TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172116
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2025144571,2024177084
出願日
2025-09-01,2019-09-11
発明の名称
画像コーディングシステムにおけるサブブロック単位の動き予測に基づく画像デコーディング方法及び装置
出願人
エルジー エレクトロニクス インコーポレイティド
,
LG ELECTRONICS INC.
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H04N
19/52 20140101AFI20251113BHJP(電気通信技術)
要約
【課題】画像コーディングの効率を高める方法及び装置を提供する。
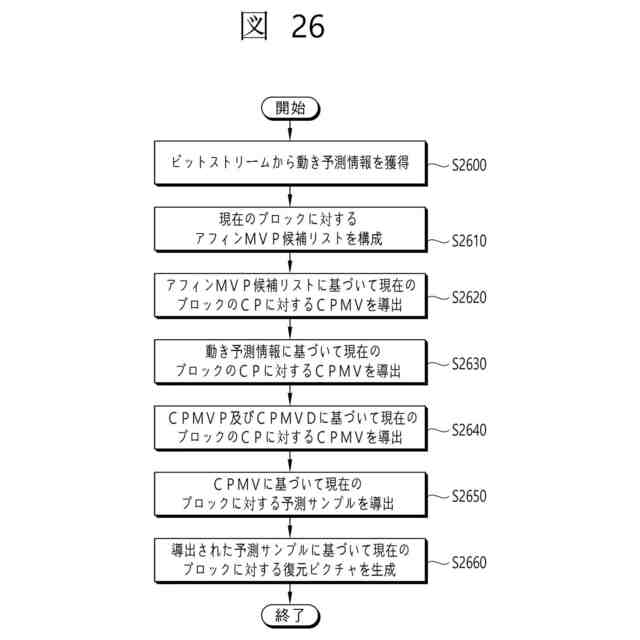
【解決手段】ビットストリームから現在のブロックに対する動き予測情報を獲得する段階と、前記現在のブロックに対するアフィンMVP候補リストを生成する段階と、前記アフィンMVP候補リストに基づいて前記現在のブロックのCPに対するCPMVPを導出する段階と、前記動き予測情報に基づいて前記現在のブロックの前記CPに対するCPMVDを導出する段階と、前記CPMVP及び前記CPMVDに基づいて前記現在のブロックの前記CPに対するCPMVを導出する段階と、前記CPMVに基づいて前記現在のブロックに対する予測サンプルを導出する段階と、を含むことができる。
【選択図】図26
特許請求の範囲
【請求項1】
デコーディング装置による画像デコーディング方法において、
ビットストリームから現在のブロックに対する動き予測情報を取得するステップと、
前記現在のブロックに対するアフィン動きベクトル予測子(MVP)候補リストを構成するステップと、
前記アフィンMVP候補リストに基づいて、前記現在のブロックのコントロールポイント(CP)に対するコントロールポイントの動きベクトル予測子(CPMVP)を導出するステップと、
前記動き予測情報に基づいて、前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル差分(CPMVD)を導出するステップと、
前記CPMVP及び前記CPMVDに基づいて、前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル(CPMV)を導出するステップと、
前記CPMVに基づいて、前記現在のブロックに対する予測サンプルを導出するステップと、
前記導出された予測サンプルに基づいて、前記現在のブロックに対する復元ピクチャを生成するステップと、
を含み、
前記アフィンMVP候補リストを構成するステップは、
第1のアフィンMVP候補が利用可能であるかどうかをチェックするステップであって、左側のブロックグループ内の第1のブロックがアフィン動きモデルでコーティングされ、前記第1のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第1のアフィンMVP候補は利用可能である、ステップと、
第2のアフィンMVP候補が利用可能であるかどうかをチェックするステップであって、上側のブロックグループ内の第2のブロックが前記アフィン動きモデルでコーティングされ、前記第2のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第2のアフィンMVP候補は利用可能である、ステップと、
利用可能なアフィンMVP候補の個数が2よりも小さいことに基づいて、第3のアフィンMVP候補が利用可能であるかどうかをチェックするステップと、を含み、
前記左側のブロックグループは、前記現在のブロックの左下側角の周辺ブロック、及び前記左下側角の周辺ブロックの上側に隣接する第1の左側の周辺ブロックを含み、
前記上側のブロックグループは、前記現在のブロックの右上側角の周辺ブロック、前記右上側角の周辺ブロックの左側に隣接する第1の上側の周辺ブロック、及び左上側角の周辺ブロックを含み、
4パラメータアフィンモデル又は6パラメータアフィンモデルがインター予測に使用され、
前記4パラメータアフィンモデルが前記インター予測に使用される場合、前記現在のブロックのCP0に対する第1の動きベクトル、及び前記現在のブロックのCP1に対する第2の動きベクトルが、前記現在のブロックの左上側のブロックグループ、及び前記現在のブロックの右上側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記6パラメータアフィンモデルが前記インター予測に使用される場合、前記CP0に対する前記第1の動きベクトル、前記CP1に対する前記第2の動きベクトル、及び前記現在のブロックのCP2に対する第3の動きベクトルが、前記現在のブロックの左上側のブロックグループ、前記現在のブロックの右上側のブロックグループ、及び前記左側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記左上側のブロックグループは、前記現在のブロックの前記左上側角の周辺ブロック、前記左上側角の周辺ブロックの下側に隣接する第2の左側の周辺ブロック、及び前記左上側角の周辺ブロックの右側に隣接する第2の上側の周辺ブロックを含み、前記右上側のブロックグループは、右上側角の周辺ブロック及び前記第1の上側の周辺ブロックを含み、左下側のブロックグループは、前記左下側角の周辺ブロック及び前記第1の左側の周辺ブロックを含み、
前記アフィンMVP候補の個数が2よりも小さいこと、及び前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルが利用可能であることに基づいて、第4のアフィンMVP候補が、前記アフィンMVP候補として導出され、
前記第4のアフィンMVP候補は、前記CP0に対する第1の動きベクトル、前記CP1に対する第2の動きベクトル、及び前記CP2に対する第3の動きベクトルで、前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルを含む、画像デコーディング方法。
続きを表示(約 3,800 文字)
【請求項2】
エンコーディング装置による画像エンコーディング方法において、
現在のブロックに対するアフィン動きベクトル予測子(MVP)候補リストを構成するステップと、
前記アフィンMVP候補リストに基づいて、前記現在のブロックのコントロールポイント(CP)に対するコントロールポイントの動きベクトル予測子(CPMVP)を導出するステップと、
前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル(CPMV)を導出するステップと、
前記CPMVP及び前記CPMVに基づいて、前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル差分(CPMVD)を導出するステップと、
前記CPMVDに関する情報を含む動き予測情報をエンコーディングするステップと、
を含み、
前記アフィンMVP候補リストを構成するステップは、
第1のアフィンMVP候補が利用可能であるかどうかをチェックするステップであって、左側のブロックグループ内の第1のブロックがアフィン動きモデルでコーティングされ、前記第1のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第1のアフィンMVP候補は利用可能である、ステップと、
第2のアフィンMVP候補が利用可能であるかどうかをチェックするステップであって、上側のブロックグループ内の第2のブロックが前記アフィン動きモデルでコーティングされ、前記第2のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第2のアフィンMVP候補は利用可能である、ステップと、
利用可能なアフィンMVP候補の個数が2よりも小さいことに基づいて、第3のアフィンMVP候補が利用可能であるかどうかをチェックするステップと、を含み、
前記左側のブロックグループは、前記現在のブロックの左下側角の周辺ブロック、及び前記左下側角の周辺ブロックの上側に隣接する第1の左側の周辺ブロックを含み、
前記上側のブロックグループは、前記現在のブロックの右上側角の周辺ブロック、前記右上側角の周辺ブロックの左側に隣接する第1の上側の周辺ブロック、及び左上側角の周辺ブロックを含み、
4パラメータアフィンモデル又は6パラメータアフィンモデルがインター予測に使用され、
前記4パラメータアフィンモデルが前記インター予測に使用される場合、前記現在のブロックのCP0に対する第1の動きベクトル、及び前記現在のブロックのCP1に対する第2の動きベクトルが、前記現在のブロックの左上側のブロックグループ、及び前記現在のブロックの右上側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記6パラメータアフィンモデルが前記インター予測に使用される場合、前記CP0に対する前記第1の動きベクトル、前記CP1に対する前記第2の動きベクトル、及び前記現在のブロックのCP2に対する第3の動きベクトルが、前記現在のブロックの左上側のブロックグループ、前記現在のブロックの右上側のブロックグループ、及び前記左側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記左上側のブロックグループは、前記現在のブロックの前記左上側角の周辺ブロック、前記左上側角の周辺ブロックの下側に隣接する第2の左側の周辺ブロック、及び前記左上側角の周辺ブロックの右側に隣接する第2の上側の周辺ブロックを含み、前記右上側のブロックグループは、右上側角の周辺ブロック及び前記第1の上側の周辺ブロックを含み、左下側のブロックグループは、前記左下側角の周辺ブロック及び前記第1の左側の周辺ブロックを含み、
前記アフィンMVP候補の個数が2よりも小さいこと、及び前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルが利用可能であることに基づいて、第4のアフィンMVP候補が、前記アフィンMVP候補として導出され、
前記第4のアフィンMVP候補は、前記CP0に対する第1の動きベクトル、前記CP1に対する第2の動きベクトル、及び前記CP2に対する第3の動きベクトルで、前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルを含む、画像エンコーディング方法。
【請求項3】
画像に対するデータの送信方法において、
前記画像に対するビットストリームを生成するステップであって、前記ビットストリームは、現在のブロックに対するアフィン動きベクトル予測子(MVP)候補リストを構成し、前記アフィンMVP候補リストに基づいて、前記現在のブロックのコントロールポイント(CP)に対するコントロールポイントの動きベクトル予測子(CPMVP)を導出し、前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル(CPMV)を導出し、前記CPMVP及び前記CPMVに基づいて、前記現在のブロックの前記CPに対するコントロールポイントの動きベクトル差分(CPMVD)を導出し、前記CPMVDに関する情報を含む動き予測情報をエンコーディングすることに基づいて生成される、ステップと、
前記ビットストリームを含む前記データを送信するステップと、
を含み、
前記アフィンMVP候補リストを構成することは、
第1のアフィンMVP候補が利用可能であるかどうかをチェックし、左側のブロックグループ内の第1のブロックがアフィン動きモデルでコーティングされ、前記第1のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第1のアフィンMVP候補は利用可能であること、
第2のアフィンMVP候補が利用可能であるかどうかをチェックし、上側のブロックグループ内の第2のブロックがアフィン動きモデルでコーティングされ、前記第2のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であることに基づいて、前記第2のアフィンMVP候補は利用可能であること、
利用可能なアフィンMVP候補の個数が2よりも小さいことに基づいて、第3のアフィンMVP候補が利用可能であるかどうかをチェックすることを含み、
前記左側のブロックグループは、前記現在のブロックの左下側角の周辺ブロック、及び前記左下側角の周辺ブロックの上側に隣接する第1の左側の周辺ブロックを含み、
前記上側のブロックグループは、前記現在のブロックの右上側角の周辺ブロック、前記右上側角の周辺ブロックの左側に隣接する第1の上側の周辺ブロック、及び左上側角の周辺ブロックを含み、
4パラメータアフィンモデル又は6パラメータアフィンモデルがインター予測に使用され、
前記4パラメータアフィンモデルが前記インター予測に使用される場合、前記現在のブロックのCP0に対する第1の動きベクトル、及び前記現在のブロックのCP1に対する第2の動きベクトルが、前記現在のブロックの左上側のブロックグループ、及び前記現在のブロックの右上側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記6パラメータアフィンモデルが前記インター予測に使用される場合、前記CP0に対する前記第1の動きベクトル、前記CP1に対する前記第2の動きベクトル、及び前記現在のブロックのCP2に対する第3の動きベクトルが、前記現在のブロックの左上側のブロックグループ、前記現在のブロックの右上側のブロックグループ、及び前記左側のブロックグループからそれぞれ導出されることに基づいて、前記第3のアフィンMVP候補は利用可能であり、
前記左上側のブロックグループは、前記現在のブロックの前記左上側角の周辺ブロック、前記左上側角の周辺ブロックの下側に隣接する第2の左側の周辺ブロック、及び前記左上側角の周辺ブロックの右側に隣接する第2の上側の周辺ブロックを含み、前記右上側のブロックグループは、右上側角の周辺ブロック及び前記第1の上側の周辺ブロックを含み、左下側のブロックグループは、前記左下側角の周辺ブロック及び前記第1の左側の周辺ブロックを含み、
前記アフィンMVP候補の個数が2よりも小さいこと、及び前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルが利用可能であることに基づいて、第4のアフィンMVP候補が、前記アフィンMVP候補として導出され、
前記第4のアフィンMVP候補は、前記CP0に対する第1の動きベクトル、前記CP1に対する第2の動きベクトル、及び前記CP2に対する第3の動きベクトルで、前記第3のアフィンMVP候補に含まれる前記CP2に対する第3の動きベクトルを含む、データ送信方法。
発明の詳細な説明
【技術分野】
【0001】
本文書は、画像コーディング技術に関し、より詳細には、画像コーディングシステムでサブブロック単位の動き情報の導出のための動き候補リストを使用する動き予測(motion prediction)に基づく画像コーディング方法及び装置に関する。
続きを表示(約 4,800 文字)
【背景技術】
【0002】
最近、4K又は8K以上のUHD(Ultra High Definition)画像/ビデオのような高解像度、高品質の画像/ビデオに対する需要が様々な分野で増加している。画像/ビデオデータが高解像度、高品質になるほど既存の画像/ビデオデータに比べて相対的に送信される情報量又はビット量が増加するため、既存の有無線広帯域回線のような媒体を利用して画像データを伝送するか、既存の保存媒体を利用して画像/ビデオデータを保存する場合、伝送費用と保存費用が増加する。
【0003】
また、最近、VR(Virtual Reality)、AR(Artificial Realtiy)コンテンツやホログラムなどの没入型メディア(Immersive Media)に対する関心及び需要が増加しており、ゲーム画像のように現実の画像と異なる画像特性を有する画像/ビデオに対する放送が増加している。
【0004】
これに伴って、前記のような多様な特性を有する高解像度高品質の画像/ビデオの情報を効果的に圧縮して送信したり保存し、再生するために高効率の画像/ビデオの圧縮技術が要求される。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本文書の技術的課題は、画像コーディングの効率を高める方法及び装置を提供することにある。
【0006】
本文書の別の技術的課題は、CPに対する候補動きベクトルが全て可用な場合にのみ、周辺ブロックに基づいてコンストラクテッドアフィンMVP候補を導出し、前記現在のブロックのアフィンMVP候補リストを構成し、構成されたアフィンMVP候補リストに基づいて、前記現在のブロックに対する予測を行う画像デコーディング方法及び装置を提供することにある。
【0007】
本文書の別の技術的課題は、可用な継承されたアフィンMVP候補及びコンストラクテッドアフィンMVP候補の個数が、MVP候補リストの候補の個数が最大の個数よりも小さい場合に、追加されたアフィンMVP候補として前記コンストラクテッドアフィンMVP候補の導出過程で、導出された候補動きベクトルを使用してアフィンMVP候補を導出し、構成されたアフィンMVP候補リストに基づいて、前記現在のブロックに対する予測を行う画像デコーディング方法及び装置を提供することにある。
【課題を解決するための手段】
【0008】
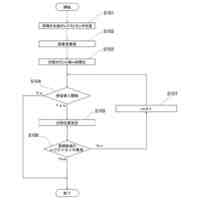
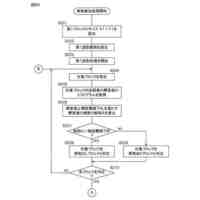
本文書の一実施例にかかる、デコーディング装置によって行われる画像デコーディング方法は、ビットストリームから現在のブロックに対する動き予測情報(motion prediction information)を獲得する段階と、前記現在のブロックに対するアフィン(affine)動きベクトル予測子(Motion Vector Predictor、MVP)候補リストを構成する段階と、前記アフィンMVP候補リストに基づいて、前記現在のブロックのCP(Control Point)に対するCPMVP(Control Point Motion Vector Predictors)を導出する段階と、前記動き予測情報に基づいて、前記現在のブロックの前記CPに対するCPMVD(Control Point Motion Vector Differences)を導出する段階と、前記CPMVP及び前記CPMVDに基づいて、前記現在のブロックの前記CPに対するCPMV(Control Point Motion Vectors)を導出する段階と、前記CPMVに基づいて、前記現在のブロックに対する予測サンプルを導出する段階と、前記導出された予測サンプルに基づいて、前記現在のブロックに対する復元ピクチャを生成する段階とを含み、前記アフィンMVP候補リストを構成する段階は、第1のアフィンMVP候補が可用であるかチェックし、前記第1のアフィンMVP候補は、左側のブロックグループ内の第1のブロックがアフィン動きモデルでコーティングされ、前記第1のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であると可用な段階と、第2のアフィンMVP候補が可用であるかチェックし、前記第2のアフィンMVP候補は、上側のブロックグループ内の第2のブロックがアフィン動きモデルでコーティングされ、前記第2のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であると可用な段階と、前記可用なアフィンMVP候補の個数が2個よりも小さいと、第3のアフィンMVP候補が可用であるかチェックし、前記第3のアフィンMVP候補は、インター予測に4パラメータアフィンモデルが適用される場合、前記現在のブロックのCP0に対する第1の動きベクトル及び前記現在のブロックのCP1に対する第2の動きベクトルが前記現在のブロックの左上段のブロックグループ及び前記現在のブロックの右上段のブロックグループから各々導出されると可用であり、前記インター予測に6パラメータアフィンモデルが適用される場合、前記現在のブロックのCP0に対する第1の動きベクトル、前記現在のブロックのCP1に対する第2の動きベクトル、及び前記現在のブロックのCP2に対する第3の動きベクトルが、前記現在のブロックの左上段のブロックグループ、前記現在のブロックの右上段のブロックグループ、及び前記左側のブロックグループから各々導出されると可用な段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記第1の動きベクトルが可用であると、第4のアフィンMVP候補を導出し、前記第4のアフィンMVP候補は前記CP0に対する動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記第2の動きベクトルが可用であると、第5のアフィンMVP候補を導出し、前記第5のアフィンMVP候補は、前記CP1に対する動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記現在のブロックのCP2に対する第3の動きベクトルが可用であると、第6のアフィンMVP候補を導出し、前記第6のアフィンMVP候補は、前記第3の動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記現在のブロックの時間的周辺ブロックに基づいて導出された時間的MVP候補が可用であると、前記時間的MVPを前記CPに対する候補動きベクトルで含む第7のアフィンMVP候補を導出する段階と、前記可用なアフィンMVP候補の個数が2個よりも小さい場合、ゼロ動きベクトル(zero motion vector)を前記CPに対する候補動きベクトルで含む第8のアフィン候補を導出する段階とを含むことができる。
【0009】
本文書の一実施例にかかる、エンコーディング装置によって行われる画像エンコーディング方法は、現在のブロックに対するアフィン(affine)動きベクトル予測子(Motion Vector Predictor、MVP)候補リストを構成する段階と、前記アフィンMVP候補リストに基づいて、前記現在のブロックのCP(Control Point)に対するCPMVP(Control Point Motion Vector Predictors)を導出する段階と、前記現在のブロックの前記CPに対するCPMVを導出する段階と、前記CPMVP及び前記CPMVに基づいて、前記現在のブロックの前記CPに対するCPMVD(Control Point Motion Vector Differences)を導出する段階と、前記CPMVDに対する情報を含む動き予測情報(motion prediction information)をエンコーディングする段階とを含み、前記アフィンMVP候補リストを構成する段階は、第1のアフィンMVP候補が可用であるかチェックし、前記第1のアフィンMVP候補は、左側のブロックグループ内の第1のブロックがアフィン動きモデルでコーディングされ、前記第1のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であると可用な段階と、第2のアフィンMVP候補が可用であるかチェックし、前記第2のアフィンMVP候補は、上側のブロックグループ内の第2のブロックがアフィン動きモデルでコーディングされ、前記第2のブロックの参照ピクチャインデックスが前記現在のブロックの参照ピクチャインデックスと同一であると可用な段階と、前記可用なアフィンMVP候補の個数が2個よりも小さいと、第3のアフィンMVP候補が可用であるかチェックし、前記第3のアフィンMVP候補は、インター予測に4パラメータアフィンモデルが適用される場合、前記現在のブロックのCP0に対する第1の動きベクトル及び前記現在のブロックのCP1に対する第2の動きベクトルが前記現在のブロックの左上段のブロックグループ及び前記現在のブロックの右上段のブロックグループから各々導出されると可用であり、前記インター予測に6パラメータアフィンモデルが適用される場合、前記現在のブロックのCP0に対する第1の動きベクトル、前記現在のブロックのCP1に対する第2の動きベクトル、及び前記現在のブロックのCP2に対する第3の動きベクトルが、前記現在のブロックの左上段のブロックグループ、前記現在のブロックの右上段のブロックグループ、及び前記左側のブロックグループから各々導出されると可用な段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記第1の動きベクトルが可用であると、第4のアフィンMVP候補を導出し、前記第4のアフィンMVP候補は、前記CP0に対する動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記第2の動きベクトルが可用であると、第5のアフィンMVP候補を導出し、前記第5のアフィンMVP候補は、前記CP1に対する動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記現在のブロックのCP2に対する第3の動きベクトルが可用であると、第6のアフィンMVP候補を導出し、前記第6のアフィンMVP候補は、前記第3の動きベクトルを前記CPに対する候補動きベクトルで含むアフィンMVP候補である段階と、前記可用なアフィンMVP候補の個数が2個よりも小さく、前記現在のブロックの時間的周辺ブロックに基づいて導出された時間的MVP候補が可用であると、前記時間的MVPを前記CPに対する候補動きベクトルで含む第7のアフィンMVP候補を導出する段階と、前記可用なアフィンMVP候補の個数が2個よりも小さい場合、ゼロ動きベクトル(zero motion vector)を前記CPに対する候補動きベクトルで含む第8のアフィンMVP候補を導出する段階とを含むことができる。
【発明の効果】
【0010】
本文書の一実施例にかかると、全般的な画像/ビデオの圧縮効率を高めることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーピース
16日前
個人
イヤーマフ
1か月前
個人
監視カメラシステム
1か月前
個人
スイッチシステム
24日前
キーコム株式会社
光伝送線路
1か月前
WHISMR合同会社
収音装置
2か月前
個人
スキャン式車載用撮像装置
1か月前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
1か月前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
2か月前
キヤノン電子株式会社
画像読取装置
24日前
株式会社リコー
画像形成装置
2か月前
キヤノン電子株式会社
画像読取装置
16日前
株式会社リコー
画像形成装置
2か月前
ヤマハ株式会社
放音制御装置
24日前
株式会社リコー
画像形成装置
1か月前
個人
映像表示装置、及びARグラス
25日前
サクサ株式会社
無線システム
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
サクサ株式会社
無線通信装置
1か月前
個人
ワイヤレスイヤホン対応耳掛け
2か月前
サクサ株式会社
無線通信装置
1か月前
キヤノン電子株式会社
画像読取装置
2か月前
株式会社リコー
画像形成装置
3か月前
日本電気株式会社
海底分岐装置
1か月前
キヤノン電子株式会社
シート搬送装置
16日前
ブラザー工業株式会社
読取装置
3か月前
個人
発信機及び発信方法
1か月前
キヤノン株式会社
情報処理装置
3日前
キヤノン株式会社
撮像システム
2か月前
キヤノン株式会社
画像処理装置
19日前
株式会社NTTドコモ
端末
1か月前
株式会社松平商会
携帯機器カバー
2か月前
大日本印刷株式会社
写真撮影装置
2か月前
日本セラミック株式会社
超音波送受信器
3日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ