TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025166137
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025134293,2024530535
出願日
2025-08-12,2021-11-25
発明の名称
5G NRハンドオーバ方式
出願人
アップル インコーポレイテッド
,
Apple Inc.
代理人
個人
,
個人
,
個人
,
個人
主分類
H04W
36/18 20090101AFI20251028BHJP(電気通信技術)
要約
【課題】本発明は、一般に無線通信に関し、特に5G NRハンドオーバ方式に関する。
【解決手段】ユーザ機器(UE)は、ソースgNBからハンドオーバコマンドを受信し、ハンドオーバコマンドの受信の後に、UEはソースgNBとデータを交換する。UEがソースgNBとデータを交換する間に、ターゲットgNBとのダウンリンク同期獲得を実行し、ターゲットgNBにアップリンク信号を送信し、ターゲットセルにアップリンク信号を送信した後に、ソースセルとのデータ交換を停止する。
【選択図】図4
特許請求の範囲
【請求項1】
動作を実行するように構成されたユーザ機器(UE)のプロセッサであって、前記動作は、
ソースセルからハンドオーバコマンドを受信することであって、前記ハンドオーバコマンドの前記受信の後に、前記UEは前記ソースセルとデータを交換するように構成されている、ことと、
前記UEが前記ソースセルとデータを交換するように構成されている間に、ターゲットセルとのダウンリンク同期獲得を実行することと、
前記ターゲットセルにアップリンク信号を送信することであって、前記ターゲットセルに前記アップリンク信号を送信した後に、前記UEは前記ソースセルとのデータ交換を停止する、ことと、を含む、ユーザ機器(UE)。
続きを表示(約 1,000 文字)
【請求項2】
前記UEは、前記アップリンク信号を送信した後にソースセル構成を保持する、請求項1に記載のプロセッサ。
【請求項3】
前記動作は、
前記ハンドオーバコマンドに応じて前記ソースセルにフィードバックを送信することを更に含み、前記フィードバックは、前記UEが前記ハンドオーバコマンドの前記受信の後に、前記ソースセルとデータを交換するように構成されたままであることを示す、請求項1に記載のプロセッサ。
【請求項4】
前記フィードバックは、物理アップリンク制御チャネル(PUCCH)スケジューリング要求(SR)又はサウンディング基準信号(SRS)中で提供される、請求項3に記載のプロセッサ。
【請求項5】
前記フィードバックは、媒体アクセス制御(MAC)制御要素(CE)において提供される、請求項3に記載のプロセッサ。
【請求項6】
前記フィードバックは、無線リソース制御(RRC)構成完了メッセージ又はUE支援情報において提供される、請求項3に記載のプロセッサ。
【請求項7】
前記動作は、
前記UEによって動作されるタイマの満了より前に、前記UEに送信された前記アップリンク信号に対する応答を受信しないことに基づいてハンドオーバ失敗を宣言することを更に含む、請求項1に記載のプロセッサ。
【請求項8】
前記動作は、
前記ハンドオーバ失敗に応じて、前記ターゲットセルとのランダムアクセスチャネル(RACH)ベースのハンドオーバを実行することを更に含む、請求項8に記載のプロセッサ。
【請求項9】
前記動作は、
前記ハンドオーバ失敗の指示を前記ソースセルに送信することを更に含み、前記UEは、前記ハンドオーバ失敗に応じて、前記ソースセル構成にフォールバックする、請求項8に記載のプロセッサ。
【請求項10】
前記動作は、
前記ターゲットセルとのランダムアクセスチャネル(RACH)障害に基づいてハンドオーバ失敗を宣言することと、
前記ハンドオーバ失敗の指示を前記ソースセルに送信することと、を更に含み、前記UEは、前記ハンドオーバ失敗に応じて前記ソースセル構成にフォールバックする、請求項1に記載のプロセッサ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本出願は、一般に無線通信に関し、特に5G NRハンドオーバ方式に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ユーザ機器(UE)は、ネットワークのノードに接続し得る。接続されると、UEのハンドオーバがソースノードとターゲットノードとの間で発生し得る。第5世代(5G)新無線(NR)メークビフォアブレーク(MBB)ハンドオーバ方式をサポートするように構成された技法の必要性が存在することが識別されている。5G NRランダムアクセスチャネル(RACH)レスハンドオーバ方式をサポートするように構成された技法の必要性が存在することも識別されている。
【発明の概要】
【0003】
いくつかの例示的な実施形態は、動作を実行するように構成されたユーザ機器(UE)のプロセッサにする。動作は、ソースセルからハンドオーバコマンドを受信することであって、ハンドオーバコマンドの受信の後に、UEはソースセルとデータを交換するように構成されている、ことと、UEがソースセルとデータを交換するように構成されている間に、ターゲットセルとのダウンリンク同期獲得を実行することと、ターゲットセルにアップリンク信号を送信することであって、ターゲットセルにアップリンク信号を送信した後に、UEはソースセルとのデータ交換を停止する、ことと、を含む。
【0004】
他の例示的な実施形態は、動作を実行するように構成された基地局のプロセッサに関連している。動作は、ユーザ機器(UE)にハンドオーバコマンドを送信することと、UEが、ハンドオーバコマンドの受信の後に基地局とデータを交換するように構成されたままであるように構成されているかどうかを判定することと、ターゲット基地局へのハンドオーバの完了の前に、UEにダウンリンク信号を送信することと、を含む。
【0005】
更に別の例示的な実施形態は、動作を実行するように構成されたユーザ機器(UE)のプロセッサに関する。動作は、ソースセルからハンドオーバコマンドを受信することと、ターゲットセルにアップリンク信号であって、アップリンク信号は、ユーザデータを含み、ハンドオーバコマンドの受信の後にターゲットセルに対して実行される第1の送信である、アップリンク信号を送信することと、を含み、UEは、第1の送信の前にターゲットセルにいかなる信号も送信しない。
【図面の簡単な説明】
【0006】
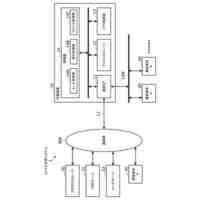
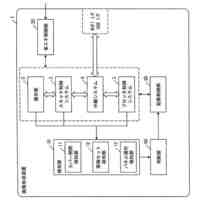
様々な例示的な実施形態による例示的なネットワーク配置を示す図である。
【0007】
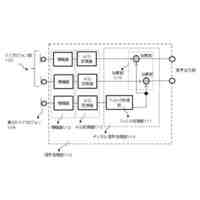
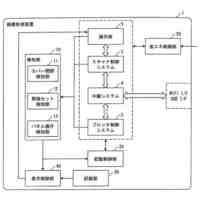
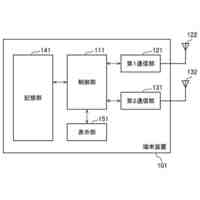
様々な例示的な実施形態に係る、例示的なユーザ機器(UE)を示す図である。
【0008】
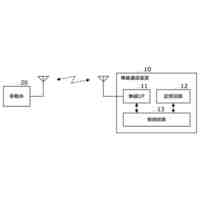
様々な例示的な実施形態による例示的な基地局を示す。
【0009】
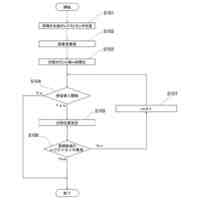
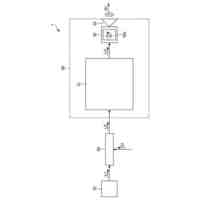
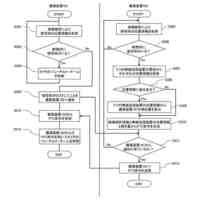
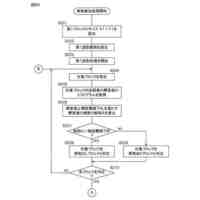
様々な例示的な実施形態による、第5世代(5G)新無線(NR)メークビフォアブレーク(MBB)ハンドオーバのためのシグナリング図を示す。
【0010】
様々な例示的な実施形態による、5G NRランダムアクセスチャネル(RACH)レスハンドオーバのためのシグナリング図を示す。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーピース
1日前
個人
イヤーマフ
15日前
個人
監視カメラシステム
24日前
キーコム株式会社
光伝送線路
25日前
個人
スイッチシステム
9日前
サクサ株式会社
中継装置
1か月前
サクサ株式会社
中継装置
1か月前
WHISMR合同会社
収音装置
1か月前
個人
スキャン式車載用撮像装置
24日前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
1か月前
サクサ株式会社
無線システム
29日前
個人
映像表示装置、及びARグラス
10日前
株式会社リコー
画像形成装置
3か月前
サクサ株式会社
無線通信装置
1か月前
キヤノン電子株式会社
画像読取装置
9日前
キヤノン電子株式会社
画像読取装置
1か月前
サクサ株式会社
無線通信装置
1か月前
キヤノン電子株式会社
画像読取装置
23日前
株式会社リコー
画像形成装置
17日前
キヤノン電子株式会社
画像読取装置
1日前
ヤマハ株式会社
放音制御装置
9日前
個人
ワイヤレスイヤホン対応耳掛け
1か月前
株式会社リコー
画像形成装置
2か月前
株式会社リコー
画像形成装置
2か月前
個人
発信機及び発信方法
29日前
キヤノン電子株式会社
シート搬送装置
1日前
キヤノン株式会社
撮像システム
1か月前
日本電気株式会社
海底分岐装置
25日前
キヤノン株式会社
画像処理装置
4日前
ブラザー工業株式会社
読取装置
2か月前
株式会社NTTドコモ
端末
24日前
シャープ株式会社
端末装置
22日前
株式会社NTTドコモ
端末
24日前
株式会社NTTドコモ
端末
25日前
株式会社NTTドコモ
端末
25日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ