TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165005
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024068834
出願日
2024-04-22
発明の名称
情報処理装置、移動体、情報処理システム、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/246 20240101AFI20251027BHJP(制御;調整)
要約
【課題】位置推定用のマップの精度を高い精度で維持することができる情報処理装置を提供する。
【解決手段】少なくとも1つの移動体と通信可能な情報処理装置であって、実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを管理する特徴量マップ管理手段を有し、前記特徴量マップ管理手段は、前記移動体により前記特徴量マップに基づいた位置推定処理を行ったときの点群データと、前記特徴量マップとの適合度合いに基づき、前記適合度合いが小さいほど前記分割領域の信頼度が低くなるように前記分割領域ごとの前記信頼度を算出する信頼度算出手段と、前記分割領域ごとの前記信頼度に基づいて前記特徴量マップを更新する特徴量マップ更新手段と、を有することを特徴とする。
【選択図】図3
特許請求の範囲
【請求項1】
少なくとも1つの移動体と通信可能な情報処理装置であって、
実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを管理する特徴量マップ管理手段を有し、
前記特徴量マップ管理手段は、
前記移動体により前記特徴量マップに基づいた位置推定処理を行ったときの点群データと、前記特徴量マップとの適合度合いに基づき、前記適合度合いが小さいほど前記分割領域の信頼度が低くなるように前記分割領域ごとの前記信頼度を算出する信頼度算出手段と、
前記分割領域ごとの前記信頼度に基づいて前記特徴量マップを更新する特徴量マップ更新手段と、を有することを特徴とする情報処理装置。
続きを表示(約 1,800 文字)
【請求項2】
前記特徴量マップは、
前記実空間を異なるサイズの格子状に区切った前記分割領域ごとに、前記分割領域に含まれる前記点群データに基づいて算出された特徴量を有し、前記分割領域が前記実空間における位置と対応づけられた複数の特徴量マップであることを特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記信頼度算出手段は、
前記信頼度が低いと判断された前記分割領域と重複する、前記分割領域のサイズより小さい分割領域に基づいて生成された特徴量マップの前記信頼度も低いと判断することを特徴とする請求項2に記載の情報処理装置。
【請求項4】
前記特徴量マップ更新手段は、
前記特徴量マップの前記信頼度が所定の閾値よりも低い前記分割領域における特徴量を削除することで前記特徴量マップを更新することを特徴とする請求項2に記載の情報処理装置。
【請求項5】
前記特徴量マップ更新手段は、
前記特徴量マップの前記信頼度が所定値以下と判断された前記分割領域の前記点群データを前記移動体から取得し、取得した前記点群データに基づいて、特徴量を算出し当該分割領域の新しい特徴量として更新することを特徴とする請求項1に記載の情報処理装置。
【請求項6】
情報処理装置と通信可能な移動体であって、
前記情報処理装置から、実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを取得する取得手段と、
前記特徴量マップに基づいて自己位置推定を行う位置推定手段と、
前記自己位置推定を行った時の点群データと、前記特徴量マップとの適合度合い情報を前記情報処理装置へ送信する送信手段と、を有することを特徴とする移動体。
【請求項7】
実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを管理する特徴量マップ管理手段と、
前記特徴量マップに基づいて自己位置推定を行う位置推定手段と、
前記自己位置推定を行った時の点群データと、前記特徴量マップとの適合度合いに基づき、前記適合度合いが小さいほど前記分割領域の信頼度が低くなるように前記分割領域ごとの前記信頼度を算出する信頼度算出手段と、
前記分割領域ごとの前記信頼度に基づいて前記特徴量マップを更新する特徴量マップ更新手段と、を有することを特徴とする移動体。
【請求項8】
少なくとも1つの移動体と情報処理装置とからなるシステムであって、
前記情報処理装置は、
実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを管理する特徴量マップ管理手段を有し、
前記特徴量マップ管理手段は、
前記移動体により前記特徴量マップに基づいた位置推定処理を行ったときの点群データと、前記特徴量マップとの適合度合い情報に基づき、前記適合度合い情報に含まれる適合度合いが小さい前記分割領域の信頼度が低くなるように前記分割領域ごとの前記信頼度を算出する信頼度算出手段と、
前記分割領域ごとの前記信頼度に基づいて前記特徴量マップを更新する特徴量マップ更新手段と、を有し、
前記移動体は、
前記特徴量マップに基づいて自己位置推定を行う位置推定手段と、
前記自己位置推定を行った時の前記点群データと、前記特徴量マップとの前記適合度合い情報を前記情報処理装置へ送信する送信手段と、を有することを特徴とする情報処理システム。
【請求項9】
請求項1~5のいずれか1項に記載の前記情報処理装置、又は請求項8に記載の情報処理システムの各手段をコンピュータにより制御するためのコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、移動体、情報処理システム、及びコンピュータプログラム等に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、移動体などの現実空間における位置を把握する手段として特許文献1のような自己位置推定技術が知られている。このような位置推定技術は、予め作成しておいた位置推定用の地図と、移動体の走行時に移動体に搭載されているセンサーからリアルタイムに取得されるセンサーデータとをマッチングさせることにより、位置推定の地図上での移動体の位置を推定する。
【先行技術文献】
【特許文献】
【0003】
特開2023-54315号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の位置推定技術では、予め位置推定用の地図を作成しておく必要がある。従って、位置推定実行時に、移動体周囲の樹木や建造物などの経時変化やその他の移動体等の有無の差、測定ノイズなどにより、位置推定用の地図と、位置推定実行時の移動体の周囲環境との間で差が生じる場合がある。
【0005】
このような位置推定用の地図と位置推定実行時の移動体の周囲環境との間で差が生じた状態で位置推定を実行すると、推定結果となる位置精度が低下するという課題がある。
【0006】
従って本発明では、位置推定用のマップの精度を高い精度で維持することができる情報処理装置を提供することを目的の1つとする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明の1つの側面は、
少なくとも1つの移動体と通信可能な情報処理装置であって、
実空間を格子状に区切った分割領域ごとに、前記分割領域に含まれる予め取得された点群データに基づいて算出された特徴量を有する特徴量マップであって、前記分割領域が前記実空間における位置と対応づけられた特徴量マップを管理する特徴量マップ管理手段を有し、
前記特徴量マップ管理手段は、
前記移動体により前記特徴量マップに基づいた位置推定処理を行ったときの点群データと、前記特徴量マップとの適合度合いに基づき、前記適合度合いが小さいほど前記分割領域の信頼度が低くなるように前記分割領域ごとの前記信頼度を算出する信頼度算出手段と、
前記分割領域ごとの前記信頼度に基づいて前記特徴量マップを更新する特徴量マップ更新手段と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、位置推定用のマップの精度を高い精度で維持することができる情報処理装置を実現できる。
【図面の簡単な説明】
【0009】
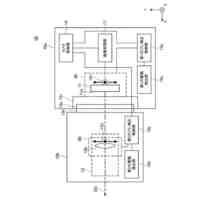
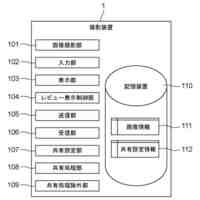
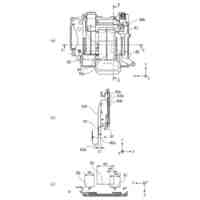
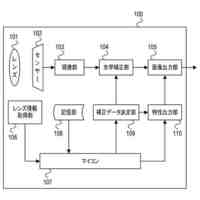
本発明の実施形態1に係るサーバー1の内部構成例を説明する図である。
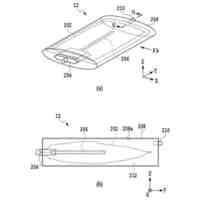
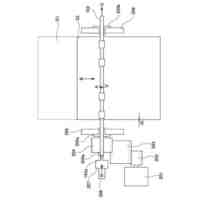
実施形態1に係る移動体2の内部構成例を説明する図である。
実施形態1に係るサーバー1の処理フロー例を説明するフローチャートである。
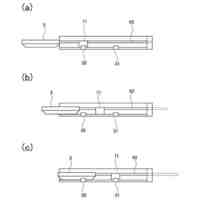
(A)~(C)は、ステップS310における特徴量マップの生成方法の例を説明する図である。
実施形態1に係る移動体2の処理フロー例を説明するフローチャートである。
(A)、(B)は、実施形態1に係る移動体2がステップS540で行う位置推定の詳細な例を説明する図である。
(A)~(C)は、実施形態1に係る特徴量マップの更新方法の詳細な例を説明する図である。
実施形態2に係るサーバー1の処理フロー例を説明するフローチャートである。
(A)、(B)は、実施形態2に係る特徴量マップの例を説明する図である。
実施形態2に係る移動体2の処理フロー例を説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下、図面を参照して本発明の実施形態を説明する。ただし、本発明は以下の実施形態に限定されるものではない。なお、各図において、同一の部材または要素については同一の参照番号を付し、重複する説明は省略または簡略化する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
キヤノン株式会社
容器
12日前
キヤノン株式会社
容器
6日前
キヤノン株式会社
トナー
28日前
キヤノン株式会社
トナー
15日前
キヤノン株式会社
トナー
28日前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
トナー
28日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
撮像装置
29日前
キヤノン株式会社
現像装置
19日前
キヤノン株式会社
撮像装置
6日前
キヤノン株式会社
現像容器
26日前
キヤノン株式会社
現像装置
26日前
キヤノン株式会社
測距装置
21日前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
現像装置
26日前
キヤノン株式会社
現像容器
26日前
キヤノン株式会社
定着装置
27日前
キヤノン株式会社
撮影装置
26日前
キヤノン株式会社
測距装置
今日
キヤノン株式会社
記録装置
26日前
キヤノン株式会社
表示装置
6日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
モジュール
28日前
キヤノン株式会社
液体収容体
1日前
キヤノン株式会社
液体収容体
今日
キヤノン株式会社
光学センサ
28日前
キヤノン株式会社
画像処理装置
26日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
29日前
キヤノン株式会社
画像形成装置
29日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
29日前
キヤノン株式会社
電子写真装置
19日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ