TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160113
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2025040593
出願日
2025-03-13
発明の名称
生涯学習に基づくロボットのシーン認識方法
出願人
杭州電子科技大学
,
Hangzhou Dianzi University
代理人
弁理士法人ATEN
主分類
G06V
20/00 20220101AFI20251015BHJP(計算;計数)
要約
【課題】本発明は生涯学習に基づくロボットのシーン認識方法を提供する。
【解決手段】先進的な特徴抽出技術と集約技術を集積することによって、長期記憶と短期記憶のメカニズム、及び知能的知識蒸留と記憶知覚シナプスポリシーを統合し、ロボットのシーンに対する認識正確性と生涯学習能力を向上させる。本発明の生涯学習ロボットのシーン認識方法は、性能が著しく向上し、特に複雑で変化に富む環境において、従来の技術と比べ、本方法はより高い識別正確率とより優れた長期学習能力を提供することができる。複数の季節のNordlandと複数の照明条件のOxfordデータセットへの適用とテストによって、本発明はその異なるシーンに対する強力な識別能力、及び生涯学習シーンにおいて古い知識の保持と新しい知識の学習とを調和させることに成功した。
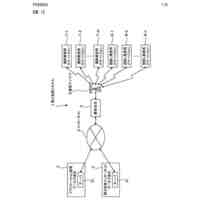
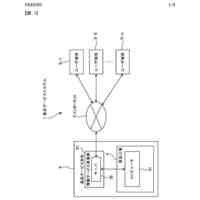
【選択図】図1
特許請求の範囲
【請求項1】
生涯学習に基づくロボットのシーン認識方法であって、以下のステップを含み、
ステップS1:ロボットカメラにより撮影されたシーン画像を取得し、
ステップS2:シーン画像に対して前処理を行い、
ステップS3:前処理後のシーン画像を長短期三重記憶モジュールに入力し、前記長短期三重記憶モジュールからランダムに一つのアンカーデータI
a
をサンプリングして学習シーンとし、その後、学習シーンI
a
と同じシーンに属する複数の正のサンプルデータI
pi
をランダムにサンプリングして学習サンプルとし、前記学習シーンI
a
と異なるシーンに属する複数の負のサンプルデータI
ni
をランダムにサンプリングし、
前記学習シーンI
a
、前記複数の正のサンプルデータI
pi
、前記複数の負のサンプルデータI
ni
から小サンプルセットを構成し、
ステップS4:前記小サンプルセット内のデータをシーン認識ネットワークに入力し、対応する特徴ベクトルの小サンプルセットf
a
,f
pi
,f
ni
を出力し、特徴ベクトル間のコサイン類似度によって、最も類似しない同じシーンの特徴ベクトルf
p
と最も類似する異なるシーンの特徴ベクトルf
n
を探し出し、前記学習シーンに対応する特徴ベクトルf
a
と1つのディープマイニング後の三つのグループを構成し、
ステップS5:前記長短期三重記憶モジュールに対して記憶更新を行い、
ステップS6:ステップS1~S5を繰り返し、シーン認識ネットワークの学習を完了し、
ステップS7:シーン画像をシーン認識ネットワークに入力し、特徴ベクトルf’を出力し、
ステップS8:前記特徴ベクトルf’とデータベース内の既存のシーン特徴ベクトルとを比較し、類似度が最も高いシーンを認識結果として探し出し、シーン認識機能を実現する
ことを特徴とする生涯学習に基づくロボットのシーン認識方法。
続きを表示(約 2,000 文字)
【請求項2】
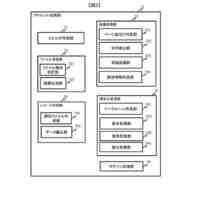
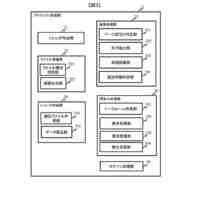
前記長短期三重記憶モジュールは、短期記憶モジュール、パノラマ記憶モジュール及び長期記憶モジュールを含み、
短期記憶モジュールは、先入れ先出し画像列を用いて実現され、
パノラマ記憶モジュールは、短期記憶モジュールが画像を出力し、内部フィルタリングを行うことによって形成され、
長期記憶モジュールは、履歴シーンのパノラマ記憶モジュールによってフィルタリングされて得られる、ことを特徴とする請求項1に記載の方法。
【請求項3】
前記シーン認識ネットワークは、VGG特徴抽出器、VLADアグリゲータを含む、ことを特徴とする請求項1に記載の方法。
【請求項4】
前記VGG特徴抽出器は、VGG16特徴抽出器を用い、
前記VLADアグリゲータは、NetVLADアグリゲータを用い、
前記NetVLADアグリゲータは、具体的には、クラスタリング及び残差加算によって特徴の集約を実現する、ことを特徴とする請求項3に記載の方法。
【請求項5】
前記シーン認識ネットワークの損失関数が以下のとおりであり、
JPEG
2025160113000018.jpg
18
134
ここで、tはt番目の環境の損失関数を示し、λ
1
、λ
2
はハイパーパラメータであり、L
hard-triplet
はディープマイニングの三つのグループの損失関数であり、L
RMAS
は関係型記憶知覚シナプス損失関数であり、L
KD
は分布に基づく知識蒸留損失関数であり、
前記ディープマイニングの三つのグループの損失関数L
hard-triplet
は、具体的には以下のとおりであり、
JPEG
2025160113000019.jpg
35
129
ここで、符号(2-1)はシーン認識ネットワークが出力したi番の負のサンプル画像特徴とアンカー画像特徴のコサイン類似度であり、符号(2-2)はシーン認識ネットワークが出力したj番の正のサンプル画像特徴とアンカー画像特徴の類似度であり、δは人為的に設定したハイパーパラメータであり、
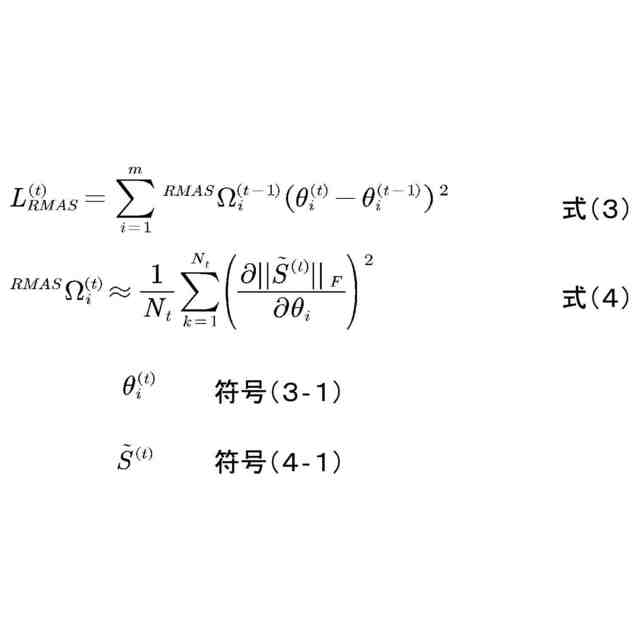
前記関係型記憶知覚シナプス損失関数であるL
RMAS
は、具体的には以下のとおりであり、
JPEG
2025160113000020.jpg
50
142
ここで、符号(3-1)はシーン認識ネットワークがt番目のタスクを学習したときのi番目のパラメータを示し、N
t
は訓練バッチにおけるサンプル数を示し、符号(4-1)はタスクtまで訓練したときの三つのグループのサンプルからなるグラム行列を示し、Fはフロベニウスノルムであり、
前記分布に基づく知識蒸留損失関数L
KD
は、具体的には以下のとおりであり、
JPEG
2025160113000021.jpg
62
168
ここで、式(6)の、符号(6-1)はt番目の環境においてシーン認識ネットワークが抽出したi番目の特徴ベクトルを示し、dは符号(6-1)の次元である、ことを特徴とする請求項1に記載の方法。
【請求項6】
前記ステップS5において、具体的には、短期記憶モジュールの中で最も古いシーンがパノラマ記憶モジュールに書き込まれ、パノラマ記憶モジュールの空間がいっぱいになれば、読み込まれたデータ量に対する空間容量の割合を更新の確率として、パノラマ記憶モジュール内部のデータをランダムに入れ替え、パノラマ記憶モジュールが現在の完全な環境を表現できることを確保し、新しい環境に入った後、前の環境のパノラマ記憶モジュールを前記割合に応じて長期記憶モジュールに書き込み、長期記憶モジュールが現在までの複数の環境を表現できるようにする、ことを特徴とする請求項1に記載の方法。
【請求項7】
コンピュータが読み取り可能な記憶媒体であって、
コンピュータプログラムが記憶され、前記コンピュータプログラムがコンピュータ内で実行されると、請求項1~6のいずれか1項に記載方法をコンピュータに実行させる、ことを特徴とするコンピュータが読み取り可能な記憶媒体。
【請求項8】
コンピュータ装置であって、
メモリ及びプロセッサを含み、
前記メモリに実行可能コードを記憶し、前記プロセッサが前記実行可能コードを実行するとき、請求項1~6のいずれか1項に記載の方法を実施する、ことを特徴とするコンピュータ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット技術分野に属し、特に生涯学習に基づくロボットのシーン認識方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
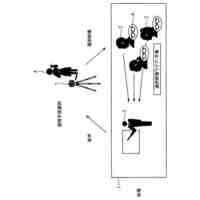
広義に言えば、ループ閉鎖検出タスクはシーン認識タスクに相当し、目標は現在いるシーンを探し出すことである。ループ閉鎖検出は現代同期位置決めと作図(SLAM)システムの重要な構成部分であり、主にループ閉鎖検出後の累積オフセット誤差の除去に用いられ、作図の正確性を向上させ、かつロボットのシーン認識機能を実現する。ループ閉鎖検出の目標は、ある環境の画像が与えられたとき、その環境を過去に経験したことがあれば、それを認識することであり、ロボットにシーン認識能力を持たせることである。
【0003】
従来のループ閉鎖検出方法は手動で特徴を計算する方式を採用し、例えばHoG、SIFTなどのアルゴリズムを使用し、視覚言語を生成し、且つそれに基づいて語の袋(BoW:Bag of Words)モデルを構築する。ループ閉鎖検出はその後、人工知能の発展にともない、深層学習の手法を用いて実現されるようになる。主なモデルは2つの部分から構成され、すなわち画像内のいくつかの特徴を抽出する特徴抽出器と、複数の特徴を統合するアグリゲータである。最後にアグリゲータから出力された各結果を互いに比較し、ループ閉鎖検出問題を画像検索問題に変換する。
【0004】
このような方法は理論的にロボットのシーン認識を実現することができるが、実際の応用では多くの他の問題に直面する。実際にプロジェクトに配備されたロボットは単一のシーンで活動するわけではないため、ロボットのシーン認識能力は様々な状況に応じて増えていく環境に対応する必要がある。しかし、ロボットの記憶能力は限られており、特別な設計を行わなければ、次の2つの結果しかもたらさない。
1、ロボットは新しいシーンを学習した後、古いシーンの認識能力を忘れる。これは壊滅的な忘却である。
2、ロボットはすべてのシーンのデータを保持するが、ロボットが使用されるにつれて、記憶オーバーヘッドが巨大になり、オンライン配備を実現することが難しい。
したがって、上記の問題を解決するために、本発明は生涯学習に基づくロボットのシーン認識方法を提案する。
【0005】
ロボットの生涯学習は、人間を模倣した学習過程である。人間は学習の過程で孤立しているのではなく、過去に学んだ知識を絶えず蓄積し、かつ過去の知識を利用してより多くの知識を学習し、ある程度は忘れるが、時間が経つにつれて、ますます多くの知識を学習する。生涯学習は3つの特徴を有する。
1.継続的に学習する。
2.知識が知識ベースに蓄積される。
3.過去の知識を利用して未来の知識を学習することを助ける。
生涯学習をロボットのシーン認識に応用することで、ロボットは壊滅的な忘却を起こさずにより多くのシーンを学習することができる。
【0006】
近年、生涯学習に基づくいくつかの方法でロボットのシーン認識を実現したが、以下の面で欠陥がある。まず、アグリゲータで単純なプーリング方法を使用すると、連続撮影されたシーン画像にうまく適応できない。次に、比較学習では通常、三つのグループの損失関数を使用するため、学習過程が不安定になり、学習効率が悪い。次に、知識蒸留の設計が簡単すぎて、モデルの全体的な蒸留効果を考慮していない。最後に、記憶再生において記憶モジュールの設計が十分に詳細化されていないため、性能が悪い。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明は生涯学習に基づくロボットのシーン認識に用いるループ閉鎖検出方法を設計し、生涯学習の方法を採用し、手作業設計の複雑さを減少させるだけでなく、オンライン配置と複数のシーンへの適応を容易にする。これまでのループ閉鎖検出方法に存在する欠陥に対して、本発明は性能がより優れたアグリゲータを採用し、三つのグループに基づく計量学習方法を改善する。モデルの壊滅的な忘却を予防するために、本発明は生物学に基づく長短期三重記憶モジュールを提案し、生涯学習を実現すると同時に、比較学習を促進してモデルの学習効率を向上させ、これによってロボットの領域を超えたシーン認識機能を実現する。
【0008】
本発明の目的は、前記従来技術の不足を克服し、生涯学習に基づくロボットのシーン認識方法を提供することである。
【課題を解決するための手段】
【0009】
第1の態様では、本発明は生涯学習に基づくロボットのシーン認識方法を提供し、前記方法は以下を含む。
ステップS1:ロボットカメラにより撮影されたシーン画像を取得する。
ステップS2:シーン画像に対して前処理を行う。
ステップS3:前処理後のシーン画像を長短期三重記憶モジュールに入力する。長短期三重記憶モジュールから共同でランダムにアンカーデータI
a
をサンプリングして学習シーンとし、その後、学習シーンI
a
と同じシーンに属する複数の正のサンプルデータI
pi
をランダムにサンプリングして学習のサンプルとし、学習シーンI
a
と異なるシーンに属する複数の負のサンプルデータI
ni
をランダムにサンプリングする。
学習シーンI
a
、複数の正のサンプルデータI
pi
、複数の負のサンプルデータI
ni
から小サンプルセットを構成する。
ステップS4:小サンプルセット内のデータをシーン認識ネットワークに入力し、対応する特徴ベクトルの小サンプルセットf
a
,f
pi
,f
ni
を出力し、特徴ベクトル間のコサイン類似度によって、最も類似しない同じシーンの特徴ベクトルf
p
と最も類似する異なるシーンの特徴ベクトルf
n
を探し出し、学習シーンに対応する特徴ベクトルf
a
と1つのディープマイニング後の三つのグループを構成する。ディープマイニング後の三つのグループf
a
,f
p
,f
n
によって損失関数を計算する。
前記シーン認識ネットワークはVGG16特徴抽出器、NetVLADアグリゲータを含む。
前記NetVLADアグリゲータは、具体的にクラスタリングと残差合計によって特徴の集約を実現する。
【0010】
前記シーン認識ネットワークの損失関数は以下のとおりである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
杭州電子科技大学
生涯学習に基づくロボットのシーン認識方法
14日前
杭州電子科技大学
データ相対定常状態分析に基づく知識獲得方法
13日前
杭州電子科技大学
放電連続エッチングピットの最大深さの測定方法
4か月前
杭州電子科技大学
大規模言語モデルに基づく専攻推薦知識グラフ構築方法及び検索システム
2か月前
個人
詐欺保険
22日前
個人
縁伊達ポイン
22日前
個人
RFタグシート
9日前
個人
QRコードの彩色
26日前
個人
ペルソナ認証方式
6日前
個人
地球保全システム
1か月前
個人
情報処理装置
1日前
個人
自動調理装置
8日前
個人
為替ポイント伊達夢貯
2か月前
個人
冷凍食品輸出支援構造
2か月前
個人
残土処理システム
28日前
個人
表変換編集支援システム
1か月前
個人
農作物用途分配システム
21日前
個人
インターネットの利用構造
5日前
個人
知財出願支援AIシステム
2か月前
個人
知的財産出願支援システム
29日前
個人
タッチパネル操作指代替具
15日前
個人
行動時間管理システム
1か月前
個人
携帯端末障害問合せシステム
14日前
個人
AIによる情報の売買の仲介
2か月前
個人
パスワード管理支援システム
1か月前
個人
スケジュール調整プログラム
14日前
個人
海外支援型農作物活用システム
1か月前
株式会社キーエンス
受発注システム
1か月前
個人
パスポートレス入出国システム
2か月前
個人
AIキャラクター制御システム
1か月前
個人
システム及びプログラム
1か月前
株式会社キーエンス
受発注システム
1か月前
株式会社アジラ
進入判定装置
2か月前
個人
エリアガイドナビAIシステム
6日前
個人
食品レシピ生成システム
1か月前
株式会社キーエンス
受発注システム
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ