TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157277
公報種別
公開特許公報(A)
公開日
2025-10-15
出願番号
2025109303,2022520085
出願日
2025-06-27,2020-09-30
発明の名称
ツールの動きを誘導するためのシステム及び方法
出願人
マコ サージカル コーポレーション
代理人
個人
,
個人
,
個人
,
個人
主分類
A61B
34/35 20160101AFI20251007BHJP(医学または獣医学;衛生学)
要約
【課題】ツールの動きを誘導するためのシステム及び方法を提供する。
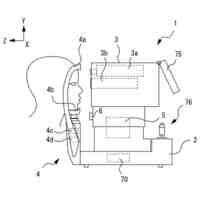
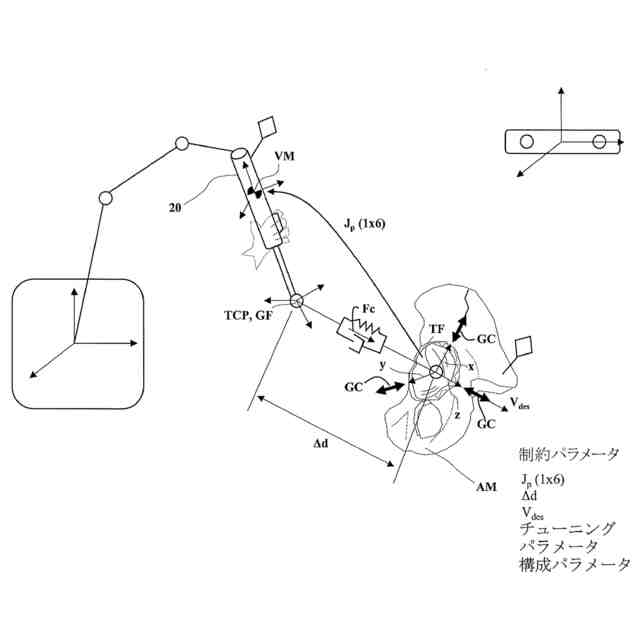
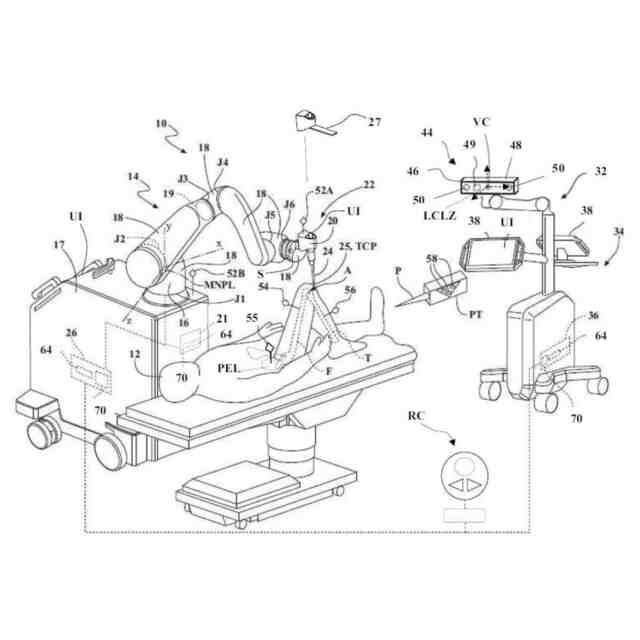
【解決手段】システムは、ツール20と、マニピュレータとを備える。誘導ハンドラは、ツールの目標状態を取得し、ツールの目標状態及び現在の状態に基づいて仮想制約を生成する。制約ソルバは、仮想制約に基づいて、ツールを目標状態に誘引する、またはツールを目標状態から退けるように適合された制約力を計算する。仮想シミュレータは、制約力と、1つ以上のセンサからの入力とに基づいた仮想シミュレーションでツールの動きをシミュレートし、指令姿勢を出力する。制御システムは、マニピュレータに指令して、ツールを指令姿勢に基づいて動かすことで、ツールを目標状態に配置する、または目標状態から離すようにユーザを誘導する触覚フィードバックをユーザに提供する。
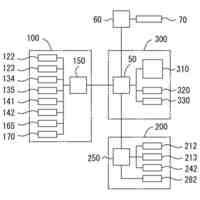
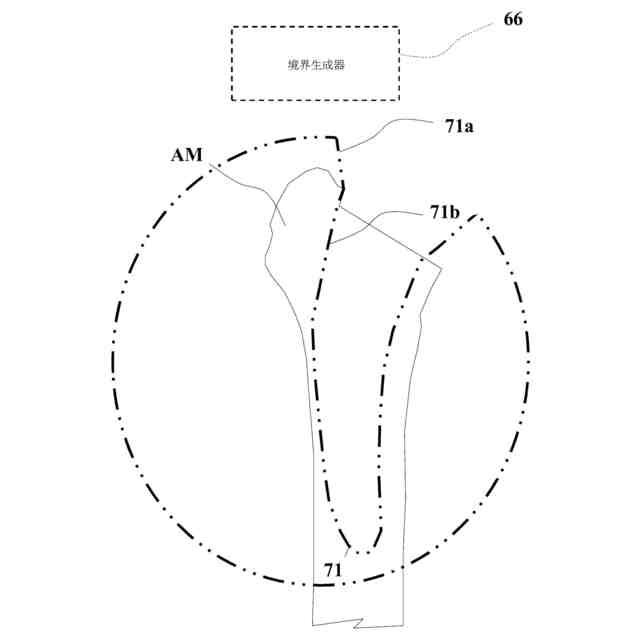
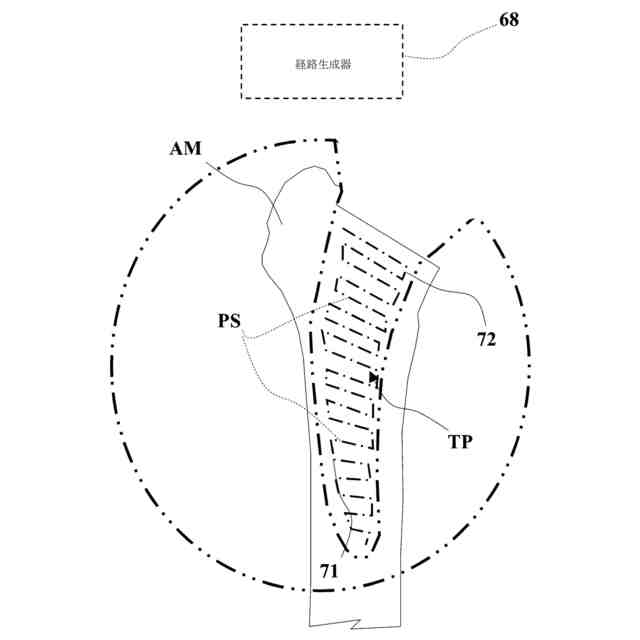
【選択図】図10
特許請求の範囲
【請求項1】
ツールと、
前記ツールを支持し、ユーザが前記ツールに加えたユーザの力及びトルクに応じて前記ツールを動かすマニピュレータと、
前記ツールに加えられた力及びトルクを測定する1つ以上のセンサと、
制御システムと
を備えた外科システムであって、
前記制御システムが、
前記ツールの目標状態を取得し、前記ツールの前記目標状態及び現在の状態に基づいて1つ以上の仮想制約を生成する誘導ハンドラと、
前記1つ以上の仮想制約に基づいて、前記ツールを前記目標状態に誘引する、または前記ツールを前記目標状態から退けるように適合された制約力を計算する制約ソルバと、
前記1つ以上のセンサからの入力と、前記制約力とに基づいた仮想シミュレーションで前記ツールの動きをシミュレートし、指令姿勢を出力する仮想シミュレータと
を備え、
前記制御システムは、前記マニピュレータに指令して、前記ツールを前記指令姿勢に基づいて動かすことで、前記ツールを前記目標状態に配置する、または前記目標状態から離すように前記ユーザを誘導する触覚フィードバックを前記ユーザに提供する、
外科システム。
続きを表示(約 880 文字)
【請求項2】
前記目標状態は、目標位置、目標配向、または目標姿勢を含み、前記現在の状態は、現在の位置、現在の配向、または現在の姿勢を含む、請求項1に記載の外科システム。
【請求項3】
前記1つ以上の仮想制約は、前記目標位置に関連付けられた最大3つの仮想制約と、前記目標配向に関連付けられた最大3つの仮想制約とを含む、請求項2に記載の外科システム。
【請求項4】
前記制御システムは、前記ユーザが前記ツールを前記目標配向から離して再配向することを可能にする、請求項2に記載の外科システム。
【請求項5】
前記制御システムは、前記ユーザが前記ツールを前記目標位置から離して再配置することを可能にする、請求項2に記載の外科システム。
【請求項6】
前記目標状態は目標座標系を含み、前記ツールは誘導座標系を含み、前記制約力は、前記誘導座標系を前記目標座標系に誘引するように適合される、請求項1に記載の外科システム。
【請求項7】
前記誘導ハンドラは、前記現在の状態と前記目標状態との差に基づいて、1つ以上の自由度に関して前記1つ以上の仮想制約を計算する、請求項1に記載の外科システム。
【請求項8】
前記制御システムは、前記ツールを前記目標状態に誘引することに関連付けられた力及びトルクの成分を前記制約力が含むように、前記1つ以上の仮想制約を有効化するためのユーザインターフェースを備える、請求項1に記載の外科システム。
【請求項9】
前記誘導ハンドラは、前記現在の状態と前記目標状態との関係性に基づいて、前記1つ以上の仮想制約を計算する、請求項1に記載の外科システム。
【請求項10】
前記1つ以上の仮想制約のそれぞれは、チューニングパラメータの値を有し、前記誘導ハンドラは、前記現在の状態と前記目標状態との関係性に基づいて前記チューニングパラメータの値を変更する、請求項1に記載の外科システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願の相互参照
本出願は、2019年9月30日に出願された米国仮特許出願第62/908,056号に対する優先権及び全ての利益を主張し、その内容全体は、参照により本明細書に組み込まれるものとする。
続きを表示(約 3,200 文字)
【0002】
本開示は、概して、ツールの動きを誘導するためのシステム及び方法に関する。
【背景技術】
【0003】
外科システムは、ロボットマニピュレータと、マニピュレータに結合されたツールとを含み、患者に外科的処置を行い得る。ある種の外科システムは、手動動作モードでは、ユーザがツールに手動で加えた力及びトルクを感知する。外科システムは、ロボットアームを備え得るマニピュレータに指令して、感知された力及びトルクを適用することにより、ユーザが期待する動きをエミュレートするようにツールを配置する。よって、外科システムは、一般に、ユーザの意図及び期待に従ってツールを配置し、これによりユーザは、例えば所望の体積の組織を除去することができる。しかし、手動モードで目標位置及び/または目標配向にツールを正確に配置することは、ユーザには困難であり得る。従って、外科システムはまた、マニピュレータに指令して、ツールを自律的に動かして、ツールを目標位置及び/または目標配向に配置し得る。しかし、ツールを自律的に動かす場合、ツールを制御しにくいとユーザが感じる場合がある。このため、ユーザが少なくとも部分的にツールの動きに関与する手動モードが、一部のユーザに好まれ、及び/または特定の状況で好まれ得る。
【0004】
これらの課題に対処するためのシステム及び方法が当技術分野で必要とされている。
【発明の概要】
【0005】
この発明の概要は、下記の発明を実施するための形態でさらに後述される概念の精選を、簡略化された形式で紹介する。この発明の概要は、特許請求される発明の主題の範囲を制限することを意図しておらず、特許請求される発明の主題のそれぞれの重要なまたは不可欠な特徴を必ずしも特定するものではない。
【0006】
第1の態様によれば、ツールと、ツールを支持し、ユーザがツールに加えたユーザの力及びトルクに応じてツールを動かすマニピュレータとを備えた外科システムが提供される。1つ以上のセンサが、ツールに加えられた力及びトルクを測定する。制御システムは、ツールの目標状態を取得し、ツールの目標状態及び現在の状態に基づいて1つ以上の仮想制約(virtual constraint)を生成する誘導ハンドラを備える。制御システムはまた、1つ以上の仮想制約に基づいて、ツールを現在の状態から目標状態に誘引するように適合された制約力(constraint force)を計算する制約ソルバを備える。制御システムはさらに、1つ以上のセンサからの入力と、制約力とに基づいた仮想シミュレーションでツールの動きをシミュレートし、指令姿勢を出力する仮想シミュレータを備える。制御システムは、マニピュレータに指令して、ツールを指令姿勢に基づいて動かすことで、ツールを目標状態に配置するようユーザを誘導する触覚フィードバックをユーザに提供するように、構成される。
【0007】
第2の態様によれば、外科システムのマニピュレータにより支持されたツールを誘導するための方法が提供される。マニピュレータは、ユーザがツールに加えたユーザの力及びトルクに応じて、ツールを支持して動かす。方法は、ツールに加えられた力及びトルクを測定する1つ以上のセンサからの入力を受信することを含む。方法はまた、ツールの目標状態を取得することと、ツールの目標状態及び現在の状態に基づいて1つ以上の仮想制約を生成することとを含む。1つ以上の仮想制約に基づいて、ツールを現在の状態から目標状態に誘引するように適合された制約力が計算される。1つ以上のセンサからの入力と、制約力とに基づいた仮想シミュレーションで、ツールの動きがシミュレートされる。仮想シミュレーションに基づいて、指令姿勢が出力される。マニピュレータは、ツールを指令姿勢に基づいて動かすことで、ツールを目標状態に配置するようユーザを誘導する触覚フィードバックをユーザに提供するように、指令される。
【0008】
第3の態様によれば、ツールと、ツールを支持してツールを動かすマニピュレータとを備えた外科システムが提供される。マニピュレータは、マニピュレータがツール経路に沿ってツールを自律的に動かす第1のモードで動作可能であり、ユーザがツールに加えたユーザの力及びトルクに応じてマニピュレータがツールを動かす第2のモードで動作可能である。1つ以上のセンサが、ツールに加えられた力及びトルクを測定する。制御システムは、ツールの目標状態を取得し、ツールの目標状態及び現在の状態に基づいて1つ以上の仮想制約を生成する誘導ハンドラを備える。目標状態は、ツール経路外に位置する。制御システムはまた、1つ以上の仮想制約に基づいて、ツールを現在の状態から目標状態に誘引するように適合された制約力を計算する制約ソルバを備える。制御システムはさらに、1つ以上のセンサからの入力と、制約力とに基づいた仮想シミュレーションでツールの動きをシミュレートし、指令姿勢を出力する仮想シミュレータを備える。制御システムは、マニピュレータに指令して、ツールを指令姿勢に基づいて動かすことで、ツールを目標状態に配置するようユーザを誘導する触覚フィードバックをユーザに提供するように、構成される。
【0009】
第4の態様によれば、外科システムのマニピュレータにより支持されたツールを誘導するための方法が提供される。マニピュレータは、マニピュレータがツール経路に沿ってツールを自律的に動かす第1のモードで動作可能であり、ユーザがツールに加えたユーザの力及びトルクに応じてマニピュレータがツールを動かす第2のモードで動作可能である。方法は、ツールに加えられた力及びトルクを測定する1つ以上のセンサからの入力を受信することと、ツールの目標状態を取得することとを含む。方法はさらに、ツールの目標状態及び現在の状態に基づいて、1つ以上の仮想制約を生成することを含む。目標状態は、ツール経路外に位置する。1つ以上の仮想制約に基づいて、ツールを現在の状態から目標状態に誘引するように適合された制約力が計算される。1つ以上のセンサからの入力と、制約力とに基づいた仮想シミュレーションで、ツールの動きがシミュレートされる。仮想シミュレーションに基づいて、指令姿勢が出力される。マニピュレータは、ツールを指令姿勢に基づいて動かすことで、ツールを目標状態に配置するようユーザを誘導する触覚フィードバックをユーザに提供するように、指令される。
【0010】
第5の態様によれば、ツールと、マニピュレータとを備えた外科システムが提供される。マニピュレータは、マニピュレータがツール経路に沿ってツールを自律的に動かす半自律モードで動作可能であり、ツールがツール経路上にまだ存在する間にユーザがツールに加えたユーザの力及びトルクに応じて、ツールを再配向するように動作可能である。1つ以上のセンサが、ツールに加えられた力及びトルクを測定する。制御システムは、ツールの推奨配向を取得し、ツールの推奨配向及び現在の配向に基づいて1つ以上の仮想制約を生成する誘導ハンドラを備える。制御システムはまた、1つ以上の仮想制約に基づいて、ツールを現在の配向から推奨配向に誘引するように適合された制約力を計算する制約ソルバを備える。制御システムはさらに、1つ以上のセンサからの入力と、制約力とに基づいた仮想シミュレーションでツールの動きをシミュレートし、指令姿勢を出力する仮想シミュレータを備える。制御システムは、マニピュレータに指令して、ツールを指令姿勢に基づいて動かすことで、ツールを推奨配向に配置するようユーザを誘導する触覚フィードバックをユーザに提供するように、構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
短下肢装具
2か月前
個人
嚥下鍛錬装置
3か月前
個人
洗井間専家。
6か月前
個人
白内障治療法
7か月前
個人
排尿補助器具
4日前
個人
前腕誘導装置
3か月前
個人
胸骨圧迫補助具
1か月前
個人
歯の修復用材料
3か月前
個人
バッグ式オムツ
4か月前
個人
アイマスク装置
1か月前
個人
矯正椅子
4か月前
個人
ウォート指圧法
2日前
個人
汚れ防止シート
19日前
個人
ホバーアイロン
6か月前
個人
湿布連続貼り機。
2か月前
個人
陣痛緩和具
3か月前
個人
哺乳瓶冷まし容器
2か月前
三生医薬株式会社
錠剤
7か月前
個人
シャンプー
5か月前
個人
車椅子持ち上げ器
7か月前
個人
歯の保護用シール
4か月前
株式会社大野
骨壷
3か月前
株式会社コーセー
化粧料
1日前
個人
エア誘導コルセット
1か月前
個人
服薬支援装置
7か月前
個人
治療用酸化防御装置
1か月前
個人
性行為補助具
2か月前
株式会社八光
剥離吸引管
4か月前
株式会社ニデック
検眼装置
3か月前
株式会社ニデック
眼科装置
1か月前
株式会社コロナ
サウナ装置
5か月前
個人
精力増強キット
23日前
株式会社ダリヤ
皮膚化粧料
7か月前
株式会社ダリヤ
毛髪化粧料
29日前
株式会社松風
口腔用組成物
3か月前
個人
形見の製造方法
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ