TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025156586
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2025134038,2021060216
出願日
2025-08-12,2021-03-31
発明の名称
予測装置、予測方法、予測プログラム及び記憶媒体
出願人
パイオニア株式会社
代理人
個人
主分類
G06T
7/00 20170101AFI20251002BHJP(計算;計数)
要約
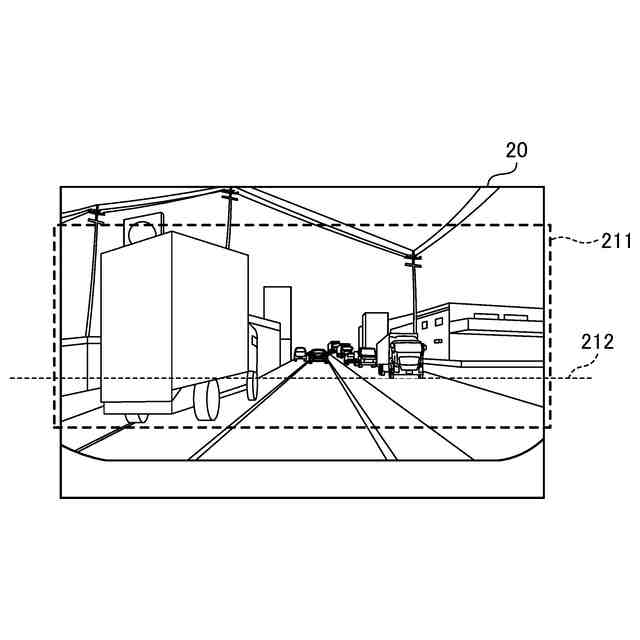
【課題】視線予測精度を悪化させることなく視覚的顕著性の演算にかかる処理負荷を低減させること。
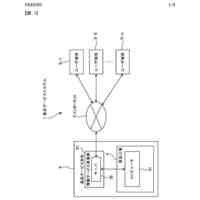
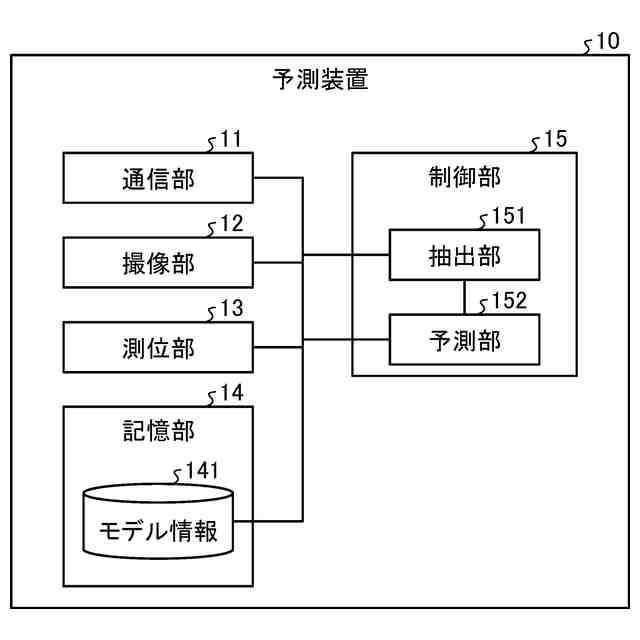
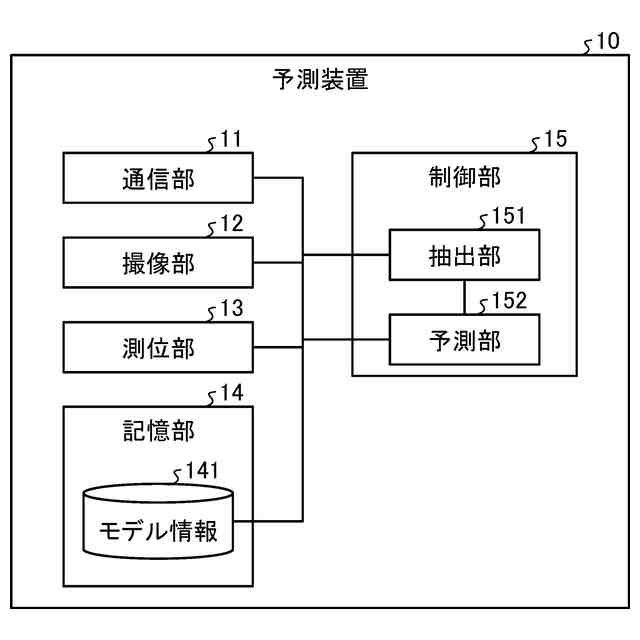
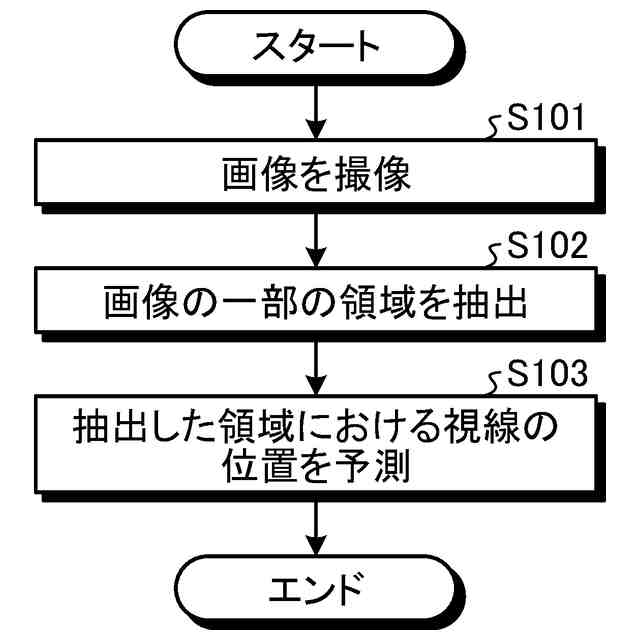
【解決手段】予測装置10の抽出部151は、移動体の運転者の視線の方向を撮影した画像から、一部の領域を抽出する。予測部152は、画像から、抽出部151によって抽出された領域における運転者の視線の位置を予測する。例えば、予測部152は、抽出部151によって抽出された領域を基に、視覚的顕著性の演算を行うことにより運転者の視線の位置を予測する。
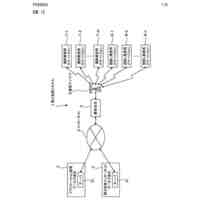
【選択図】図1
特許請求の範囲
【請求項1】
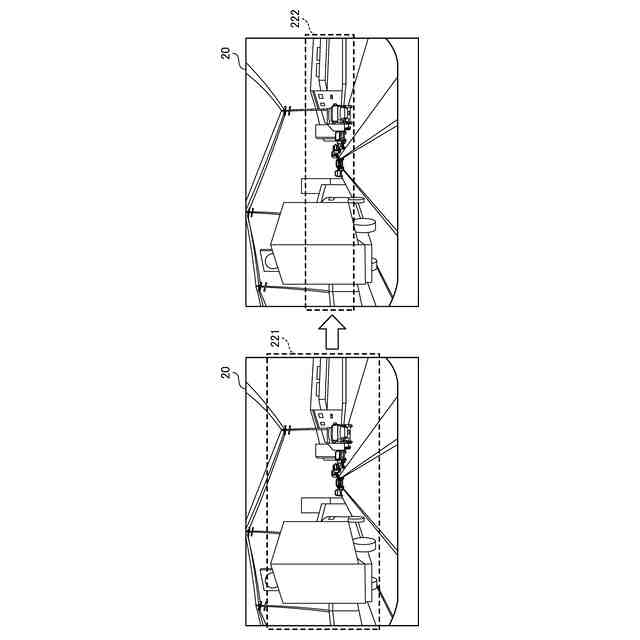
移動体の運転者の視線の方向を撮影した画像から、高さが前記画像の高さより小さい矩形の領域であって、前記移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出部と、
前記画像から、前記抽出部によって抽出された領域における前記運転者の視線の位置を予測する予測部と、
を有し、
前記抽出部は、前記画像の中心を含む領域を抽出することを特徴とする予測装置。
続きを表示(約 870 文字)
【請求項2】
前記予測部は、前記抽出部によって抽出された領域を基に、視覚的顕著性の演算を行うことにより前記運転者の視線の位置を予測することを特徴とする請求項1に記載の予測装置。
【請求項3】
前記抽出部は、横幅が前記画像の横幅と等しい前記矩形の領域を抽出することを特徴とする請求項1又は2に記載の予測装置。
【請求項4】
コンピュータによって実行される予測方法であって、
移動体の運転者の視線の方向を撮影した画像から、高さが前記画像の高さより小さい矩形の領域であって、前記移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、
前記画像から、前記抽出ステップによって抽出された領域における前記運転者の視線の位置を予測する予測ステップと、
を有し、
前記抽出ステップは、前記画像の中心を含む領域を抽出することを特徴とする予測方法。
【請求項5】
移動体の運転者の視線の方向を撮影した画像から、高さが前記画像の高さより小さい矩形の領域であって、前記移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、
前記画像から、前記抽出ステップによって抽出された領域における前記運転者の視線の位置を予測する予測ステップと、
をコンピュータに実行させ、
前記抽出ステップは、前記画像の中心を含む領域を抽出する予測プログラム。
【請求項6】
移動体の運転者の視線の方向を撮影した画像から、高さが前記画像の高さより小さい矩形の領域であって、前記移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、
前記画像から、前記抽出ステップによって抽出された領域における前記運転者の視線の位置を予測する予測ステップと、
をコンピュータに実行させ、
前記抽出ステップは、前記画像の中心を含む領域を抽出する予測プログラムを記憶したことを特徴とする記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、予測装置、予測方法、予測プログラム及び記憶媒体に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、車両の前方を写した画像から、運転者の視線の位置を推定して得られる視覚的顕著性が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2013-009825号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術には、処理負荷が大きいという問題がある。視覚的顕著性の演算に要する処理量は、演算の元となる画像のサイズに従って大きくなる。
【0005】
本発明は、上記に鑑みてなされたものであって、視線予測精度を悪化させることなく視覚的顕著性の演算にかかる処理負荷を低減させることができる予測装置、予測方法、予測プログラム及び記憶媒体を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の予測装置は、移動体の運転者の視線の方向を撮影した画像から、高さが画像の高さより小さい矩形の領域であって、移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出部と、画像から、抽出部によって抽出された領域における運転者の視線の位置を予測する予測部と、を有し、抽出部は、画像の中心を含む領域を抽出することを特徴とする。
【0007】
請求項4に記載の予測方法は、コンピュータによって実行される予測方法であって、移動体の運転者の視線の方向を撮影した画像から、高さが画像の高さより小さい矩形の領域であって、移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、画像から、抽出ステップによって抽出された領域における運転者の視線の位置を予測する予測ステップと、を有し、抽出ステップは、画像の中心を含む領域を抽出することを特徴とする。
【0008】
請求項5に記載の予測プログラムは、移動体の運転者の視線の方向を撮影した画像から、高さが画像の高さより小さい矩形の領域であって、移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、画像から、抽出ステップによって抽出された領域における運転者の視線の位置を予測する予測ステップと、をコンピュータに実行させ、抽出ステップは、画像の中心を含む領域を抽出する。
【0009】
請求項6に記載の記憶媒体は、移動体の運転者の視線の方向を撮影した画像から、高さが画像の高さより小さい矩形の領域であって、移動体の速度が大きいほど高さが小さくなる矩形の領域を抽出する抽出ステップと、画像から、抽出ステップによって抽出された領域における運転者の視線の位置を予測する予測ステップと、をコンピュータに実行させ、抽出ステップは、画像の中心を含む領域を抽出する予測プログラムを記憶したことを特徴とする。
【図面の簡単な説明】
【0010】
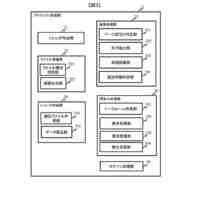
図1は、第1の実施の形態に係る予測装置の構成例を示す図である。
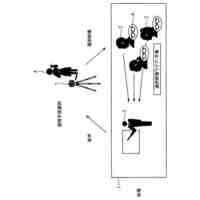
図2は、視覚的顕著性を説明する図である。
図3は、領域の抽出方法を説明する図である。
図4は、領域の抽出方法を説明する図である。
図5は、第1の実施の形態に係る予測装置の処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
詐欺保険
24日前
個人
縁伊達ポイン
24日前
個人
5掛けポイント
今日
個人
RFタグシート
11日前
個人
地球保全システム
1か月前
個人
QRコードの彩色
28日前
個人
ペルソナ認証方式
8日前
個人
情報処理装置
3日前
個人
自動調理装置
10日前
個人
表変換編集支援システム
1か月前
個人
残土処理システム
1か月前
個人
農作物用途分配システム
23日前
個人
タッチパネル操作指代替具
17日前
個人
インターネットの利用構造
7日前
個人
知的財産出願支援システム
1か月前
個人
スケジュール調整プログラム
16日前
個人
行動時間管理システム
1か月前
個人
パスワード管理支援システム
1か月前
個人
携帯端末障害問合せシステム
16日前
個人
システム及びプログラム
1か月前
個人
海外支援型農作物活用システム
1か月前
個人
食品レシピ生成システム
1か月前
株式会社キーエンス
受発注システム
1か月前
個人
エリアガイドナビAIシステム
8日前
個人
AIキャラクター制御システム
1か月前
株式会社キーエンス
受発注システム
1か月前
株式会社キーエンス
受発注システム
1か月前
トヨタ自動車株式会社
通知装置
14日前
株式会社ケアコム
項目選択装置
3日前
株式会社ワコム
電子ペン
2日前
サクサ株式会社
中継装置
1か月前
個人
未来型家系図構築システム
1か月前
個人
社会還元・施設向け供給支援構造
1か月前
個人
帳票自動生成型SaaSシステム
1か月前
個人
音声・通知・再配達UX制御構造
1か月前
エッグス株式会社
情報処理装置
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ