TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150483
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051383
出願日
2024-03-27
発明の名称
制御装置、方法及びプログラム
出願人
KDDI株式会社
代理人
個人
,
個人
主分類
G05D
1/246 20240101AFI20251002BHJP(制御;調整)
要約
【課題】地図との照合で自己位置推定を行う自律走行ロボットに対する制御装置であって、簡素に自己位置推定の安定化を図ることができる制御装置を提供する。
【解決手段】自律走行ロボットの制御装置であって、前記自律走行ロボットは、自身が計測した周辺環境の空間データを所与の地図情報と照合することによる第1測位結果に少なくとも基づいて自己位置推定を行うよう構成されており、前記第1測位結果の精度が低いと判定される場合、または、前記自己位置推定の結果が予め設定されるエリアの内部に該当する場合に、前記自身が計測した周辺環境の空間データのうち、計測精度の低下が想定されるものとして予め設定される箇所を、所与のデータに置き換えたうえで、前記所与の地図情報と照合させるよう制御する。
【選択図】図3
特許請求の範囲
【請求項1】
自律走行ロボットの制御装置であって、
前記自律走行ロボットは、自身が計測した周辺環境の空間データを所与の地図情報と照合することによる第1測位結果に少なくとも基づいて自己位置推定を行うよう構成されており、
前記第1測位結果の精度が低いと判定される場合、または、前記自己位置推定の結果が予め設定されるエリアの内部に該当する場合に、
前記自身が計測した周辺環境の空間データのうち、計測精度の低下が想定されるものとして予め設定される箇所を、所与のデータに置き換えたうえで、前記所与の地図情報と照合させるよう制御することを特徴とする制御装置。
続きを表示(約 880 文字)
【請求項2】
前記第1測位結果の精度が低いと判定される場合であって且つ前記自己位置推定の結果が予め設定されるエリアの近傍に該当する場合に、
前記自身が計測した周辺環境の空間データのうち、計測精度の低下が想定されるものとして予め設定される箇所を、所与のデータに置き換えたうえで、前記所与の地図情報と照合させるよう制御することを特徴とする請求項1に記載の制御装置
【請求項3】
前記置き換える所与のデータには、現実世界のオブジェクトであって、計測される空間データの精度が低いオブジェクトに対応するものが含まれることを特徴とする請求項1に記載の制御装置。
【請求項4】
前記置き換える所与のデータには、現実世界で対応するオブジェクトが存在しないが、前記自己位置推定のための参照データとして設定されるものが含まれることを特徴とする請求項1に記載の制御装置。
【請求項5】
前記自律走行ロボットは前記第1測位結果と、自身の移動を推定することによる第2測位結果と、に少なくとも基づいて自己位置推定を行うよう構成されていることを特徴とする請求項1に記載の制御装置。
【請求項6】
コンピュータによって実行される、自律走行ロボットの制御方法であって、
前記自律走行ロボットは、自身が計測した周辺環境の空間データを所与の地図情報と照合することによる第1測位結果に少なくとも基づいて自己位置推定を行うよう構成されており、
前記第1測位結果の精度が低いと判定される場合、または、前記自己位置推定の結果が予め設定されるエリアの内部に該当する場合に、
前記自身が計測した周辺環境の空間データのうち、計測精度の低下が想定されるものとして予め設定される箇所を、所与のデータに置き換えたうえで、前記所与の地図情報と照合させるよう制御することを特徴とする制御方法。
【請求項7】
コンピュータを請求項1ないし5のいずれかに記載の制御装置として機能させることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律移動ロボットを制御する制御装置、方法及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
自律移動ロボットを制御する従来技術の例として、特許文献1があり、自律走行ロボットが走行する通路の幅、路面の状態、通路上に存在する障害物の情報などを環境情報とし、環境情報に応じた自律走行の設定パラメータとして、速度等を設定することが開示される。
【先行技術文献】
【特許文献】
【0003】
特開2022-120505号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の従来技術では、自己位置推定が安定して適切に実現できていることを前提として、パラメータの好適な設定が行われており、自己位置推定が適切に実現できない状況への対処は考慮されていない。
【0005】
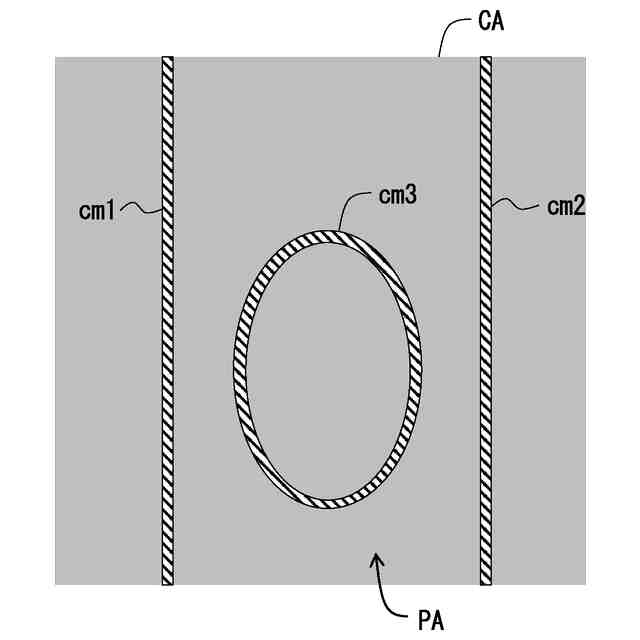
自律走行ロボットにおいては、点群等で構成される地図データと自身の周辺の空間データとを照合することで、自己位置推定が行われる。このような自己位置推定が適切に実現できなくなる状況として、通路に沿って例えば植栽が配置されており、この植栽には多数の葉が不規則な向きで配置されることで見る向きによって様々なオクルージョンが起こったり、葉に光沢があったり等で、LiDAR(光による検知と測距)等で計測される空間データにノイズが含まれたり、得られる点群として十分に密な点群が得られない、という状況がある。図1は、このような状況の例として、植栽で点群がまばらにしか計測できない例である。
【0006】
また、上記の植栽のように、点群がまばらにしか得られなかったり、ノイズが多かったりする状況以外にも、自律走行ロボットが移動する箇所が広大な広場であり、自己位置推のために計測する検出可能なオブジェクトがそもそも存在しなかったり、少なかったりすることで、自律走行ロボットの移動に困難が生じる場合もありうる。この場合にGPS(全地球測位システム)等を併用することも考えられるが、屋内等でGPSが利用できない場合があり、また、利用できたとしても、点群照合以外のGPS等の測位手段を用いることによる処理の複雑化や、測位手段の追加によるコスト増加といった問題が発生しうる。
【0007】
上記従来技術の課題に鑑み、本発明は、地図との照合で自己位置推定を行う自律走行ロボットに対する制御装置であって、簡素に自己位置推定の安定化を図ることができる制御装置を提供することを目的とする。また、当該制御装置に対応する方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、自律走行ロボットの制御装置であって、前記自律走行ロボットは、自身が計測した周辺環境の空間データを所与の地図情報と照合することによる第1測位結果に少なくとも基づいて自己位置推定を行うよう構成されており、前記第1測位結果の精度が低いと判定される場合、または、前記自己位置推定の結果が予め設定されるエリアの内部に該当する場合に、前記自身が計測した周辺環境の空間データのうち、計測精度の低下が想定されるものとして予め設定される箇所を、所与のデータに置き換えたうえで、前記所与の地図情報と照合させるよう制御することを特徴とする。また、当該制御装置に対応する方法及びプログラムであることを特徴とする。
【発明の効果】
【0009】
本発明によれば、自己位置推定の精度の低下が想定される箇所や、実際に低下する箇所において、計測した周辺環境の空間データを所与のデータに置き換えたうえで地図と照合させることにより、簡素に自己位置推定の安定化を図ることができる。
【図面の簡単な説明】
【0010】
課題例として、点群がまばらにしか計測できない例を示す図である。
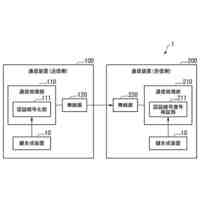
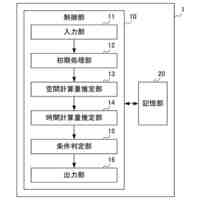
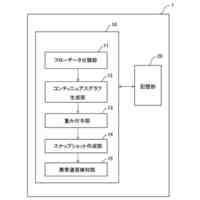
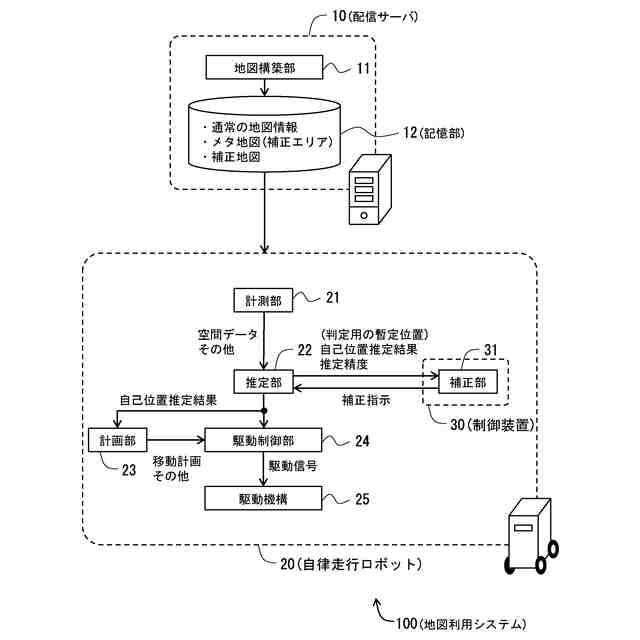
実施形態に係る地図利用システムの構成図である。
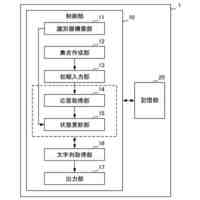
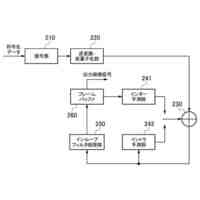
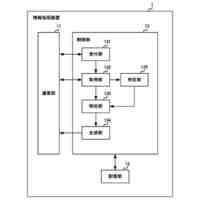
実施形態に係る地図利用システムの機能ブロック図である。
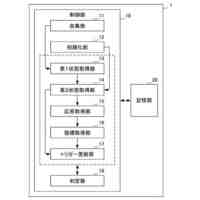
実施形態に係る地図利用システムの動作のフローチャートである。
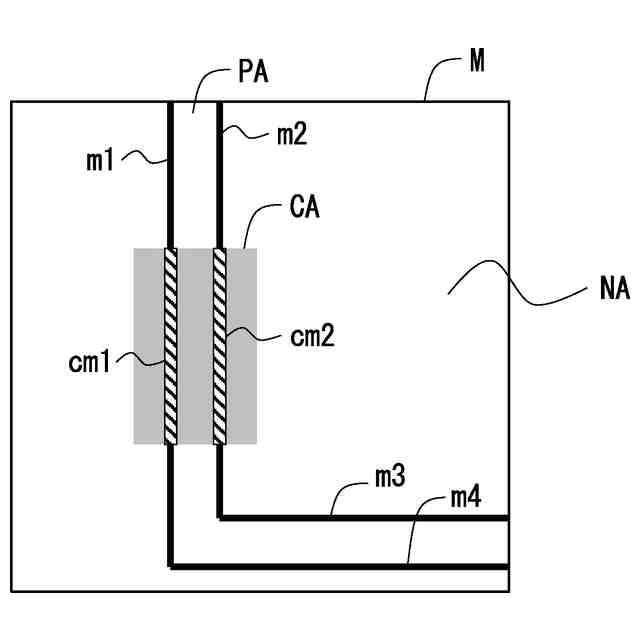
構築される地図を模式的に示す図である。
補正部による補正処理を伴う際の推定部での自己位置推定の仕方を説明するための模式図である。
補正地図データは、現実世界のオブジェクトとの対応の有無を問わず設定可能であり、効果を奏することを説明するための模式例を示す図である。
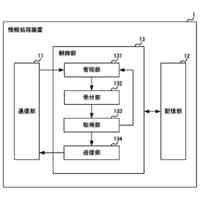
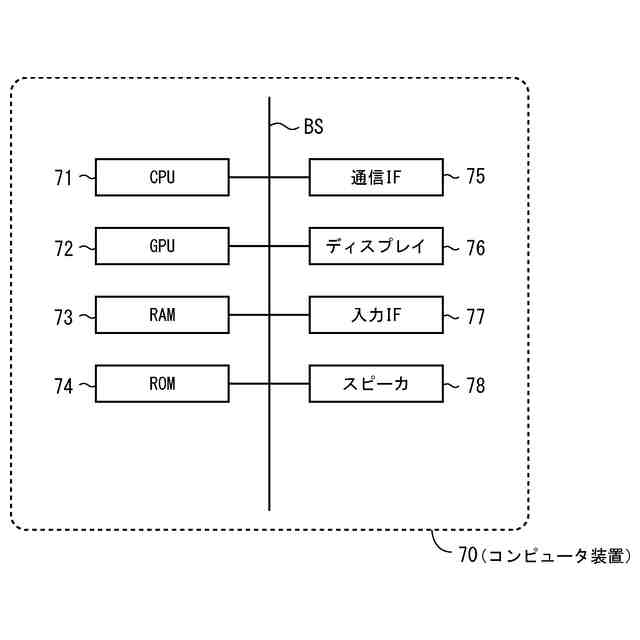
一般的なコンピュータにおけるハードウェア構成の例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
KDDI株式会社
無線デバイス及びプログラム
24日前
KDDI株式会社
評価装置、評価方法及び評価プログラム
24日前
KDDI株式会社
ログ処理装置、端末、方法及びプログラム
1か月前
KDDI株式会社
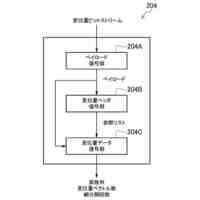
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
9日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
定量化装置、定量化方法及び定量化プログラム
1か月前
KDDI株式会社
通信装置、通信方法及びコンピュータプログラム
3日前
KDDI株式会社
鍵生成装置、鍵生成方法及びコンピュータプログラム
3日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
安全性評価装置、安全性評価方法及び安全性評価プログラム
3日前
KDDI株式会社
画像復号装置、画像復号方法、プログラム及び画像符号化装置
1か月前
KDDI株式会社
トリガー判定装置、トリガー判定方法及びトリガー判定プログラム
1か月前
KDDI株式会社
不正文字列探索装置、不正文字列探索方法及び不正文字列探索プログラム
1か月前
KDDI株式会社
動的グラフによる異常通信検知装置、異常通信検知方法、及び異常通信検知プログラム
4日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
キャリアアグリゲーションのScellにおけるOn demand SSBを効率的に運用するための端末装置、基地局装置、制御方法、及びプログラム
1か月前
三井住友建設株式会社
通信システム及び建設方法
16日前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
愛知製鋼株式会社
車両用システム
2か月前
ローム株式会社
基準電圧源
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
株式会社クボタ
作業車
24日前
新電元工業株式会社
作業用ロボット
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ