TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025142667
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042155
出願日
2024-03-18
発明の名称
遠隔操作システム
出願人
トヨタ自動車株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/16 20060101AFI20250924BHJP(信号)
要約
【課題】移動体の遠隔操作においてより適切に遅延補償を行うこと。
【解決手段】移動体の遠隔操作のための遠隔操作システムは、移動体と遠隔オペレータ端末との間の通信遅延を補償する遅延補償処理を実行する。遅延補償処理は、移動体に搭載されたカメラによって撮影される画像に対して行われる第1遅延補償処理と、遠隔オペレータによる操作量を反映した遠隔操作情報に対して行われる第2遅延補償処理と、を含む。第1遅延補償処理は、カメラによって撮影される第1画像に射影変換処理を適用することによって第2画像を生成し、第2画像を遠隔オペレータ端末の表示装置に表示する。第2遅延補償処理は、遠隔操作情報の遅延補償を行うことによって遅延補償操作情報を取得し、遅延補償操作情報に従って移動体を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
遠隔オペレータによる移動体の遠隔操作のための遠隔操作システムであって、
前記移動体と前記遠隔オペレータ側の遠隔オペレータ端末との間の通信遅延を補償する遅延補償処理を実行する1又は複数の制御装置を備え、
前記遅延補償処理は、
前記移動体に搭載されたカメラによって撮影される画像に対して行われる第1遅延補償処理と、
前記遠隔オペレータによる操作量を反映した遠隔操作情報に対して行われる第2遅延補償処理と
を含み、
前記第1遅延補償処理は、
前記カメラによって第1タイミングに撮影される第1画像を取得することと、
前記第1画像に射影変換処理を適用することによって、前記第1タイミングよりも第1遅延補償時間だけ後の第2タイミングにおける前記カメラの視点から見た第2画像を生成することと、
前記第2画像を前記遠隔オペレータ端末の表示装置に表示することと
を含み、
前記第2遅延補償処理は、
第2遅延補償時間の分だけ前記遠隔操作情報の遅延補償を行うことによって遅延補償操作情報を取得することと、
前記遅延補償操作情報に従って前記移動体を制御することと
を含む
遠隔操作システム。
続きを表示(約 600 文字)
【請求項2】
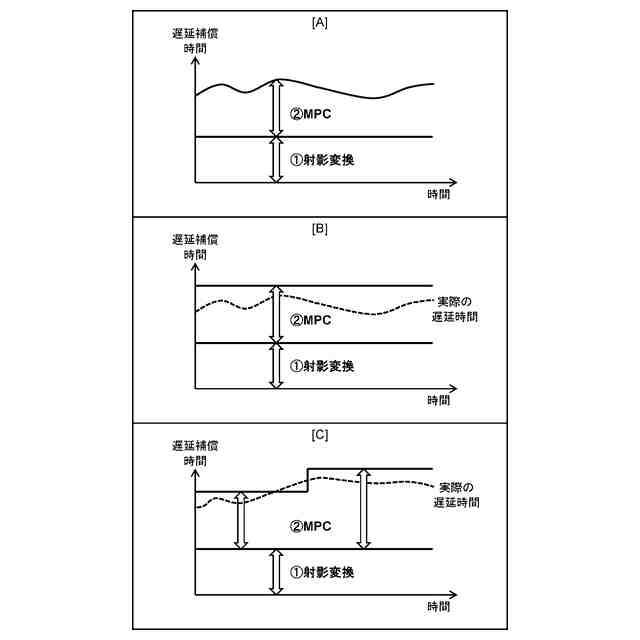
前記1又は複数の制御装置は、更に、前記第1遅延補償時間と前記第2遅延補償時間の比率を動的に変更するように構成された
請求項1に記載の遠隔操作システム。
【請求項3】
前記1又は複数の制御装置は、更に、前記第1遅延補償時間が減少するにつれて前記第2遅延補償時間が増加するように、前記第1遅延補償時間と前記第2遅延補償時間を設定するように構成された
請求項2に記載の遠隔操作システム。
【請求項4】
前記1又は複数の制御装置は、更に、
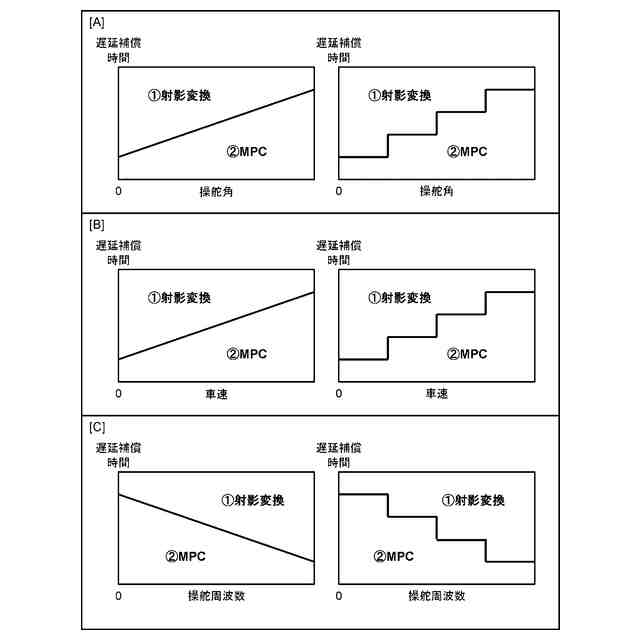
前記遠隔オペレータによる操舵操作の操舵角の増加に伴い、前記第1遅延補償時間を減少させ、前記第2遅延補償時間を増加させる第1処理と、
前記移動体の速度の増加に伴い、前記第1遅延補償時間を減少させ、前記第2遅延補償時間を増加させる第2処理と、
前記遠隔オペレータによる操舵操作の操舵周波数の増加に伴い、前記第1遅延補償時間を増加させ、前記第2遅延補償時間を減少させる第3処理と
のうち少なくとも1つを実行するように構成された
請求項2に記載の遠隔操作システム。
【請求項5】
前記1又は複数の制御装置は、更に、前記第1遅延補償時間と前記第2遅延補償処理の少なくとも一方を固定するように構成された
請求項1に記載の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、遠隔オペレータによる移動体の遠隔操作に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
車両の遠隔操作では、車載カメラによって撮影される画像(映像)が、車両から遠隔オペレータ端末に送信され、遠隔オペレータ端末の表示装置に表示される。このとき、車両と遠隔オペレータ端末との間の通信遅延を補償することが望まれる。
【0003】
特許文献1は、遠隔映像出力装置を開示している。遠隔映像出力装置は、自動運転車両から送信される映像を受信し、また、通信遅延時間に応じて自動運転車両の視点の位置変化を推定する。遠隔映像出力装置は、自動運転車両の視点の位置変化を考慮して、受信映像のフレームから一部の範囲を切り出し、切り出した範囲の映像を表示する。
【0004】
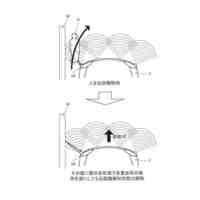
非特許文献1は、射影変換を利用した遅延補償技術を開示している。より詳細には、当該遅延補償技術は、車両から受け取る画像に対して射影変換を行い、遅延時間分の車両移動量に応じて視点を変更することによって、遅延補償を行う。言い換えれば、当該遅延補償技術は、遅延時間だけ先の視点から見たカメラ映像を先読みすることによって、視覚的に遅延補償を行う。
【先行技術文献】
【特許文献】
【0005】
国際公開第2018/155159号
【非特許文献】
【0006】
松原航大,大前学,「投影変換による自動車の遠隔操作用カメラ映像の遅延補償に関する研究」,第19回ITSシンポジウム2021,4-A-12, 2021年12月
【発明の概要】
【発明が解決しようとする課題】
【0007】
移動体の遠隔操作において、遠隔オペレータに提示される画像に対して遅延補償を行うことが考えられる。例えば非特許文献1に開示された技術により遅延補償が可能である。しかしながら、車両の変位量が大きくなると、射影変換により得られる変換後画像の歪みも大きくなる。変換後画像の歪みが大きすぎると、遠隔オペレータは変換後画像に基づいて移動体の周囲の状況を把握しづらくなる。
【課題を解決するための手段】
【0008】
本開示の1つの観点は、遠隔オペレータによる移動体の遠隔操作のための遠隔操作システムに関連する。
遠隔操作システムは、移動体と遠隔オペレータ側の遠隔オペレータ端末との間の通信遅延を補償する遅延補償処理を実行する1又は複数の制御装置を備える。
遅延補償処理は、移動体に搭載されたカメラによって撮影される画像に対して行われる第1遅延補償処理と、遠隔オペレータによる操作量を反映した遠隔操作情報に対して行われる第2遅延補償処理と、を含む。
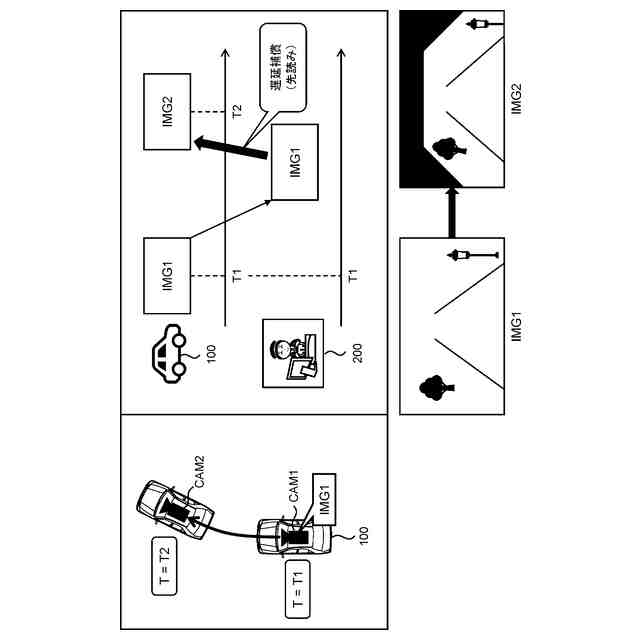
第1遅延補償処理は、カメラによって第1タイミングに撮影される第1画像を取得することと、第1画像に射影変換処理を適用することによって、第1タイミングよりも第1遅延補償時間だけ後の第2タイミングにおけるカメラの視点から見た第2画像を生成することと、第2画像を遠隔オペレータ端末の表示装置に表示することと、を含む。
第2遅延補償処理は、第2遅延補償時間の分だけ遠隔操作情報の遅延補償を行うことによって遅延補償操作情報を取得することと、遅延補償操作情報に従って移動体を制御することと、を含む。
【発明の効果】
【0009】
第1遅延補償処理と第2遅延補償処理の組み合わせることより、第1遅延補償処理と第2遅延補償処理のそれぞれの得手・不得手を相補うことが可能となる。その結果、遅延補償処理全体としての精度と安定性が向上する。このことは、遠隔オペレータOによる遠隔操作の精度と安定性の向上につながる。
【図面の簡単な説明】
【0010】
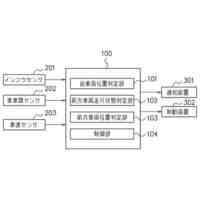
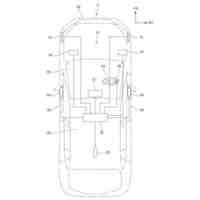
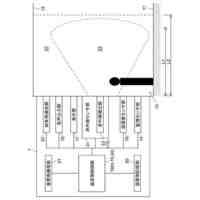
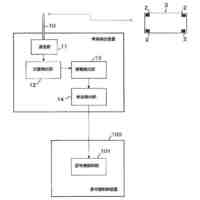
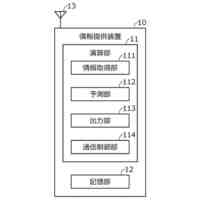
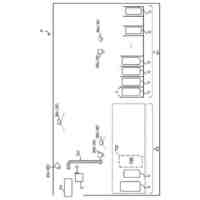
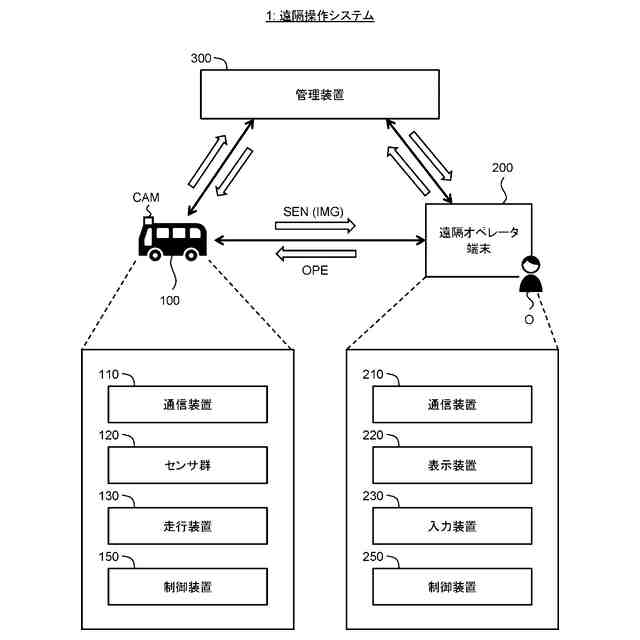
遠隔操作システムの構成例を示す概略図である。
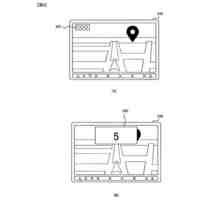
第1遅延補償処理の概要を説明するための概念図である。
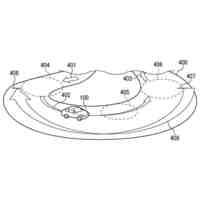
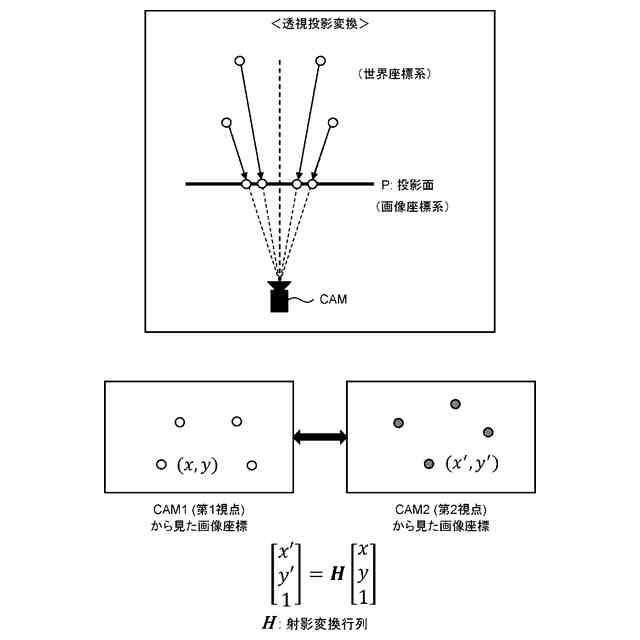
透視投影変換に基づく射影変換を説明するための概念図である。
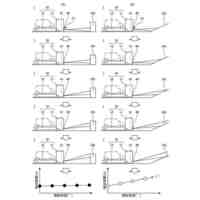
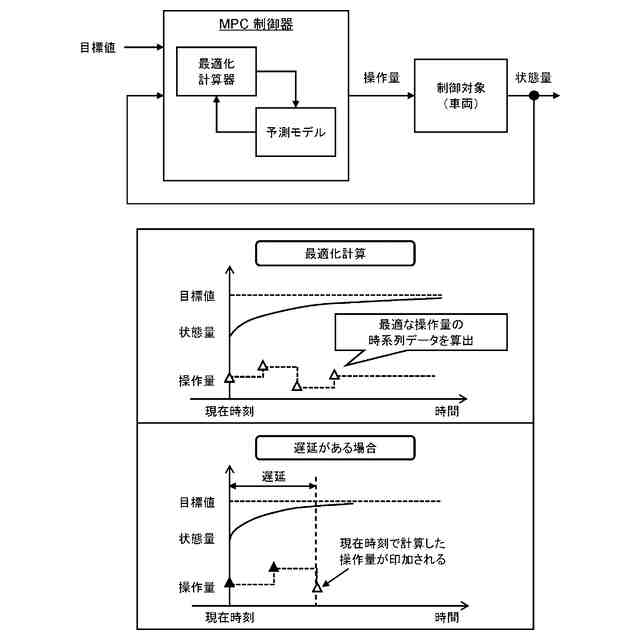
第2遅延補償処理の一例を説明するための概念図である。
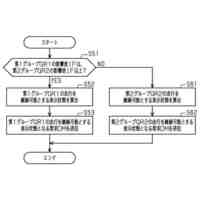
第1遅延補償処理と第2遅延補償処理の組み合わせの様々な例を示す。
第1遅延補償処理と第2遅延補償処理の組み合わせの様々な例を示す。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
警報システム
1か月前
個人
自動電動車椅子
19日前
スズキ株式会社
運転支援装置
1か月前
エムケー精工株式会社
車両誘導装置
1か月前
ニッタン株式会社
検知器
29日前
ニッタン株式会社
検知器
27日前
個人
磁気路上での車両の路線離脱防御
8日前
ニッタン株式会社
検知器
27日前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
発信機
2か月前
ニッタン株式会社
検知器
5日前
株式会社国際電気
防災システム
1か月前
トヨタ自動車株式会社
車両
2か月前
株式会社SUBARU
運転支援装置
6日前
株式会社小糸製作所
移動体検出装置
29日前
日本信号株式会社
異常走行検出装置
12日前
大阪瓦斯株式会社
音声出力システム
4日前
トヨタ自動車株式会社
サーバ
12日前
三菱自動車工業株式会社
制御システム
4日前
株式会社CCT
通信装置及び表示方法
5日前
日本精機株式会社
報知装置及び報知システム
18日前
株式会社小糸製作所
車両検出システム
29日前
能美防災株式会社
火災感知器
1か月前
本田技研工業株式会社
情報提供装置
2か月前
能美防災株式会社
非常伝達装置
1か月前
ヨシモトポール株式会社
接近報知システム
1か月前
本田技研工業株式会社
運転評価装置
2か月前
ホーチキ株式会社
火災検出システム
今日
本田技研工業株式会社
物体検出装置
1か月前
本田技研工業株式会社
情報提供装置
2か月前
株式会社豊田中央研究所
注意喚起装置
20日前
本田技研工業株式会社
保険料算出装置
2か月前
シャープ株式会社
駐車制御装置
11日前
パイオニア株式会社
情報処理装置
8日前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
株式会社アイシン
運転支援装置
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ