TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025140829
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040429
出願日
2024-03-14
発明の名称
車両制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01C
21/28 20060101AFI20250919BHJP(測定;試験)
要約
【課題】複数の自己位置情報を状況に応じて効果的に、自己位置推定に利用することができる車両制御装置を提供することができる車両の制御装置を提供する。
【解決手段】本発明に係る車両制御装置は、自車両の位置を示す複数の自己位置情報に基づいて、前記自車両の位置を推定する自己位置推定手段と、前記自己位置情報の信頼度に応じて、前記自己位置情報に対する重みを設定する設定手段と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
自車両の位置を示す複数の自己位置情報に基づいて、前記自車両の位置を推定する自己位置推定手段と、
前記自己位置情報の信頼度に応じて、前記自己位置情報に対する重みを設定する設定手段と、を備え、
前記自己位置推定手段は、前記設定手段が設定した重みを用いて前記自車両の位置を推定する、車両制御装置。
続きを表示(約 220 文字)
【請求項2】
前記設定手段は、前記自己位置情報の信頼度が低いと評価した場合に、前記自己位置情報に対する重みを減少させる、
請求項1に記載の車両制御装置。
【請求項3】
前記設定手段は、前記自己位置情報に対する重みを減少させた後で、前記自己位置情報の信頼度を繰り返し評価し、所定の回数だけ連続して前記信頼度が高いと評価した場合は、前記自己位置情報に対する重みを増加させる、
請求項2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、車両をユーザの運転操作によらずに走行させる自動運転について研究が進められている。自動運転の制御では、例えば、車両に搭載されたライダ(LiDAR:Light Detection And Ranging)から取得される点群データと、高精度地図のデータである高精度地図データ(点群データ)とをマッチングさせて、自車両の位置(自己位置)を推定する車両制御装置に関する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-32069号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自車両の位置を推定する情報としては、上記の点群データのマッチングで求めたもの以外にも、GPS(Global Positioning System)受信機が受信した測位信号に基づくものや、道路の白線を検知して得られるもの等の複数の自己位置情報が利用可能である。従って、これら複数の自己位置情報を状況に応じて効果的に、自己位置推定に利用することが求められる。
【0005】
本発明の目的は、上述の課題に鑑みてなされたものであって、複数の自己位置情報を状況に応じて効果的に用いることで、より適切に自己位置推定をすることができる車両制御装置を提供することである。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明に係る車両制御装置は、自車両の位置を示す複数の自己位置情報に基づいて、前記自車両の位置を推定する自己位置推定手段と、前記自己位置情報の信頼度に応じて、前記自己位置情報に対する重みを設定する設定手段と、を備える。
【発明の効果】
【0007】
本発明によれば、複数の自己位置情報を状況に応じて効果的に用いることで、より適切に自己位置推定をすることができる。
【図面の簡単な説明】
【0008】
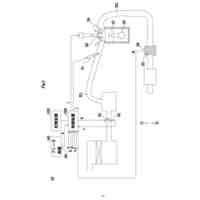
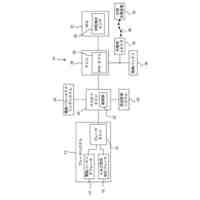
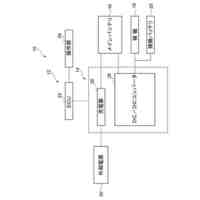
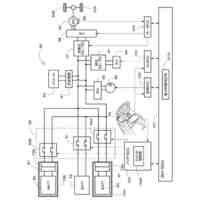
図1は、実施形態に係る車両制御装置が搭載される車両のシステム構成の一例を示すブロック図である。
図2は、実施形態に係る車両の自動運転ECUの機能構成の一例を示すブロック図である。
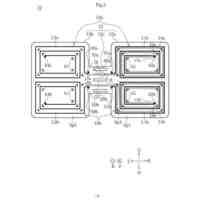
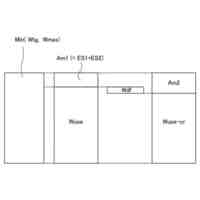
図3は、複数の自己位置情報を統合して推定された自己位置を出力する処理の模式図である。
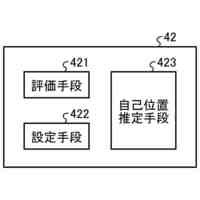
図4は、実施形態に係る自己位置推定部42の機能構成の一例を示すブロック図である。
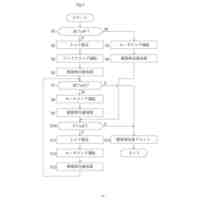
図5は、複数の自己位置情報と重みから自己位置を推定する処理全体の手順を示すフローチャートである。
図6は、n番目の自己位置情報Pnに対応する重みWnを設定する処理の手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について図面を参照して説明する。以下に記載する実施形態の構成、並びに当該構成によってもたらされる作用及び効果は一例であって、本発明は以下の記載内容に限定されるものではない。
【0010】
図1は、実施形態に係る車両制御装置が搭載される車両1のシステム構成の一例を示すブロック図である。車両1は、自動運転機能を搭載しており、ユーザ(運転者)の運転操作によらない自動運転による走行が可能である。なお、自動運転には、車両1の走行における操作の一部が自動化された(ユーザによる部分的な運転操作を要する)半自動運転が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ダイハツ工業株式会社
車両
21日前
ダイハツ工業株式会社
内燃機関
23日前
ダイハツ工業株式会社
電池装置
1か月前
ダイハツ工業株式会社
制御装置
20日前
ダイハツ工業株式会社
制御装置
20日前
ダイハツ工業株式会社
制御装置
20日前
ダイハツ工業株式会社
測定用具
26日前
ダイハツ工業株式会社
車両制御装置
2日前
ダイハツ工業株式会社
車両制御装置
2日前
ダイハツ工業株式会社
車両制御装置
5日前
ダイハツ工業株式会社
車両制御装置
5日前
ダイハツ工業株式会社
車両制御装置
5日前
ダイハツ工業株式会社
樹脂成形用金型
1か月前
ダイハツ工業株式会社
トランスファー装置
1か月前
ダイハツ工業株式会社
二酸化炭素分解装置
21日前
ダイハツ工業株式会社
一酸化炭素製造システム
12日前
ダイハツ工業株式会社
樹脂製アウタパネル部材
今日
ダイハツ工業株式会社
ハイブリッド車両用制御装置
2日前
ダイハツ工業株式会社
車両における電力の制御方法
22日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
電動車両
21日前
トヨタ自動車株式会社
電気自動車
21日前
トヨタ自動車株式会社
バッテリケース
21日前
トヨタ自動車株式会社
バッテリ搭載構造
21日前
トヨタ自動車株式会社
バッテリ搭載構造
21日前
トヨタ自動車株式会社
バッテリパックの搭載構造及び電気自動車
21日前
個人
計量スプーン
22日前
個人
微小振動検出装置
1か月前
株式会社イシダ
X線検査装置
1か月前
日本精機株式会社
位置検出装置
今日
日本精機株式会社
位置検出装置
今日
日本精機株式会社
位置検出装置
今日
株式会社辰巳菱機
システム
1か月前
大和製衡株式会社
組合せ秤
5日前
大和製衡株式会社
組合せ秤
5日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ