TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138277
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037280
出願日
2024-03-11
発明の名称
移動体監視装置、移動体監視方法及び移動体監視プログラム
出願人
三菱電機インフォメーションシステムズ株式会社
代理人
弁理士法人クロスボーダー特許事務所
主分類
B61L
25/02 20060101AFI20250917BHJP(鉄道)
要約
【課題】照明の変化がある場合及び夜間の暗闇においても、移動体が存在しているか否かを適切に判定可能にする。
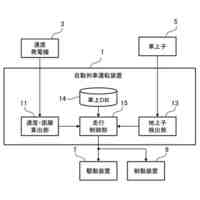
【解決手段】点群取得部21は、検知エリアに対して光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する。差分特定部23は、検知エリアに移動体がいない状態で取得された点群データである背景点群データと、監視期間に取得された点群データとの差分である監視差分を特定する。移動体判定部25は、移動体が移動する移動エリアに含まれる監視差分によって、移動体が存在するか否かを判定する。
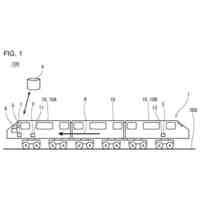
【選択図】図1
特許請求の範囲
【請求項1】
検知エリアに対して光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する点群取得部と、
前記検知エリアに移動体がいない状態で前記点群取得部によって取得された点群データである背景点群データと、前記点群取得部によって監視期間に取得された点群データとの差分である監視差分を特定する差分特定部と、
前記検知エリアにおいて前記移動体が移動する移動エリアに含まれる、前記差分特定部によって特定された前記監視差分によって、前記検知エリアに前記移動体が存在するか否かを判定する移動体判定部と
を備える移動体監視装置。
続きを表示(約 2,000 文字)
【請求項2】
前記差分特定部は、前記背景点群データと、前記点群取得部によって設定期間に取得された複数の点群データそれぞれとの差分である設定差分を特定し、
前記移動体監視装置は、さらに、
前記複数の点群データそれぞれについての前記設定差分から、移動体の移動エリアを特定する移動エリア特定部
を備え、
前記移動体判定部は、前記移動エリア特定部によって特定された前記移動エリアを用いて、前記移動体が存在するか否かを判定する
請求項1に記載の移動体監視装置。
【請求項3】
前記移動エリア特定部は、前記複数の点群データそれぞれについての前記設定差分に含まれる点の数が、単位領域当たりに基準数以上ある多点領域を前記移動エリアとして特定する
請求項2に記載の移動体監視装置。
【請求項4】
前記移動エリア特定部は、前記多点領域と地面との間の範囲を前記移動エリアとして特定する
請求項3に記載の移動体監視装置。
【請求項5】
前記移動エリア特定部は、
前記設定期間から切り出された各基準期間を対象期間とし、前記対象期間に取得された複数の点群データのうち最後に取得された点群データを除いた点群データそれぞれを対象の点群データとして、前記対象の点群データから特定された前記設定差分を用いて検知された第1物体と、時系列において前記対象の点群データの次の点群データから特定された前記設定差分を用いて検知された第2物体との移動方向の差が基準差以内である場合に、前記対象期間に前記移動体が出現していると判定する出現判定部と、
前記出現判定部によって前記物体が前記移動体であると判定された期間に取得された点群データから特定された前記設定差分に含まれる点群を蓄積する点群蓄積部と、
前記点群蓄積部によって蓄積された点群をクラスタリングして前記移動エリアを特定するエリア特定部と
を備える請求項2に記載の移動体監視装置。
【請求項6】
前記出現判定部は、前記第1物体の検知領域と前記第2物体の検知領域との間の距離が基準距離以内である場合に、前記対象期間に前記移動体が出現していると判定する
請求項5に記載の移動体監視装置。
【請求項7】
前記移動体監視装置は、さらに、
前記点群データの各点を対象の点として、前記検知エリアを分割した複数のボクセルのうち対象の点の位置が含まれるボクセルに対象の点を対応付けることにより、前記点群データに対応するボクセルデータを生成するボクセル化部
を備え、
前記差分特定部は、前記複数のボクセルそれぞれについて、対応付けされた点の有無に基づき、前記ボクセル化部によって前記背景点群データから生成された前記ボクセルデータと、前記ボクセル化部によって前記監視期間に取得された点群データから生成された前記ボクセルデータとで差分がある差分セルを前記監視差分として特定する
請求項1に記載の移動体監視装置。
【請求項8】
前記移動体監視装置は、さらに、
前記移動体判定部によって判定された結果を、前記移動体の有無に応じて物体の監視をするか否かを切り替える物体監視装置に通知する通知部
を備える請求項1に記載の移動体監視装置。
【請求項9】
コンピュータが、検知エリアに対して光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得し、
コンピュータが、前記検知エリアに移動体がいない状態で取得された点群データである背景点群データと、監視期間に取得された点群データとの差分である監視差分を特定し、
コンピュータが、前記検知エリアにおいて前記移動体が移動する移動エリアに含まれる前記監視差分によって、前記検知エリアに前記移動体が存在するか否かを判定する移動体監視方法。
【請求項10】
検知エリアに対して光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する点群取得処理と、
前記検知エリアに移動体がいない状態で前記点群取得処理によって取得された点群データである背景点群データと、前記点群取得処理によって監視期間に取得された点群データとの差分である監視差分を特定する差分特定処理と、
前記検知エリアにおいて前記移動体が移動する移動エリアに含まれる、前記差分特定処理によって特定された前記監視差分によって、前記検知エリアに前記移動体が存在するか否かを判定する移動体判定処理と
を行う移動体監視装置としてコンピュータを機能させる移動体監視プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、列車又は車といった移動体が存在するか否かを判定する技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
移動体が存在するか否かに応じて制御を変更するシステムがある。
例えば、踏切での列車との衝突事故を防止するためのシステムでは、踏切付近に列車が近づいている場合にはオンになり、踏切付近に列車がいない場合にはオフになることが考えられる。また、路面電車の電停又はバス停の不審物を検知するシステムでは、電停に路面電車が近づいていない又はバス停にバスが近づいていない場合にはオンになり、電停に路面電車がいる又はバス停にバスがいる場合にはオフになることが考えられる。
【0003】
カメラで得られた画像データを用いて、検知エリアに移動体が存在するか否かを判定する技術がある(特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2004-042777号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
カメラで得られた画像データを用いた場合には、照明の変化により誤検知が発生する恐れがあるという課題がある。また、夜間の暗闇では、検知が困難になるという課題がある。
本開示は、照明の変化がある場合及び夜間の暗闇においても、移動体が存在しているか否かを適切に判定可能にすることを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る移動体監視装置は、
検知エリアに対して光を照射して反射点で反射した反射光を受信することにより得られた点群データを取得する点群取得部と、
前記検知エリアに移動体がいない状態で前記点群取得部によって取得された点群データである背景点群データと、前記点群取得部によって監視期間に取得された点群データとの差分である監視差分を特定する差分特定部と、
前記移動体が移動する移動エリアに含まれる、前記差分特定部によって特定された前記監視差分によって、前記移動体が存在するか否かを判定する移動体判定部と
を備える。
【発明の効果】
【0007】
本開示では、点群データを用いて移動体が存在するか否かを判定する。これにより、照明の変化がある場合及び夜間の暗闇においても、移動体が存在しているか否かを適切に判定可能にすることができる。
特に、本開示では、移動エリアに含まれる監視差分によって、移動体が存在するか否かを判定する。点群データを用いた処理では、画像データを用いた処理に比べて計算量が大きくなる傾向がある。しかし、検知エリア全体についての点群データから移動体を検知するのではなく、移動エリアに含まれる監視差分を用いて移動体が存在しているか否かを判定するため、計算量を抑えることが可能である。
【図面の簡単な説明】
【0008】
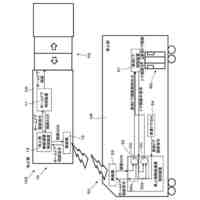
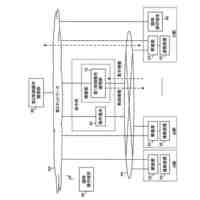
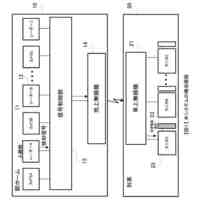
実施の形態1に係る移動体監視装置10の構成図。
実施の形態1に係る移動体監視装置10の全体的な処理のフローチャート。
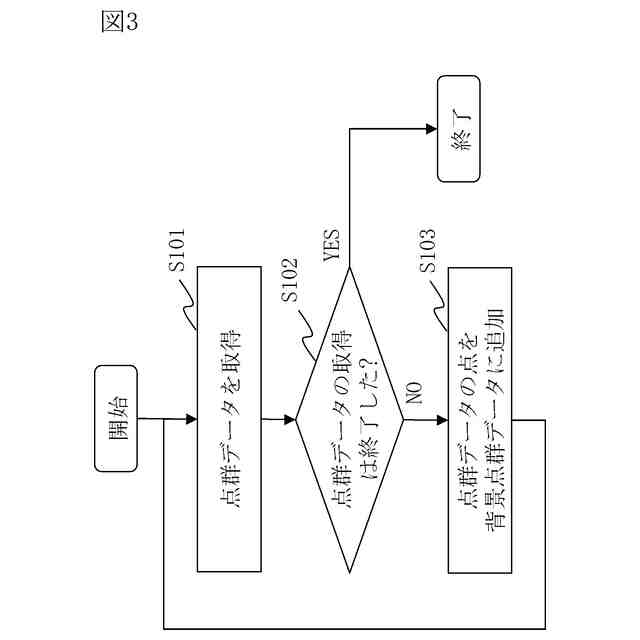
実施の形態1に係る背景点群生成処理のフローチャート。
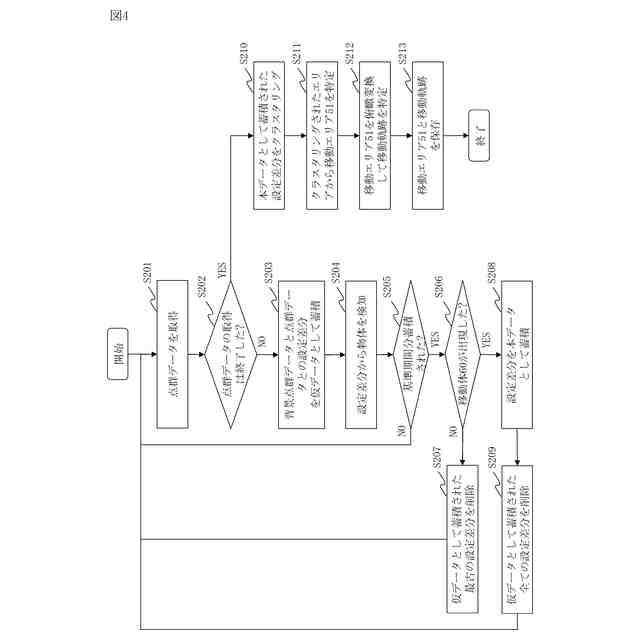
実施の形態1に係る移動エリア特定処理のフローチャート。
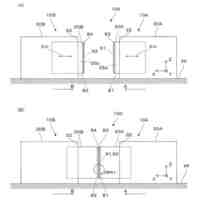
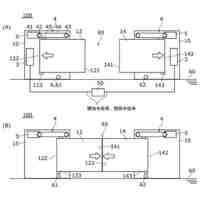
実施の形態1に係る出現判定処理の説明図。
実施の形態1に係るエリア選定処理の説明図。
実施の形態1に係る移動体判定処理のフローチャート。
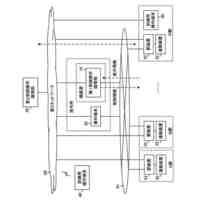
実施の形態2に係る移動体監視装置10の構成図。
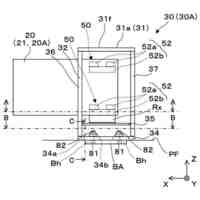
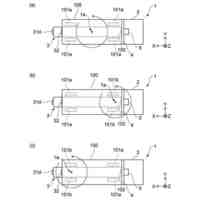
実施の形態2に係るボクセル定義31の説明図。
実施の形態2に係るボクセルデータの生成方法の説明図。
実施の形態2に係る背景点群生成処理のフローチャート。
実施の形態2に係る移動エリア特定処理のフローチャート。
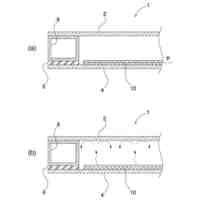
実施の形態2に係る差分特定処理の説明図。
実施の形態2に係る移動体判定処理のフローチャート。
変形例3に係る差分特定処理の説明図。
【発明を実施するための形態】
【0009】
実施の形態1.
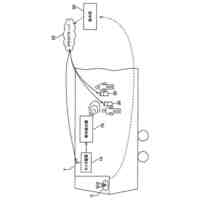
実施の形態1に係る移動体監視装置10は、検知エリア50に移動体60が存在するか否かを判定する。移動体60は、列車と車両と航空機と等である。検知エリア50は、移動体60が列車の場合には、踏切のエリアと踏切付近の線路エリアと等である。検知エリア50は、移動体60が車両の場合には、バス停のエリアと交差点のエリアと等である。検知エリア50は、移動体60が航空機の場合には、滑走路付近のエリアと、駐機エリアと等である。
実施の形態1では、移動体60が列車の場合を例として説明する。
【0010】
***構成の説明***
図1を参照して、実施の形態1に係る移動体監視装置10の構成を説明する。
移動体監視装置10は、コンピュータである。
移動体監視装置10は、プロセッサ11と、メモリ12と、ストレージ13と、通信インタフェース14とのハードウェアを備える。プロセッサ11は、信号線を介して他のハードウェアと接続され、これら他のハードウェアを制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本信号株式会社
ホーム柵
1か月前
日本信号株式会社
ホーム柵
1か月前
近畿車輌株式会社
耐火床構造
15日前
日本車輌製造株式会社
鉄道車両
7日前
日本信号株式会社
列車接近警報装置
2か月前
ナブテスコ株式会社
ホームドア装置
2か月前
株式会社東芝
台車搬送装置
11日前
日本信号株式会社
ホームドア制御装置
3か月前
日本ケーブル株式会社
索道の支索引留め装置
2か月前
株式会社日立製作所
鉄道車両
19日前
オークラ輸送機株式会社
無人搬送車
15日前
日本車輌製造株式会社
車両用ヒップレスト
1か月前
日本信号株式会社
自動列車運転装置
2か月前
株式会社京三製作所
可動式ホーム柵
15日前
株式会社京三製作所
運行管理システム
2か月前
株式会社京三製作所
運行管理システム
2か月前
日本信号株式会社
ホーム柵及び駆動機構の調整方法
1か月前
日本製鉄株式会社
鉄道車両用の台車
7日前
日本信号株式会社
ホーム柵及びホーム柵の設置方法
19日前
日本信号株式会社
遮断機監視装置及び遮断機監視方法
3か月前
村田機械株式会社
走行車システム
5日前
株式会社デンソーウェーブ
停車位置検知システム
3か月前
株式会社京三製作所
地上システム及び車上装置
1か月前
光永産業株式会社
軌条運搬台車、および軌条運搬装置
3か月前
日本製鉄株式会社
鉄道用安全確認支援システム
2か月前
株式会社国際電気
駅ホーム監視システム及び駅ホーム監視方法
1か月前
大同信号株式会社
踏切しゃ断機の電源再投入装置
25日前
コイト電工株式会社
鉄道車両用情報通信システム
2か月前
日本車輌製造株式会社
無人搬送台車における片線誘導システム
3か月前
株式会社高見沢サイバネティックス
ホームドア装置
4日前
Astemo株式会社
バルブ装置
3か月前
三菱重工業株式会社
軌道系交通システム
11日前
日本車輌製造株式会社
鉄道車両
5日前
日本車輌製造株式会社
鉄道車両
2か月前
日本車輌製造株式会社
鉄道車両
2か月前
日本車輌製造株式会社
鉄道車両
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ