TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025138135
公報種別
公開特許公報(A)
公開日
2025-09-25
出願番号
2024037037
出願日
2024-03-11
発明の名称
車両制御装置及び車両制御方法
出願人
Astemo株式会社
代理人
弁理士法人信友国際特許事務所
主分類
B60W
30/10 20060101AFI20250917BHJP(車両一般)
要約
【課題】周辺に存在する移動体と協調走行する場合に、移動体との接近に基づく乗員の違和感や恐怖感が生じていた問題を解決する。
【解決手段】自車両及び自車両以外の移動体が存在する道路において、移動体の行動パターンを少なくとも一つ以上推定する行動推定部と、自車両及び移動体が同時に通過可能な領域を通過可能領域とし、行動推定部により推定された少なくとも一つ以上の移動体の行動パターンに対して、自車両が通過可能領域内の目標位置までの経路を生成する経路生成部と、自車両の現在位置から目標位置までの経路に少なくとも一つ以上の特定位置を設定する特定位置設定部と、行動推定部により推定された行動パターンを移動体が実施する可能性を示す行動予測確率に基づいて、自車両の現在位置から特定位置までの区間における自車両の速度を設定する自車両挙動設定部と、を備える。
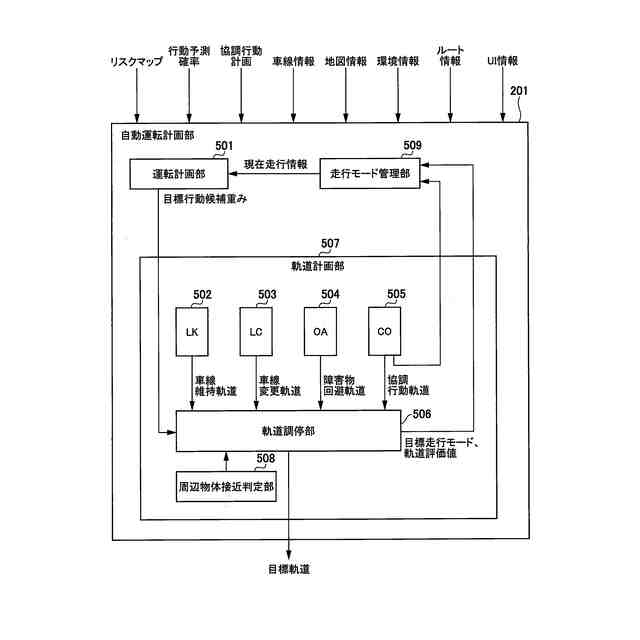
【選択図】図7
特許請求の範囲
【請求項1】
自車両及び前記自車両以外の移動体が存在する道路において、前記移動体の行動パターンを少なくとも一つ以上推定する行動推定部と、
前記自車両及び前記移動体が同時に通過可能な領域を通過可能領域とし、前記行動推定部により推定された少なくとも一つ以上の前記移動体の行動パターンに対して、前記自車両が前記通過可能領域内の目標位置までの経路を生成する経路生成部と、
前記自車両の現在位置から前記目標位置までの前記経路に少なくとも一つ以上の特定位置を設定する特定位置設定部と、
前記行動推定部により推定された行動パターンを前記移動体が実施する可能性を示す行動予測確率に基づいて、前記自車両の現在位置から前記特定位置までの区間における前記自車両の速度を設定する自車両挙動設定部と、を備える
車両制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記特定位置設定部は、前記行動予測確率に基づいて、前記自車両の現在位置から前記目標位置までの経路上に少なくとも一つ以上の特定位置を設定する
請求項1に記載の車両制御装置。
【請求項3】
前記特定位置設定部は、前記移動体の第一の行動予測確率に係る行動パターンに対して決定された前記経路において、前記自車両の現在位置から前記目標位置までの前記経路の距離に対する前記第一の行動予測確率の積の値を求め、前記目標位置から前記積の値だけ離れた位置に前記特定位置を設定する
請求項1に記載の車両制御装置。
【請求項4】
前記自車両挙動設定部は、前記自車両の現在位置から前記特定位置までの目標速度を、前記自車両が走行している道路に設定された通常走行区間速度よりも低い速度に設定する
請求項1に記載の車両制御装置。
【請求項5】
前記自車両挙動設定部は、前記移動体の尤も確からしい行動予測確率が所定値よりも小さい場合、前記特定位置に向けて減速し、前記特定位置において停車するように前記自車両の速度を設定する
請求項1に記載の車両制御装置。
【請求項6】
前記自車両挙動設定部は、前記自車両の現在位置から前記特定位置までの目標速度を、前記移動体の尤も確からしい行動予測確率と前記自車両が走行している道路に設定された通常走行区間速度の積の速度以下の速度に設定する
請求項1に記載の車両制御装置。
【請求項7】
前記特定位置設定部は、前記目標位置が複数存在する場合に、前記自車両の進行方向に対向する方向への移動を伴わずに前記自車両が複数の前記目標位置のそれぞれへ到達可能である経路を求め、前記経路の分岐点を前記特定位置として設定する
請求項1に記載の車両制御装置。
【請求項8】
前記特定位置設定部は、前記移動体の一の行動パターンに対して決定された前記経路と前記移動体の他の行動パターンに対して決定された前記経路とが交わる位置に前記特定位置を設定する
請求項1に記載の車両制御装置。
【請求項9】
自車両の制御を、演算処理装置で行う車両制御方法であり、
自車両及び移動体が存在する道路において、前記移動体の行動パターンを少なくとも一つ以上推定する行動推定処理と、
前記自車両及び前記移動体が同時に通過可能な領域を通過可能領域とし、前記行動推定処理により推定された少なくとも一つ以上の前記移動体の行動パターンに対して、前記自車両が前記通過可能領域内の目標位置までの経路を生成する経路生成処理と、
前記自車両の現在位置から前記目標位置までの前記経路に少なくとも一つ以上の特定位置を設定する特定位置設定処理と、
前記行動推定処理により推定された行動パターンを前記移動体が実施する可能性を示す行動予測確率に基づいて、前記自車両の現在位置から前記特定位置までの区間における前記自車両の速度を設定する自車両挙動設定処理と、を含む
車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置及び車両制御方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
近年、自動車等の車両における自動運転技術の開発が進んでいる。自動運転を行う上では、走行する道路が、常に適切な道路幅であるとは限らない。例えば、走行道路幅が狭く、自車両と対向車両がすれ違い困難な道路である狭路においては、すれ違いが可能な場所へ車両を待避させるために、通常の走行時とは異なる制御が必要である。
【0003】
例えば、特許文献1には、自車両と対向車両との間に待避スペースが存在しないような道路において、すれ違いが可能となる道路の入り口まで車両が戻るように、自車両の発進、停止、進行方向などの制御を行う情報処理装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-151177号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、市街地の狭路などでのすれ違い自動走行や駐車場での自動駐車支援を行う際には、自車両は、対向車両などの周囲の車両の位置を予測して、その位置でのすれ違いなどを行うようにしている。ここで、対向車両での走行意図変更や、自車両が予測した対向車両の行動予測に誤差が生じる可能性がある。このような場合、すれ違い走行や自動駐車支援の途中で走行経路の変更が必要となるので、利便性が悪化する。
【0006】
かかる点に鑑み、本発明は、周辺に存在する移動体と協調走行する場合に、移動体の行動予測結果に基づく乗員の違和感の緩和や走行効率を向上できる車両制御装置及び車両制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、例えば請求の範囲に記載の構成を採用する。
本願は、上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、車両制御装置として、自車両及び自車両以外の移動体が存在する道路において、移動体の行動パターンを少なくとも一つ以上推定する行動推定部と、自車両及び移動体が同時に通過可能な領域を通過可能領域とし、行動推定部により推定された少なくとも一つ以上の移動体の行動パターンに対して、自車両が通過可能領域内の目標位置までの経路を生成する経路生成部と、自車両の現在位置から目標位置までの経路に少なくとも一つ以上の特定位置を設定する特定位置設定部と、行動推定部により推定された行動パターンを移動体が実施する可能性を示す行動予測確率に基づいて、自車両の現在位置から特定位置までの区間における自車両の速度を設定する自車両挙動設定部と、を備える。
【発明の効果】
【0008】
本発明によれば、周辺に存在する対向車両の意図変更や自車両が予測した対向車の行動予測誤差により、すれ違い走行の途中で走行経路の変更が必要となった際も自車両の乗員の違和感の緩和や走行効率を向上する軌道を計画することができる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
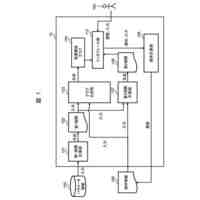
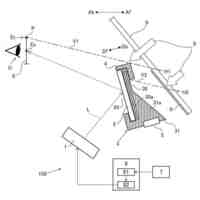
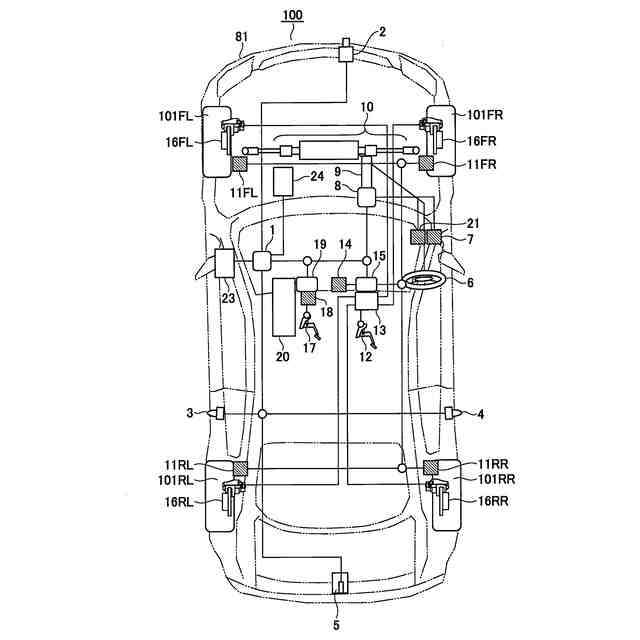
本発明の第1の実施形態例に係る車両制御装置を搭載した車両の走行駆動系及びセンサの構成例を示すブロック図である。
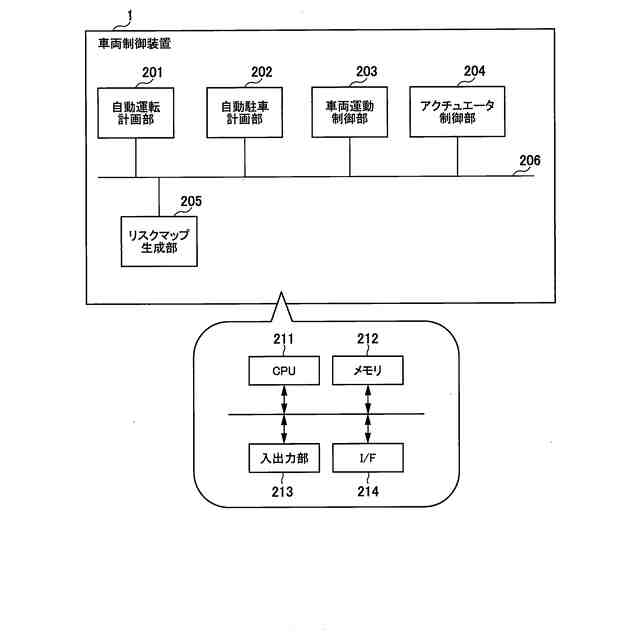
本発明の第1の実施形態例に係る車両制御装置の構成例を示すブロック図である。
本発明の第1の実施形態例に係る車両制御装置のリスクマップ生成部の構成例を示すブロック図である。
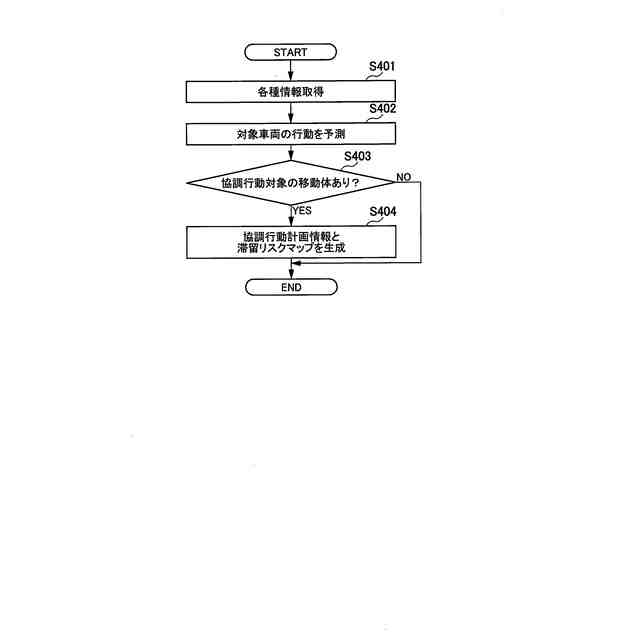
本発明の第1の実施形態例に係る車両制御装置による滞留リスクマップ生成処理の例を示すフローチャートである。
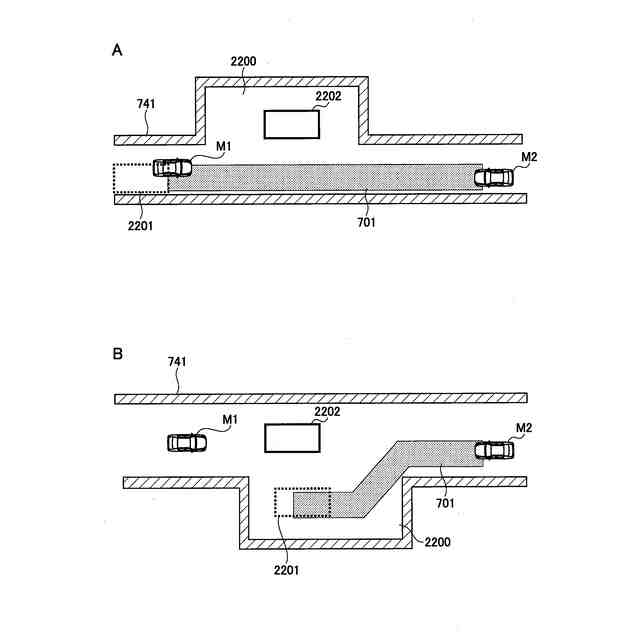
本発明の第1の実施形態例に係る車両制御装置において協調行動計画と滞留リスクマップの生成結果の一例を示した図である。
本発明の第1の実施形態例に係る車両制御装置の車両運転計画部の構成例を示すブロック図である。
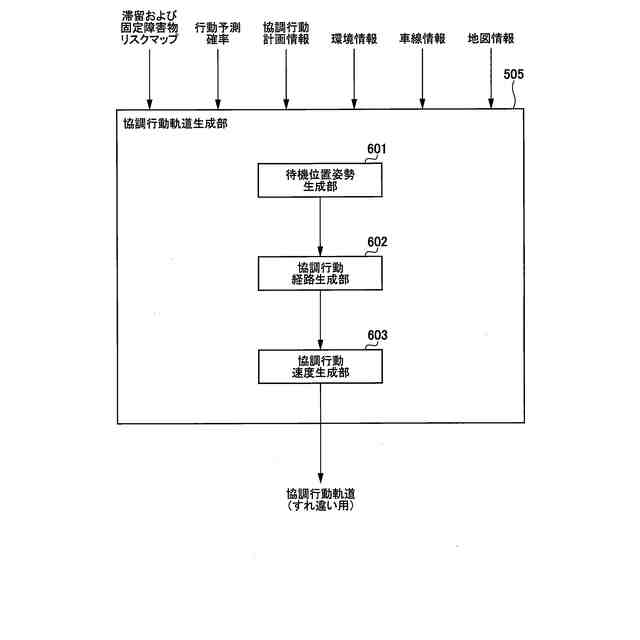
本発明の第1の実施形態例に係る車両制御装置の協調行動軌道生成部の構成例を示すブロック図である。
本発明の第1の実施形態例に係る車両制御装置による待避位置姿勢生成処理の例を示すフローチャートである。
本発明の第1の実施形態例に係る車両制御装置による目標待避位置姿勢候補の生成処理の例を示す図である。
本発明の第1の実施形態例に係る車両制御装置による協調行動軌道生成処理の例を示すフローチャートである。
本発明の第1の実施形態例に係る車両制御装置による到達位置候補の例を示す図である。
本発明の第1の実施形態例に係る車両制御装置による協調行動軌道(すれ違い軌道)の例を示す図である。
本発明の第1の実施形態例に係る車両制御装置による滞留リスクマップと計画された協調行動軌道(すれ違い軌道)の例を示す図である。
本発明の第1の実施形態例に係る協調行動軌道を走行時に自車両の乗員に不安感や違和感が生じる例を示す図である。
本発明の第1の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した協調行動速度プロファイル演算部の構成例を示すブロック図である。
本発明の第1の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した速度分岐点を示す図である。
本発明の第1の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した速度プロファイルの例を示す図である。
本発明の第1の実施形態例に係る車両制御装置による走行モード管理部の構成例を示すブロック図である。
本発明の第2の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した協調行動速度プロファイル演算部の構成例を示すブロック図である。
本発明の第2の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した速度分岐点の例を示す図である。
本発明の第2の実施形態例に係る車両制御装置による対向車の行動意図が確定していない場合を考慮した速度プロファイルの例を示す図である。
本発明の実施形態例の変形例1としての待機位置候補の例を示す図である。
本発明の実施形態例の変形例2としての待機位置候補の例を示す図である。
本発明の実施形態例の変形例3としての経路分岐点の例を示す図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本発明を実施するための形態の例(以下、「実施形態例」と称する)について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
改善システム、改善方法
2日前
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
4か月前
個人
警告装置
5か月前
個人
前輪キャスター
1か月前
個人
小型EVシステム
5か月前
個人
車輪清掃装置
4か月前
個人
タイヤ脱落防止構造
1か月前
個人
ホイルのボルト締結
2か月前
日本精機株式会社
ケース
5か月前
個人
ルーフ付きトライク
1か月前
井関農機株式会社
作業車両
3か月前
個人
キャンピングトライク
3か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
3か月前
個人
マスタシリンダ
1日前
日本精機株式会社
表示装置
1か月前
個人
車両通過構造物
2か月前
個人
キャンピングトレーラー
3か月前
個人
ワイパーゴム性能保持具
4か月前
個人
車両用スリップ防止装置
3か月前
個人
ブレーキシステム
5か月前
個人
乗合路線バスの客室装置
2か月前
個人
アクセルのソフトウェア
3か月前
横浜ゴム株式会社
タイヤ
5か月前
日本精機株式会社
車載表示装置
9日前
日本精機株式会社
車室演出装置
1か月前
個人
音声ガイド、音声サービス
2か月前
井関農機株式会社
収穫作業車両
4か月前
株式会社クラベ
ヒータユニット
4か月前
株式会社豊田自動織機
産業車両
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ