TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133828
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2025111416,2022034189
出願日
2025-07-01,2022-03-07
発明の名称
作業機械用制御システム、作業機械、作業機械の制御方法及び作業機械用制御プログラム
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/24 20060101AFI20250904BHJP(水工;基礎;土砂の移送)
要約
【課題】操作に係るオペレータの負担を軽減しやすい作業機械用制御システム、作業機械、作業機械の制御方法及び作業機械用制御プログラムを提供する。
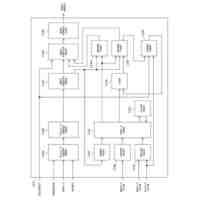
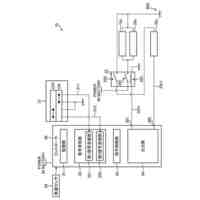
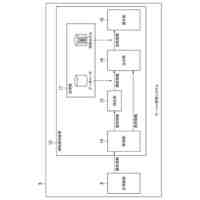
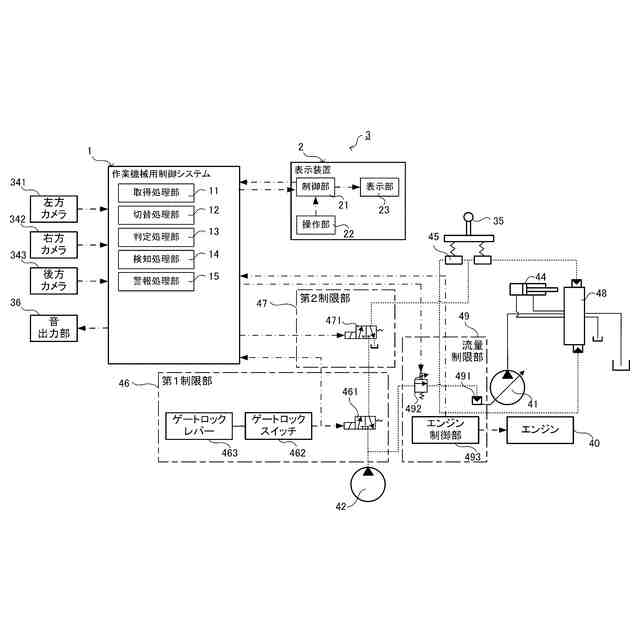
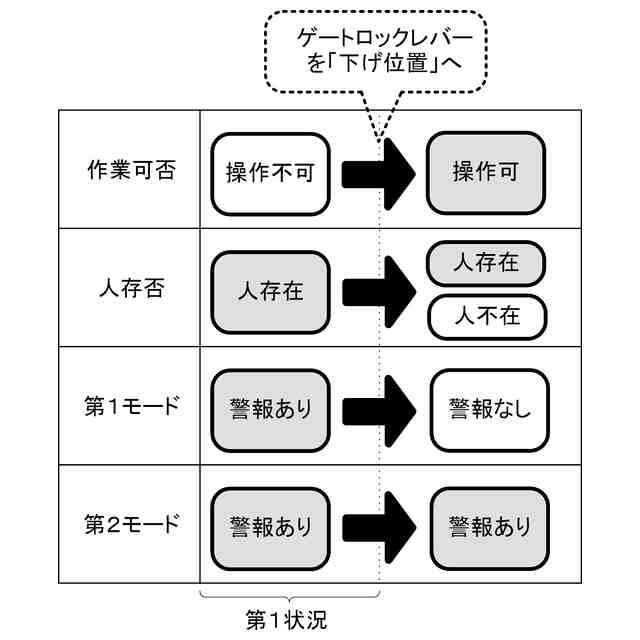
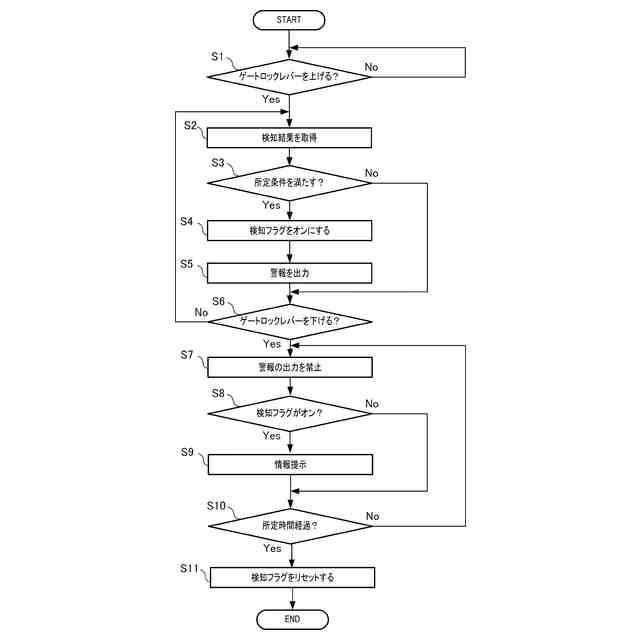
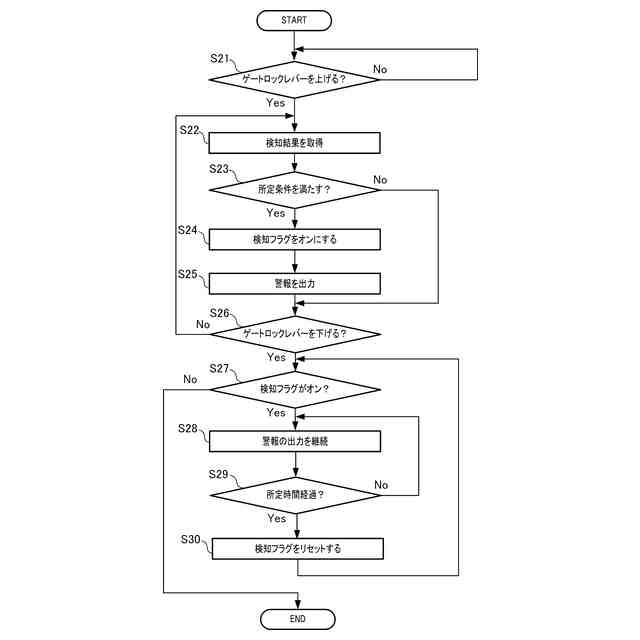
【解決手段】取得処理部11は、作業機械3の機体の周囲における物体の検知結果を取得する。判定処理部13は、作業機械3を操作できる状態にあるか操作できない状態にあるかを判定する。警報処理部15は、警報の出力を行う。切替処理部12は、警報処理部15の動作モードを少なくとも第1モードと第2モードとで切り替える。警報処理部15は、作業機械3を操作できない状態にあると判定され、かつ検知結果が所定条件を満たす状況である第1状況下で警報を出力し、第1モードにおいては、第1状況の後に作業機械3を操作できる状態にあると判定されたときに警報の出力を停止し、第2モードにおいては、第1状況の後に作業機械3を操作できる状態にあると判定されたときに警報の出力を継続する。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械の機体の周囲における物体の検知結果を取得する取得処理部と、
前記作業機械を操作できる状態にあるか操作できない状態にあるかを判定する判定処理部と、
警報の出力を行う警報処理部と、
前記警報処理部の動作モードを少なくとも第1モードと第2モードとで切り替える切替処理部と、を備え、
前記警報処理部は、
前記作業機械を操作できない状態にあると判定され、かつ前記検知結果が前記作業機械の周囲の監視エリアに前記物体が存在することを含む所定条件を満たす状況を第1状況とする場合において、前記第1状況下で前記警報を出力し、
前記第1モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を停止し、
前記第2モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を継続する、
作業機械用制御システム。
続きを表示(約 800 文字)
【請求項2】
前記切替処理部は、ユーザの操作に応じて、前記警報処理部の動作モードの切り替えを行う、
請求項1に記載の作業機械用制御システム。
【請求項3】
前記判定処理部は、前記作業機械のゲートロックレバーがロック状態にあるか、又は前記作業機械のイグニッションがオフであれば、前記作業機械を操作できない状態にあると判定し、前記ゲートロックレバーがロック解除状態にあり、かつ前記イグニッションがオンであれば、前記作業機械を操作できる状態にあると判定する、
請求項1又は2に記載の作業機械用制御システム。
【請求項4】
請求項1~3のいずれか1項に記載の作業機械用制御システムと、
前記機体と、を備える、
作業機械。
【請求項5】
作業機械の機体の周囲における物体の検知結果を取得することと、
前記作業機械を操作できる状態にあるか操作できない状態にあるかを判定することと、
前記作業機械を操作できない状態にあると判定され、かつ前記検知結果が前記作業機械の周囲の監視エリアに前記物体が存在することを含む所定条件を満たす状況を第1状況とする場合において、前記第1状況下で警報を出力することと、
動作モードを少なくとも第1モードと第2モードとで切り替えることと、を有し、
前記第1モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を停止し、
前記第2モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を継続する、
作業機械の制御方法。
【請求項6】
請求項5に記載の作業機械の制御方法を、
1以上のプロセッサに実行させるための作業機械用制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機体の周囲における物体を検出可能な作業機械に用いられる、作業機械用制御システム、作業機械、作業機械の制御方法及び作業機械用制御プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
関連技術として、作業機械(ショベル)の周囲における人の存否を判定する作業機械用制御システム(作業機械用周辺監視装置)が知られている(例えば、特許文献1参照)。この作業機械用制御システムは、ゲートロックレバーがロック状態にあって作業機械が操作できる状態(作業可能状態)にないと判定され、かつ作業機械の周囲に人が存在すると判定された場合、人検出フラグの値を「1」(オン)に設定するものの、この時点では警報処理部(警報制御手段)が警報を出力させない。その後、ゲートロックレバーがロック解除状態になり、作業機械が操作できる状態に切り替わると、作業機械用制御システムは、その時点で作業機械の周囲に人が存在するか否かによらず、人検出フラグの値が「1」であれば警報処理部にて警報を出力する。
【0003】
このように、関連技術に係る作業機械用制御システムでは、警報処理部は、作業機械が操作できない状態にあると判定され、かつ作業機械の周囲に人が存在すると判定された場合、その後に作業機械が操作できる状態にあると判定されたときに警報を出力させる。
【先行技術文献】
【特許文献】
【0004】
特開2014-181509号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記関連技術では、ゲートロックレバーがロック状態にあれば警報が出力されないので、オペレータが、作業機械の周囲に人が存在することを認識しないままに、ゲートロックレバーをロック解除状態とし、作業機械が操作できる状態に移行する場合がある。このような場合に、例えば、急に作業機械が勢いよく動作することを避けるには、オペレータが作業機械を注意して操作する必要がある。
【0006】
本発明の目的は、操作に係るオペレータの負担を軽減しやすい作業機械用制御システム、作業機械、作業機械の制御方法及び作業機械用制御プログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様に係る作業機械用制御システムは、取得処理部と、判定処理部と、警報処理部と、切替処理部と、を備える。前記取得処理部は、作業機械の機体の周囲における物体の検知結果を取得する。前記判定処理部は、前記作業機械を操作できる状態にあるか操作できない状態にあるかを判定する。前記警報処理部は、警報の出力を行う。前記切替処理部は、前記警報処理部の動作モードを少なくとも第1モードと第2モードとで切り替える。前記警報処理部は、前記第1状況下で前記警報を出力する。前記第1状況は、前記作業機械を操作できない状態にあると判定され、かつ前記検知結果が前記作業機械の周囲の監視エリアに前記物体が存在することを含む所定条件を満たす状況である。前記警報処理部は、前記第1モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を停止し、前記第2モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を継続する。
【0008】
本発明の一態様に係る作業機械は、前記作業機械用制御システムと、前記機体と、を備える。
【0009】
本発明の一態様に係る作業機械の制御方法は、作業機械の機体の周囲における物体の検知結果を取得することと、前記作業機械を操作できる状態にあるか操作できない状態にあるかを判定することと、第1状況下で警報を出力することと、動作モードを少なくとも第1モードと第2モードとで切り替えることと、を有する。前記第1状況は、前記作業機械を操作できない状態にあると判定され、かつ前記検知結果が前記作業機械の周囲の監視エリアに前記物体が存在することを含む所定条件を満たす状況である。前記第1モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を停止し、前記第2モードにおいては、前記第1状況の後に前記作業機械を操作できる状態にあると判定されたときに前記警報の出力を継続する。
【0010】
本発明の一態様に係る作業機械用制御プログラムは、前記作業機械の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
大都市防災設備
25日前
株式会社武井工業所
積みブロック
5日前
個人
水底地盤の天地返し工法と専用作業船
27日前
日立建機株式会社
作業機械
3日前
株式会社大林組
基礎構造
27日前
ヤンマーホールディングス株式会社
作業機械
20日前
住友金属鉱山株式会社
タンク設置用基礎
20日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
23日前
株式会社地盤改良堀田
基礎杭の設置方法
24日前
株式会社フジタ
掘削機
4日前
株式会社山幸総建
シートパイルの土砂除去具
25日前
有限会社 櫂設計事務所
掘削・撹拌具
11日前
株式会社日立建機ティエラ
建設機械
24日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
19日前
株式会社武井工業所
積みブロック用基礎ブロック
5日前
日本車輌製造株式会社
建設機械の組立方法
20日前
アクアインテック株式会社
メーターボックスの蓋
1か月前
アロン化成株式会社
排水管通気設備
25日前
株式会社小松製作所
作業機械
5日前
株式会社トラバース
地盤改良ユニット及び地盤改良機
4日前
日立建機株式会社
作業機械
19日前
JFEスチール株式会社
モノパイル
13日前
株式会社小松製作所
作業機械
12日前
戸田建設株式会社
基礎構造
20日前
コベルコ建機株式会社
作業機械
9日前
株式会社大林組
地盤評価方法及び地盤評価システム
20日前
株式会社高脇基礎工事
鋼矢板割り治具
20日前
豊国工業株式会社
膜状起伏ゲート
4日前
株式会社小松製作所
路面整備システム
4日前
株式会社コマツレンタル宮崎
スクレーパ
6日前
ウチノ看板株式会社
ポール工作物及びポール工作物の設置方法
6日前
鹿島建設株式会社
洗掘防止部材設置システム、洗掘防止部材設置方法
18日前
ヤンマーホールディングス株式会社
作業機械
4日前
鹿島建設株式会社
風力発電用基礎構造、風力発電用基礎構造の施工方法
18日前
日鉄建材株式会社
排水パイプ、排水パイプ用端末材、及び擁壁排水構造
11日前
オリエンタル白石株式会社
ケーソン管理システム及びプログラム
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ