TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133133
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024030882
出願日
2024-03-01
発明の名称
手術支援システムおよび手術支援システムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250904BHJP(医学または獣医学;衛生学)
要約
【課題】内視鏡の視野が大きく移動するのを抑制することが可能な手術支援システムを提供する。
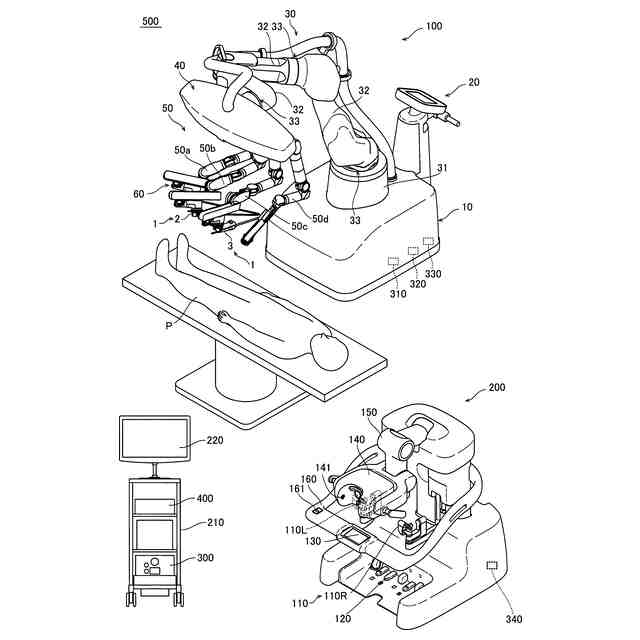
【解決手段】手術支援システム500では、第1制御装置310は、操作部110によって内視鏡3を所定の距離ΔX移動させる操作を受け付けた場合、内視鏡3の軸線方向において内視鏡3の先端よりも先にオフセットされた仮想的な位置P0に設定された制御点を、所定の距離ΔXに対応する距離移動させる処理を実行する。
【選択図】図23
特許請求の範囲
【請求項1】
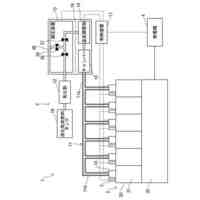
内視鏡を支持する第1ロボットアームを含む手術装置と、
前記内視鏡に対する操作を受け付ける操作部を含む操作装置と、
前記操作部によって前記内視鏡を所定の距離移動させる操作を受け付けた場合、前記内視鏡の軸線方向において前記内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を、前記所定の距離に対応する距離移動させる処理を実行する、制御装置と、を備える、手術支援システム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御装置は、前記操作部によって前記内視鏡を前記所定の距離移動させる操作を受け付けた場合、前記内視鏡の移動の支点となるピボット位置を支点として、前記仮想的な位置に設定された制御点を、前記所定の距離に対応する距離移動させる処理を実行する、請求項1に記載の手術支援システム。
【請求項3】
前記第1ロボットアームは、前記内視鏡を前記内視鏡長手軸周りに回転可能であり、
前記仮想的な位置に設定された制御点は、前記長手軸上に設定される、請求項2に記載の手術支援システム。
【請求項4】
前記制御装置は、
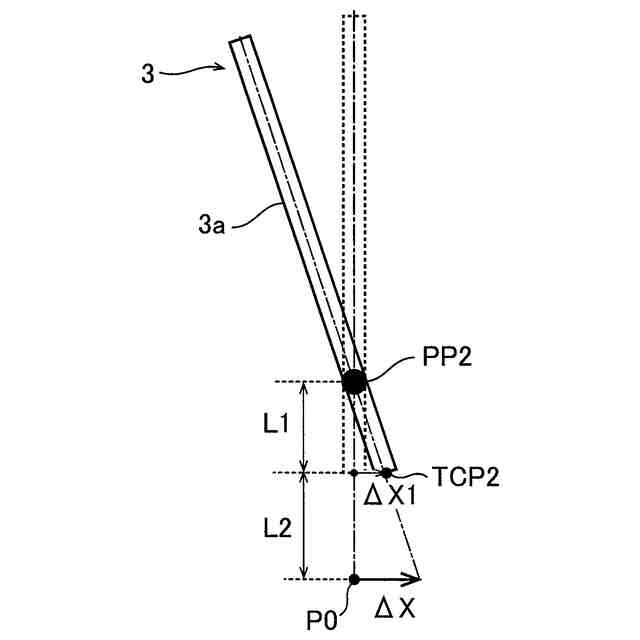
前記操作部によって前記内視鏡を前記所定の距離移動させる操作を受け付けた場合、前記所定の距離をΔXとし、前記所定の距離に対応する距離をΔX1とし、前記ピボット位置から前記内視鏡の先端までの距離をL1とし、前記内視鏡の先端から前記仮想的な位置までの距離をL2とし、ΔX1=ΔX×L1/(L1+L2)の関係式に基づいて、前記所定の距離に対応する距離ΔX1移動させる処理を実行する、請求項2に記載の手術支援システム。
【請求項5】
前記手術装置は、インストゥルメントを支持する第2ロボットアームを含み、
前記操作部は、前記インストゥルメントに対する操作を受け付け、
前記制御装置は、前記操作部によって前記インストゥルメントを前記所定の距離移動させる操作を受け付けた場合、前記インストゥルメントの先端部に設定された制御点を前記所定の距離に対応する距離移動させる処理を実行する、請求項1に記載の手術支援システム。
【請求項6】
前記制御装置は、
前記操作部によって前記インストゥルメントを前記所定の距離させる操作を受け付けた場合、前記インストゥルメントの移動の支点となるピボット位置を支点として、前記制御点を前記所定の距離に対応する距離移動させる処理を実行する、請求項5に記載の手術支援システム。
【請求項7】
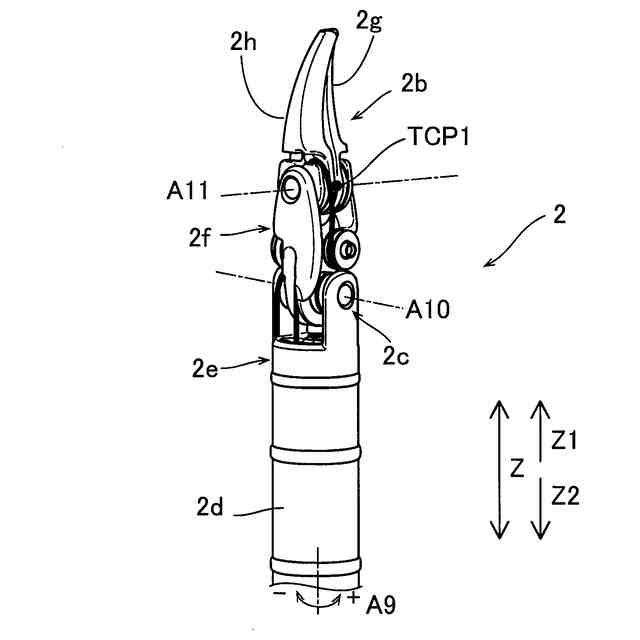
前記インストゥルメントは、エンドエフェクタと、前記エンドエフェクタを第1回転軸周りに回転可能に支持する第1支持部材と、前記第1支持部材を第2回転軸周りに回転可能に支持する第2支持部材と、前記第2支持部材を支持するシャフトと、を含み、
前記制御点は、前記エンドエフェクタの先端、前記シャフトの長手軸と前記第1回転軸との交点、または、前記シャフトの長手軸と前記第2回転軸との交点に設定される、請求項5に記載の手術支援システム。
【請求項8】
前記制御装置は、
前記操作部によって前記インストゥルメントを移動させる操作を受け付けた場合、受け付けられた操作量をスケーリングして実際に前記インストゥルメントを移動させる処理を実行し、
前記操作部によって前記内視鏡を移動させる操作を受け付けた場合、受け付けられた操作量に対して前記インストゥルメントを移動させる場合と同じ量スケーリングして実際に前記内視鏡を移動させる処理を実行する、請求項5に記載の手術支援システム。
【請求項9】
前記仮想的な位置の前記内視鏡の先端からの距離は、前記インストゥルメントの前記制御点と前記内視鏡の先端との間の距離に基づいて設定されている、請求項5に記載の手術支援システム。
【請求項10】
前記操作部は、
操作者の右手により操作される右手用操作部と、
前記操作者の左手により操作される左手用操作部と、を含み、
前記インストゥルメントを移動させる操作は、前記右手用操作部および前記左手用操作部のうちの一方によって受け付けられ、
前記内視鏡を移動させる操作は、前記右手用操作部および前記左手用操作部の両方によって受け付けられる、請求項5に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術支援システムおよび手術支援システムの制御方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、手術器具を支持するロボットアームを備える手術支援システムが知られている。特許文献1には、手術器具や内視鏡を支持するマニピュレータと、マニピュレータを操作するマスターコントロール装置と、マニピュレータの動作を制御する制御装置と、を備える手術支援システムが開示されている。特許文献1では、制御装置は、マスターコントロール装置の操作入力を受け付けて、受け付けた操作に基づいてマニピュレータに支持された手術器具や内視鏡がピボット位置を中心に動作するように制御する。ピボット位置は、患者の切開部である。
【先行技術文献】
【特許文献】
【0003】
米国特許第8004229号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
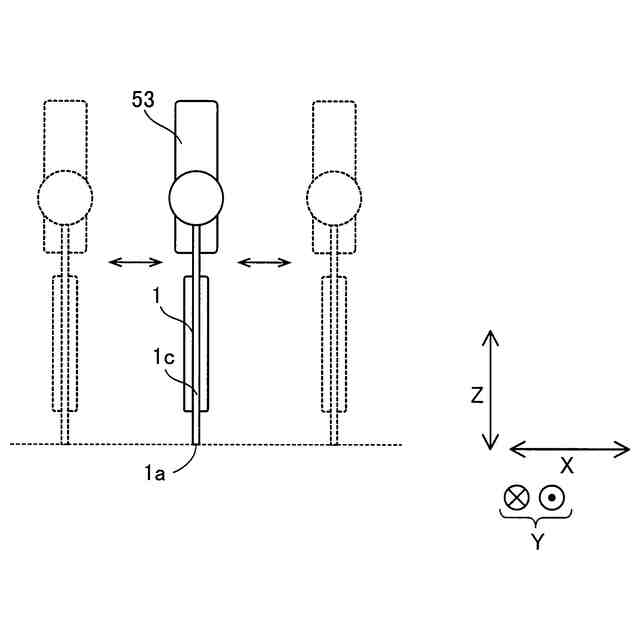
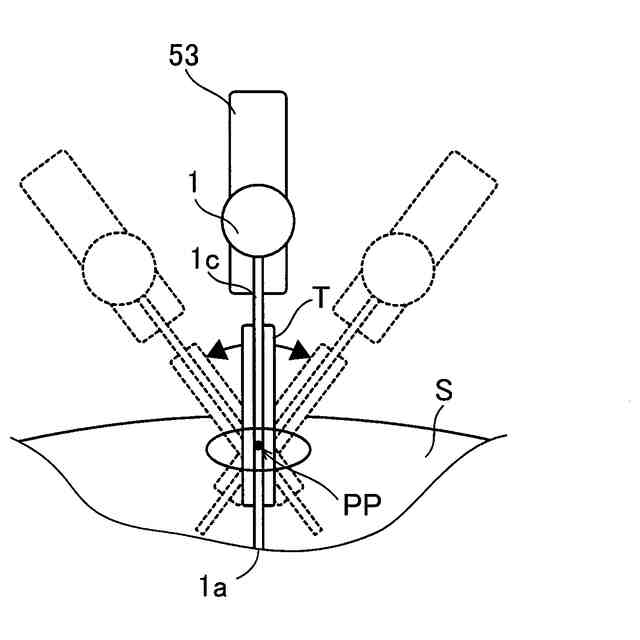
特許文献1のように内視鏡がピボット位置を支点として回転するようにマニピュレータの動作が制御される場合、ピボット位置によってはマニピュレータの少しの移動によって内視鏡の視野が大きく変更される場合がある。また、ピボット位置が患者の切開部に設定されており、内視鏡が切開部を支点に回転する。そして、特に、内視鏡の先端と切開部との間の距離が短い場合では、内視鏡の先端を少し移動させる際にも切開部を支点とする内視鏡の回転角度が大きくなり、内視鏡の視野が急激に大きく移動してしまう。そこで、内視鏡の視野が大きく移動するのを抑制することが望まれている。
【0005】
この開示は、内視鏡の視野が大きく移動するのを抑制することが可能な手術支援システムおよび手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
本開示の第1の局面による手術支援システムは、内視鏡を支持する第1ロボットアームを含む手術装置と、内視鏡に対する操作を受け付ける操作部を含む操作装置と、操作部によって内視鏡を所定の距離移動させる操作を受け付けた場合、内視鏡の軸線方向において内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を、所定の距離に対応する距離移動させる処理を実行する、制御装置と、を備える。なお、内視鏡の先端とは、内視鏡の先端自体と、先端の近傍の位置を含む広い概念である。
【0007】
本開示の第1の局面による手術支援システムでは、制御装置は、操作部によって内視鏡を所定の距離移動させる操作を受け付けた場合、内視鏡の軸線方向において内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を、所定の距離に対応する距離移動させる処理を実行する。これにより、たとえば、基準となる点を支点として内視鏡の先端が円弧状に移動される場合などでは、内視鏡の先端を所定の距離に対応する距離移動させる場合よりも、内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を所定の距離に対応する距離移動させる場合の方が、内視鏡の先端の移動量は小さくなる。その結果、内視鏡の視野が大きく移動するのを抑制できる。
【0008】
本開示の第2の局面による手術支援システムの制御方法は、ロボットアームに支持される内視鏡に対する操作を受け付ける操作部によって、内視鏡を所定の距離移動させる操作を受け付けることと、内視鏡の軸線方向において内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を、所定の距離に対応する距離移動させることと、を備える。なお、内視鏡の先端とは、内視鏡の先端自体と、先端の近傍の位置を含む広い概念である。
【0009】
本開示の第2の局面による手術支援システムの制御方法は、上記のように、内視鏡の軸線方向において内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を、所定の距離に対応する距離移動させることを備える。これにより、たとえば、基準となる点を支点として内視鏡の先端が円弧状に移動される場合などでは、内視鏡の先端を所定の距離に対応する距離移動させる場合よりも、内視鏡の先端よりも先にオフセットされた仮想的な位置に設定された制御点を所定の距離に対応する距離移動させる場合の方が、内視鏡の先端の移動量は小さくなる。その結果、内視鏡の視野が大きく移動するのを抑制することが可能な手術支援システムの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、内視鏡の視野が大きく移動するのを抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ロボット
1日前
川崎重工業株式会社
遠心ターボ機械
1日前
川崎重工業株式会社
ゼオライト触媒
1日前
川崎重工業株式会社
エンドエフェクタ
13日前
川崎重工業株式会社
環状フレームの成形方法
3日前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
13日前
川崎重工業株式会社
焼却灰の骨材化システムおよび骨材化方法
13日前
川崎重工業株式会社
水素の生産計画システムおよび生産計画方法
3日前
川崎重工業株式会社
移動体、給電システム及びワイヤレス式受電方法
14日前
川崎重工業株式会社
秘密計算システム、秘密計算方法及び秘密計算装置
今日
川崎重工業株式会社
異常診断装置、異常診断プログラムおよび異常診断方法
3日前
ヤンマーホールディングス株式会社
燃料供給装置及びエンジンシステム
13日前
川崎重工業株式会社
手術支援システム、手術支援システムの制御装置および手術支援システムの制御方法
13日前
個人
健康器具
7か月前
個人
短下肢装具
2か月前
個人
歯茎みが品
8か月前
個人
鼾防止用具
7か月前
個人
脈波測定方法
7か月前
個人
白内障治療法
6か月前
個人
導電香
8か月前
個人
洗井間専家。
6か月前
個人
マッサージ機
7か月前
個人
嚥下鍛錬装置
2か月前
個人
前腕誘導装置
2か月前
個人
脈波測定方法
7か月前
個人
矯正椅子
4か月前
個人
歯の修復用材料
3か月前
個人
クリップ
8か月前
個人
バッグ式オムツ
3か月前
個人
胸骨圧迫補助具
27日前
個人
ホバーアイロン
5か月前
個人
片足歩行支援具
8か月前
個人
汚れ防止シート
3日前
個人
アイマスク装置
1か月前
個人
シャンプー
5か月前
個人
湿布連続貼り機。
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ