TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025137777
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2025124572,2020171024
出願日
2025-07-25,2020-10-09
発明の名称
手術支援システム、手術支援システムの制御装置および手術支援システムの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20250911BHJP(医学または獣医学;衛生学)
要約
【課題】アームの関節部を構成する部品を保護するとともに、アームの振動を抑制することが可能な手術支援システムを提供する。
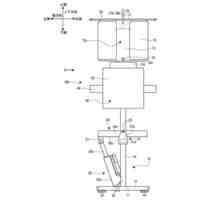
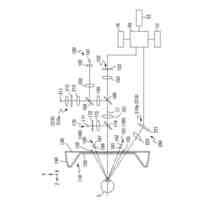
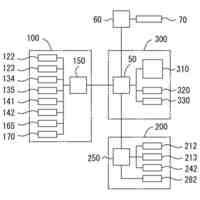
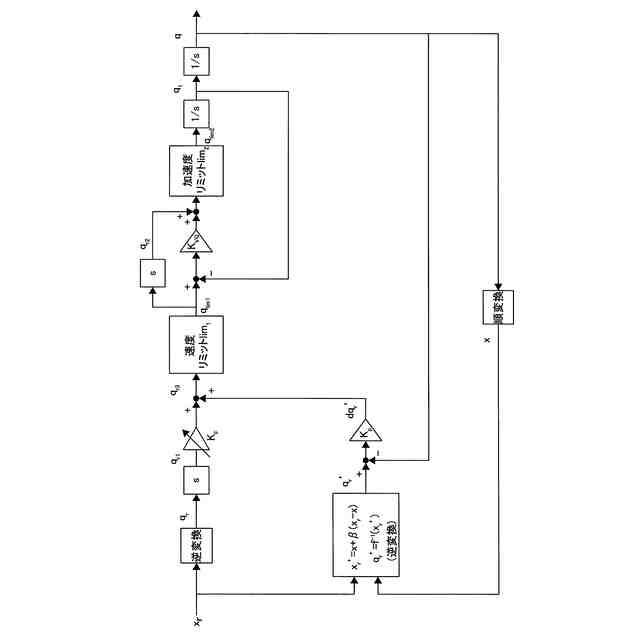
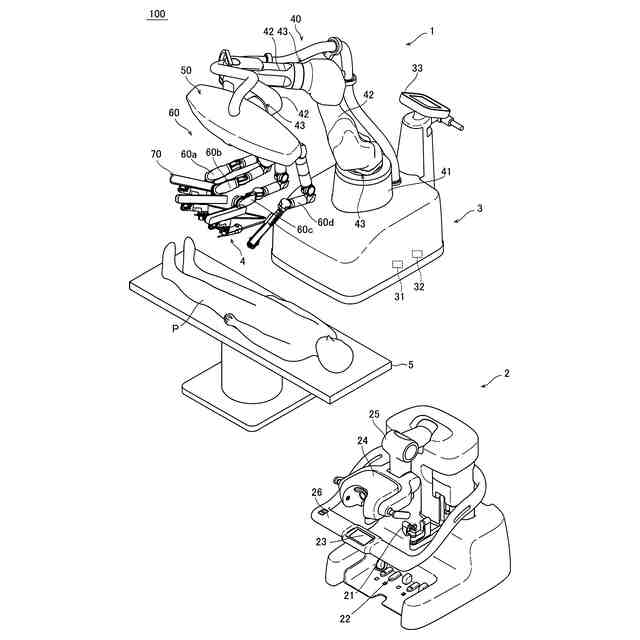
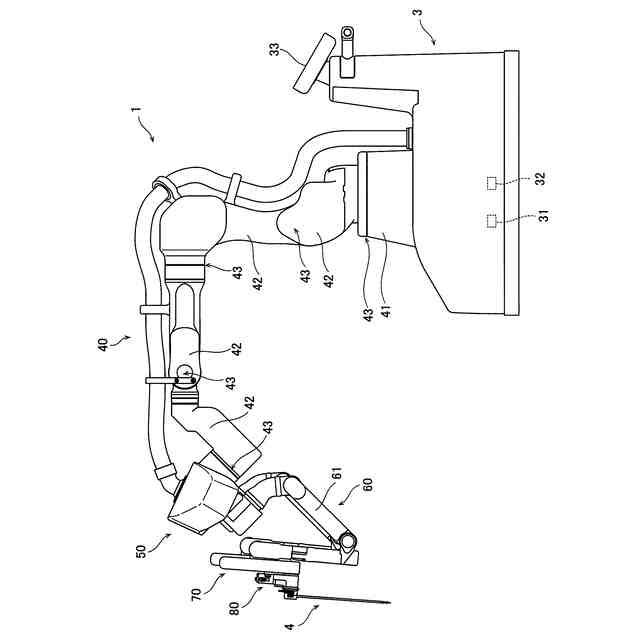
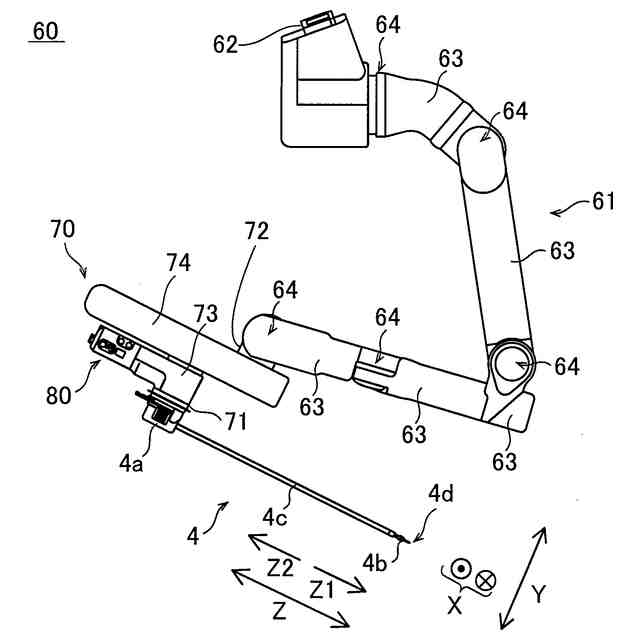
【解決手段】この外科手術システム100(手術支援システム)は、先端側に医療器具4が取り付けられるアーム60を含む医療用マニピュレータ1と、医療器具4に対する操作を受け付ける操作用マニピュレータアーム21を含む遠隔操作装置2と、受け付けられた操作に基づいて、医療器具4を動作させる際の速度指令値q
r1
および加速度指令値q
r2
を含む動作指令値qを算出し、動作指令値qに基づいて医療器具4の動作を制御する制御部31と、を備える。そして、制御部31は、速度指令値q
r1
を速度制限値lim
1
の範囲内に制限し、加速度指令値q
r2
を加速度制限値lim
2
の範囲内に制限する。
【選択図】図11
特許請求の範囲
【請求項1】
手術支援システムであって、
先端側に医療器具が取り付けられ複数の関節部を有するアームを含む患者側装置と、
前記医療器具に対する操作を受け付ける操作部を含む操作者側装置と、
受け付けられた前記操作に基づいて、前記医療器具を動作させる際の速度指令値および加速度指令値を算出し、前記速度指令値および前記加速度指令値に基づいて前記医療器具の動作を制御する制御部と、
を備え、
前記制御部は、
制限前の前記速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の前記速度指令値を速度制限値の範囲内に制限し、
制限前の前記加速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記加速度指令値の一定の関係が崩れるのが抑制されるように、軸毎の前記加速度指令値を加速度制限値の範囲内に制限する、手術支援システム。
続きを表示(約 2,200 文字)
【請求項2】
請求項1に記載の手術支援システムであって、
前記制御部は、
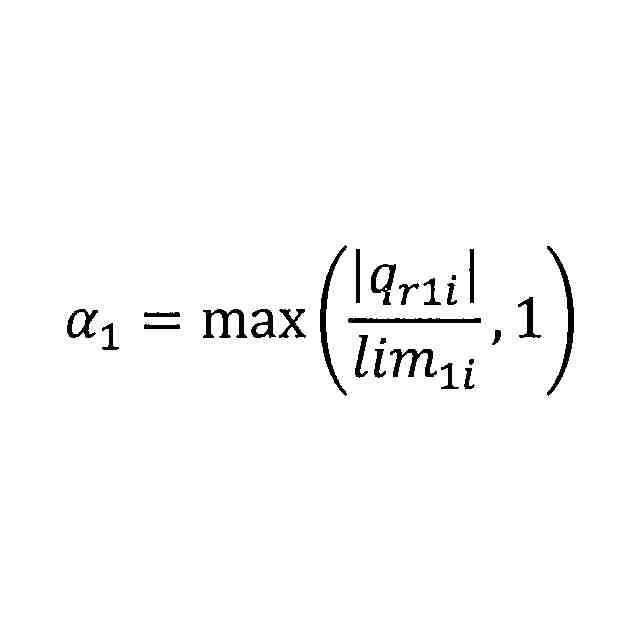
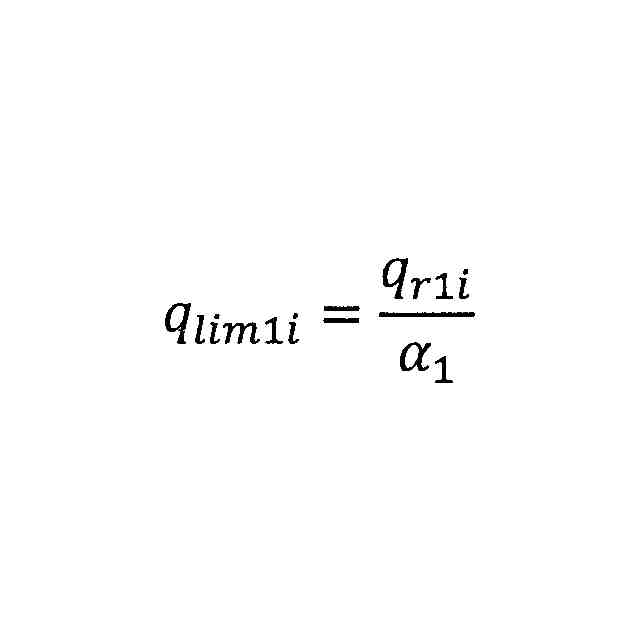
算出された制限前の軸毎の前記速度指令値を軸毎の前記速度制限値で除算した軸毎の速度超過率のうち、最も大きい前記速度超過率により、各軸の前記速度指令値を除算して、各軸の前記速度指令値を制限し、
算出された制限前の軸毎の前記加速度指令値を軸毎の前記加速度制限値で除算した軸毎の加速度超過率のうち、最も大きい前記加速度超過率により、各軸の前記加速度指令値を除算して、各軸の前記加速度指令値を制限する、手術支援システム。
【請求項3】
請求項1または2に記載の手術支援システムであって、
前記制御部は、
前記速度制限値の範囲内に制限された前記速度指令値および前記加速度制限値の範囲内に制限された前記加速度指令値に基づく動作指令値を算出し、
算出した前記動作指令値に基づいて、前記医療器具の回転移動の支点となるピボット位置のずれを補正する補正指令値を算出する、手術支援システム。
【請求項4】
請求項3に記載の手術支援システムであって、
前記制御部は、前記補正指令値を、前記速度制限値の範囲内に制限する前の前記速度指令値に加算する、手術支援システム。
【請求項5】
請求項3または請求項4に記載の手術支援システムであって、
前記操作部は、前記医療器具に対する入力位置指令値を受け付け、
前記制御部は、
算出された前記動作指令値をフィードバックし、
フィードバックされた前記動作指令値に対して順運動学による変換を行って、順運動学変換後指令値を算出し、
前記入力位置指令値および前記順運動学変換後指令値に対して逆運動学による変換を行うことにより、逆運動学変換後指令値を算出し、
前記動作指令値および前記逆運動学変換後指令値に基づいて、前記補正指令値を算出する、手術支援システム。
【請求項6】
請求項5に記載の手術支援システムであって、
前記制御部は、
算出した前記速度指令値に対してフィードフォワード制御のゲインを乗算し、
前記医療器具の移動の目標となる位置の値である目標値と、前記医療器具の現在位置の値である現在値との差に基づいて、前記速度指令値に対する前記フィードフォワード制御の寄与に対してフィードバック制御の寄与を大きくするように、前記フィードフォワード制御のゲインを設定する、手術支援システム。
【請求項7】
請求項6に記載の手術支援システムであって、
前記ゲインは、前記目標値と前記現在値との差が大きくなるにしたがって小さくなる、手術支援システム。
【請求項8】
請求項7に記載の手術支援システムであって、
前記ゲインは、前記目標値と前記現在値との差が大きくなるにしたがって線形的に小さくなる、手術支援システム。
【請求項9】
先端側に医療器具が取り付けられる複数の関節部を有するアームを含む患者側装置と、前記医療器具に対する操作を受け付ける操作部を含む操作者側装置と、を備える手術支援システムの制御装置であって、
受け付けられた前記操作に基づいて、前記医療器具を動作させる際の速度指令値および加速度指令値を算出し、前記速度指令値および前記加速度指令値に基づいて前記医療器具の動作を制御する制御部を備え、
前記制御部は、
制限前の前記速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の前記速度指令値を速度制限値の範囲内に制限し、
制限前の前記加速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記加速度指令値の一定の関係が崩れるのが抑制されるように、軸毎の前記加速度指令値を加速度制限値の範囲内に制限する、手術支援システムの制御装置。
【請求項10】
先端側に医療器具が取り付けられ複数の関節部を有するアームを含む患者側装置と、前記医療器具に対する操作を受け付ける操作部を含む操作者側装置と、制御部と、を備える手術支援システムの制御方法であって、
前記操作部が、前記医療器具に対する操作を受け付けるステップと、
前記制御部が、受け付けられた前記操作に基づいて、前記医療器具を動作させる際の速度指令値および加速度指令値を算出し、前記速度指令値および前記加速度指令値に基づいて前記医療器具の動作を制御するステップと、
を備え、
前記制御部が、前記速度指令値および前記加速度指令値に基づいて前記医療器具の動作を制御するステップは、
前記制御部が、制限前の前記速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の前記速度指令値を速度制限値の範囲内に制限するステップと、
前記制御部が、制限前の前記加速度指令値を前記複数の関節部の軸毎に算出し、軸毎の前記加速度指令値の一定の関係が崩れるのが抑制されるように、前記加速度指令値を加速度制限値の範囲内に制限するステップと、
を含む、手術支援システムの制御方法。
発明の詳細な説明
【技術分野】
【0001】
この発明は、手術支援システム、手術支援システムの制御装置および手術支援システムの制御方法に関し、特に、操作部が受け付けた操作に基づいて医療器具の動作を制御する手術支援システム、手術支援システムの制御装置および手術支援システムの制御方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、アームと、アームの末端に接続されるツール(医療器具)と、入力ハンドル(操作部)とを備えるロボット外科用システムが知られている。例えば、上記特許文献1に記載のロボット外科用システムでは、操作部が受け付けた操作量に基づいて医療器具の移動を制御している。医療器具は、外科部位である患者の体の内部において移動する。
【先行技術文献】
【特許文献】
【0003】
特表2018-505739号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来、アームの関節に含まれるモータなどの部品の保護や、アームの振動の抑制に関して改善の余地がある。例えば、入力ハンドルが受け付けた操作量が大きい場合、アームの単位時間当たりの移動量が大きくなる。この場合、アームの関節に設けられるモータが過度に高速に回転してモータを構成する部品が破損するおそれがある。また、アームの単位時間当たりの移動量が大きくなることに起因して、アームが振動するおそれがある。
【0005】
この発明は、上記のような課題を解決するためになされたものであり、この発明の1つの目的は、アームの関節を構成する部品を保護するとともに、アームの振動を抑制することが可能な手術支援システム、手術支援システムの制御装置および手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、この発明の第1の局面による手術支援システムは、手術支援システムであって、先端側に医療器具が取り付けられ複数の関節部を有するアームを含む患者側装置と、医療器具に対する操作を受け付ける操作部を含む操作者側装置と、受け付けられた操作に基づいて、医療器具を動作させる際の速度指令値および加速度指令値を算出し、速度指令値および加速度指令値に基づいて医療器具の動作を制御する制御部と、を備え、制御部は、制限前の速度指令値を複数の関節部の軸毎に算出し、軸毎の速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の速度指令値を速度制限値の範囲内に制限し、制限前の加速度指令値を複数の関節部の軸毎に算出し、軸毎の加速度指令値の一定の関係が崩れるのが抑制されるように、軸毎の加速度指令値を加速度制限値の範囲内に制限する。
【0007】
この発明の第1の局面による手術支援システムでは、上記のように、制御部は、速度指令値を速度制限値の範囲内に制限し、加速度指令値を加速度制限値の範囲内に制限する。これにより、操作部が受け付けた操作量が比較的大きい場合でも、速度指令値および加速度指令値の両方が制限されるので、アームの単位時間当たりの移動量が大きくなるのが抑制される。このため、アームの関節部に設けられるモータが過度に高速に回転するのが抑制されるので、アームの関節部を構成するモータなどの部品を保護することができる。また、アームの単位時間当たりの移動量が大きくなるのが抑制されるので、アームの単位時間当たりの移動量が大きくなることに起因するアームの振動を抑制することができる。これらの結果、アームの関節部を構成する部品を保護するとともに、アームの振動を抑制することができる。
【0008】
この発明の第2の局面による手術支援システムの制御装置は、先端側に医療器具が取り付けられる複数の関節部を有するアームを含む患者側装置と、医療器具に対する操作を受け付ける操作部を含む操作者側装置と、を備える手術支援システムの制御装置であって、受け付けられた操作に基づいて、医療器具を動作させる際の速度指令値および加速度指令値を算出し、速度指令値および加速度指令値に基づいて医療器具の動作を制御する制御部を備え、制御部は、制限前の速度指令値を複数の関節部の軸毎に算出し、軸毎の速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の速度指令値を速度制限値の範囲内に制限し、制限前の加速度指令値を複数の関節部の軸毎に算出し、軸毎の加速度指令値の一定の関係が崩れるのが抑制されるように、軸毎の加速度指令値を加速度制限値の範囲内に制限する。
【0009】
この発明の第2の局面による手術支援システムの制御装置では、上記のように、制御部は、速度指令値を速度制限値の範囲内に制限し、加速度指令値を加速度制限値の範囲内に制限する。これにより、操作部が受け付けた操作量が比較的大きい場合でも、速度指令値および加速度指令値の両方が制限されるので、アームの単位時間当たりの移動量が大きくなるのが抑制される。このため、アームの関節部に設けられるモータが過度に高速に回転するのが抑制されるので、アームの関節部を構成するモータなどの部品を保護することができる。また、アームの単位時間当たりの移動量が大きくなるのが抑制されるので、アームの単位時間当たりの移動量が大きくなることに起因するアームの振動を抑制することができる。これらの結果、アームの関節部を構成する部品を保護するとともに、アームの振動を抑制することが可能な手術支援システムの制御装置を提供することができる。
【0010】
この発明の第3の局面による手術支援システムの制御方法は、先端側に医療器具が取り付けられ複数の関節部を有するアームを含む患者側装置と、医療器具に対する操作を受け付ける操作部を含む操作者側装置と、制御部と、を備える手術支援システムの制御方法であって、操作部が、医療器具に対する操作を受け付けるステップと、制御部が、受け付けられた操作に基づいて、医療器具を動作させる際の速度指令値および加速度指令値を算出し、速度指令値および加速度指令値に基づいて医療器具の動作を制御するステップと、を備え、制御部が、速度指令値および加速度指令値に基づいて医療器具の動作を制御するステップは、制御部が、制限前の速度指令値を複数の関節部の軸毎に算出し、軸毎の速度指令値同士の一定の関係が崩れるのが抑制されるように、軸毎の速度指令値を速度制限値の範囲内に制限するステップと、制御部が、制限前の加速度指令値を複数の関節部の軸毎に算出し、軸毎の加速度指令値の一定の関係が崩れるのが抑制されるように、加速度指令値を加速度制限値の範囲内に制限するステップと、を含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
短下肢装具
2か月前
個人
洗井間専家。
5か月前
個人
前腕誘導装置
2か月前
個人
嚥下鍛錬装置
2か月前
個人
歯の修復用材料
3か月前
個人
バッグ式オムツ
3か月前
個人
ホバーアイロン
5か月前
個人
胸骨圧迫補助具
18日前
個人
矯正椅子
3か月前
個人
アイマスク装置
27日前
個人
陣痛緩和具
2か月前
個人
シャンプー
5か月前
個人
湿布連続貼り機。
1か月前
個人
歯の保護用シール
3か月前
個人
哺乳瓶冷まし容器
2か月前
株式会社八光
剥離吸引管
3か月前
個人
治療用酸化防御装置
12日前
個人
性行為補助具
1か月前
個人
エア誘導コルセット
22日前
株式会社大野
骨壷
2か月前
株式会社ニデック
眼科装置
6日前
株式会社ニデック
眼科装置
3か月前
個人
高気圧環境装置
3か月前
個人
形見の製造方法
3か月前
個人
手指運動ツール
1か月前
株式会社GSユアサ
歩行器
4か月前
株式会社ダリヤ
毛髪化粧料
4日前
株式会社松風
口腔用組成物
2か月前
株式会社コロナ
サウナ装置
4か月前
個人
シリンダ式歩行補助具
1か月前
株式会社ニデック
検眼装置
2か月前
株式会社ニデック
眼科装置
6日前
クラシエ株式会社
皮膚化粧料
2か月前
東ソー株式会社
歯科ブランク
3か月前
株式会社コーセー
油性化粧料
2か月前
東ソー株式会社
歯科ブランク
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ