TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025129688
公報種別
公開特許公報(A)
公開日
2025-09-05
出願番号
2024026495
出願日
2024-02-26
発明の名称
固定子及び可変磁束モータ
出願人
国立大学法人信州大学
,
山洋電気株式会社
代理人
弁理士法人信栄事務所
主分類
H02K
21/16 20060101AFI20250829BHJP(電力の発電,変換,配電)
要約
【課題】モータのトルクの低下を抑制しつつ、トルクリプルを低減する固定子、および、モータまたは発電機を提供する。
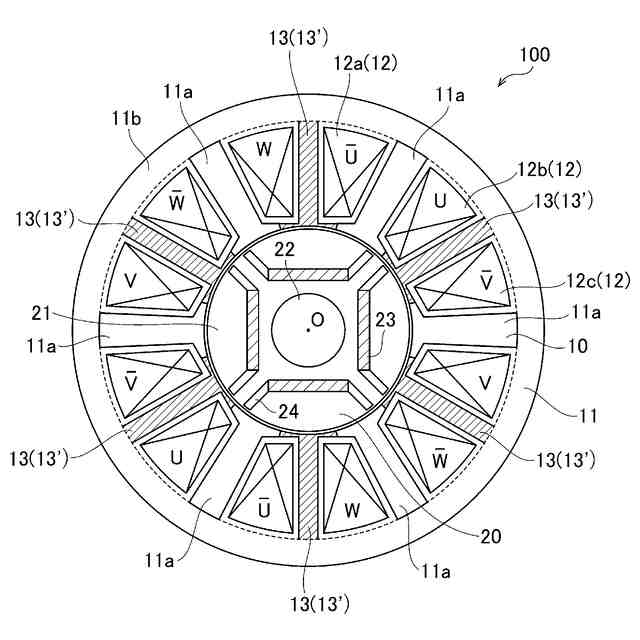
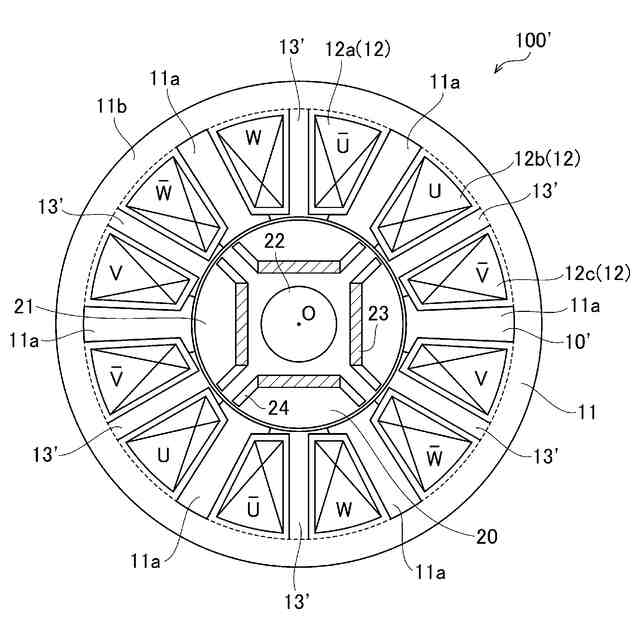
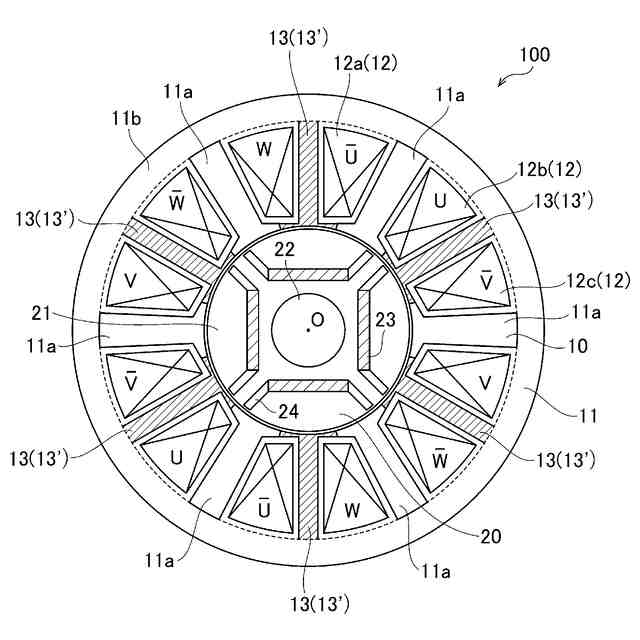
【解決手段】集中巻きの固定子10であって、巻線で巻回されている複数の主磁極11aと、複数の主磁極11aの間に設けられた補助磁極13と、を備え、高負荷時に補助磁極13が磁気的に飽和することで、低負荷時よりも巻き線の鎖交磁束が増大する。
【選択図】図2
特許請求の範囲
【請求項1】
集中巻きの固定子であって、
巻線で巻回されている複数の主磁極と、
複数の前記主磁極の間に設けられた補助磁極と、
を備え、
高負荷時に前記補助磁極が磁気的に飽和することで、低負荷時よりも前記巻き線の鎖交磁束が増大する、固定子。
続きを表示(約 790 文字)
【請求項2】
低負荷時にはm極2nスロットの電機子として機能し、
高負荷時に前記補助磁極が磁気的に飽和することで、m極nスロットの電機子として機能し、
m、nは自然数である、請求項1に記載の固定子。
【請求項3】
前記m極nスロットの巻線係数をkw1、
前記m極2nスロットの巻線係数をkw2と定義すると、
kw1>kw2となるように電機子巻線が配置されている、請求項2に記載の固定子。
【請求項4】
前記主磁極を構成する軟磁性材料の飽和磁化をMs1、
前記補助磁極を構成する軟磁性材料の飽和磁化をMs2と定義すると、
Ms1>Ms2の関係を有する、請求項2に記載の固定子。
【請求項5】
前記主磁極を構成する軟磁性材料の比透磁率をμr1、
前記補助磁極を構成する軟磁性材料の比透磁率をμr2と定義すると、
μr1<μr2の関係を有する、請求項2に記載の固定子。
【請求項6】
前記主磁極を構成する軟磁性材料の比透磁率をμr1、
前記補助磁極を構成する軟磁性材料の比透磁率をμr2と定義すると、
μr1<μr2の関係を有する、請求項3に記載の固定子。
【請求項7】
前記補助磁極は補助巻線で巻回されている、請求項1に記載の固定子。
【請求項8】
前記主磁極の前記巻線と前記補助巻線は、互いに異なる回路に接続可能である、請求項7に記載の固定子。
【請求項9】
前記補助磁極は、能動的可変磁束動作及び受動的可変磁束動作が可能である、請求項7に記載の固定子。
【請求項10】
前記補助磁極は、回生動作が可能である、請求項7に記載の固定子。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、固定子及び可変磁束モータに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
モータの稼働中に界磁磁束量を変化させる可変磁束効果を備えた可変磁束モータが提案されている。例えば、特許文献1に、低負荷時と高負荷時での高効率化のため、回転子に永久磁石の磁束の一部を逃すバイパス路を設けた可変磁束モータが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-17783号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されている可変磁束モータは、回転子にバイパス路を設けるが、モータの稼働中における回転子の遠心力強度を考慮する必要があることから、設計の自由度が制限される。そのため、固定子に可変磁束構造を備えた可変磁束モータが求められる。
【0005】
本発明は、低負荷時と高負荷時での効率が高い、可変磁束構造を備えた固定子、及び当該固定子を備えた可変磁束モータを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一側面に係る集中巻きの固定子は、
巻線で巻回されている複数の主磁極と、
複数の前記主磁極の間に設けられた補助磁極と、を備え、
高負荷時に前記補助磁極が磁気的に飽和することで、低負荷時よりも巻き線の鎖交磁束が増大する。
【0007】
本発明の一側面に係る可変磁束モータは、
上記固定子と、回転子と、を備える。
【発明の効果】
【0008】
本発明によれば、低負荷時と高負荷時での効率が高い、可変磁束構造を備えた固定子、及び当該固定子を備えた可変磁束モータを提供することができる。
【図面の簡単な説明】
【0009】
参考例に係るモータの回転軸線に直行する水平方向断面図である。
本実施形態に係るモータの回転軸線に直行する水平方向断面図である。
参考例に係るモータの効率マップである。
本実施形態に係るモータの効率マップである。
参考例に係るモータの磁束密度分布を示す図である。
本実施形態に係るモータの磁束密度分布を示す図である。
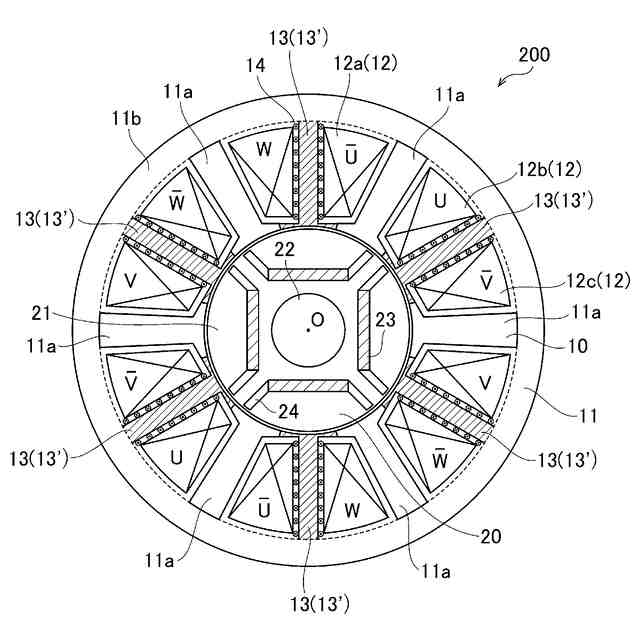
他の実施形態に係るモータの回転軸線に直行する水平方向断面図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照しながら説明する。尚、実施形態の説明において既に説明された部材と同一の参照番号を有する部材については、説明の便宜上、その説明は省略する。また、本図面に示された各部材の寸法は、説明の便宜上、実際の各部材の寸法とは異なる場合がある。
[参考例]
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ