TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025128763
公報種別
公開特許公報(A)
公開日
2025-09-03
出願番号
2024025661
出願日
2024-02-22
発明の名称
多方向入力装置
出願人
パナソニックIPマネジメント株式会社
代理人
個人
,
個人
,
個人
主分類
G05G
5/05 20060101AFI20250827BHJP(制御;調整)
要約
【課題】安定して操作軸部を中立復帰させることができる多方向入力装置を提供する。
【解決手段】傾倒可能な操作軸部30と、操作軸部30の第1方向への傾倒に連動して回転する第1カム部51を有する第1回転部材50と、第1カム部51によって駆動される第1被駆動部71aを有し、第1被駆動部71aの移動量を検出する第1検出体70と、を備え、操作軸部30が中立状態にあるときの第1接触面積は、操作軸部30が第1方向への傾倒状態にあるときの第1接触面積よりも大きく、第1接触面積は第1カム部51が第1被駆動部71aと接触する面積である。
【選択図】図1
特許請求の範囲
【請求項1】
傾倒可能な操作軸部と、
前記操作軸部の第1方向への傾倒に連動して回転する第1カム部を有する第1回転部材と、
前記第1カム部によって駆動される第1被駆動部を有し、前記第1被駆動部の移動量を検出する第1検出体と、を備え、
前記操作軸部が中立状態にあるときの第1接触面積は、前記操作軸部が前記第1方向への傾倒状態にあるときの前記第1接触面積よりも大きく、前記第1接触面積は前記第1カム部が前記第1被駆動部と接触する面積である、
多方向入力装置。
続きを表示(約 1,100 文字)
【請求項2】
前記第1回転部材は、前記操作軸部の前記第1方向とは逆の方向への傾倒に連動して回転する第2カム部をさらに有し、
前記多方向入力装置は、前記第2カム部によって駆動される第2被駆動部を有し、前記第2被駆動部の移動量を検出する第2検出体をさらに備え、
前記操作軸部が中立状態にあるときの第2接触面積は、前記操作軸部が前記第1方向とは逆の方向への傾倒状態にあるときの前記第2接触面積よりも大きく、前記第2接触面積は前記第2カム部が前記第2被駆動部と接触する面積である、
請求項1に記載の多方向入力装置。
【請求項3】
前記操作軸部の第1方向と直交する第2方向への傾倒に連動して回転する第3カム部を有する第2回転部材と、
前記第3カム部によって駆動される第3被駆動部を有し、前記第3被駆動部の移動量を検出する第3検出体と、をさらに備え、
前記操作軸部が中立状態にあるときの第3接触面積は、前記操作軸部が前記第2方向への傾倒状態にあるときの前記第3接触面積よりも大きく、前記第3接触面積は前記第3カム部が前記第3被駆動部と接触する面積である、
請求項1又は2に記載の多方向入力装置。
【請求項4】
前記第2回転部材は、前記操作軸部の前記第2方向とは逆の方向への傾倒に連動して回転する第4カム部をさらに有し、
前記多方向入力装置は、前記第4カム部によって駆動される第4被駆動部を有し、前記第4被駆動部の移動量を検出する第4検出体をさらに備え、
前記操作軸部が中立状態にあるときの第4接触面積は、前記操作軸部が前記第2方向とは逆の方向への傾倒状態にあるときの前記第4接触面積よりも大きく、前記第4接触面積は前記第4カム部が前記第4被駆動部と接触する面積である、
請求項3に記載の多方向入力装置。
【請求項5】
前記第1回転部材は、複数の前記第1カム部を有する、
請求項1又は2に記載の多方向入力装置。
【請求項6】
前記第1カム部は、前記第1被駆動部と接触する複数の面を有する、
請求項1又は2に記載の多方向入力装置。
【請求項7】
前記第1検出体は、前記第1被駆動部に連動して動く可動電極を備え、前記可動電極の変位により変動する前記第1検出体の静電容量に基づいて、前記第1被駆動部の移動量を検出する、
請求項1又は2に記載の多方向入力装置。
【請求項8】
前記第1検出体は、前記第1被駆動部に連動して変形する導電ゴムを備え、前記導電ゴムの変形により変動する前記第1検出体の静電容量に基づいて、前記第1被駆動部の移動量を検出する、
請求項7に記載の多方向入力装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、多方向入力装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ジョイスティックなどの多方向入力装置においては、操作スティックの傾きを検出するために、回転型可変抵抗器が搭載されている(例えば、特許文献1参照)。
【0003】
また、操作スティックの傾倒によって押圧され、付与される圧力に応じて静電容量が変化する感圧センサを有する多方向入力装置において、この静電容量の変化量を検出することで、操作スティックの傾きを検出する技術が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/229783号
国際公開第2023/062887号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に係る多方向入力装置に搭載されている回転型可変抵抗器は、抵抗体上を摺動子が摺動することで抵抗値が変化し、この変化した抵抗値に基づいて操作スティック(以下、「操作軸部」という。)の傾倒が検出される。しかし、摺動子が抵抗体上を摺動すると、その摩擦によって抵抗体が摩耗し、粉塵が発生する場合がある。この粉塵が摺動子に付着すると、抵抗値の変動が不安定になり中立復帰が安定しない場合がある。ここで、中立復帰とは、操作軸部が操作を受けていない場合に、中立として定められた基準位置に操作軸部が復帰することである。
【0006】
また、特許文献2に係る多方向入力装置では、操作軸部の中立復帰動作機構は、従来の可変抵抗器の構造を踏襲している。この構造は、底面の摩擦摺動に依存する為、摺動面の仕上がりや動作耐久後の摺動面変化によって、中立復帰が安定しない場合がある。
【0007】
そこで、本開示の目的は、安定して操作軸部を中立復帰させることができる多方向入力装置を提供することである。
【課題を解決するための手段】
【0008】
本開示の一態様に係る多方向入力装置は、傾倒可能な操作軸部と、前記操作軸部の第1方向への傾倒に連動して回転する第1カム部を有する第1回転部材と、前記第1カム部によって駆動される第1被駆動部を有し、前記第1被駆動部の移動量を検出する第1検出体と、を備え、前記操作軸部が中立状態にあるときの第1接触面積は、前記操作軸部が前記第1方向への傾倒状態にあるときの前記第1接触面積よりも大きく、前記第1接触面積は前記第1カム部が前記第1被駆動部と接触する面積である、多方向入力装置である。
【発明の効果】
【0009】
本開示の一態様によれば、安定して操作軸部を中立復帰させることができる多方向入力装置を提供することができる。
【図面の簡単な説明】
【0010】
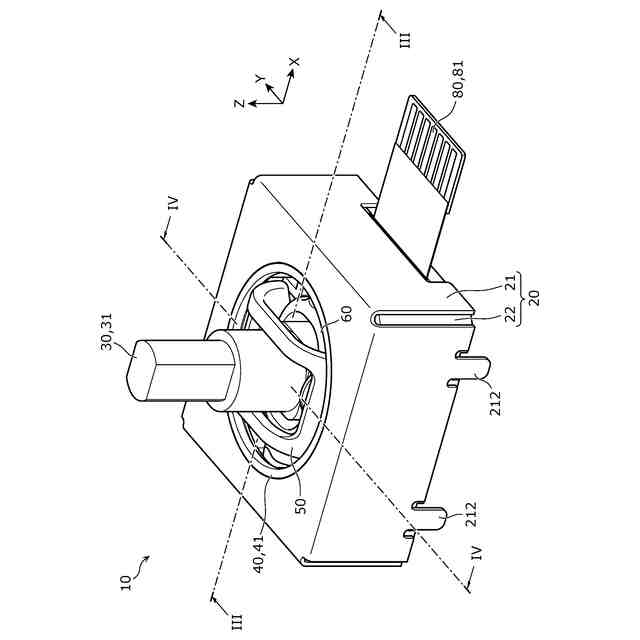
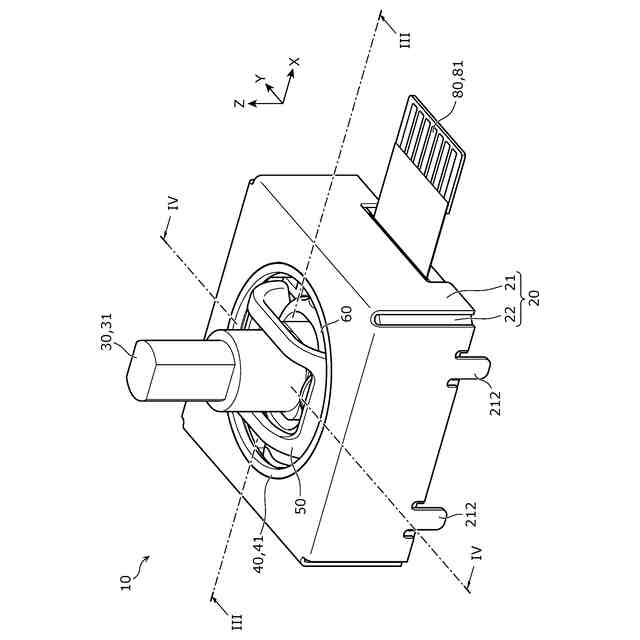
実施の形態に係る多方向入力装置の外観を示す斜視図
実施の形態に係る多方向入力装置の分解斜視図
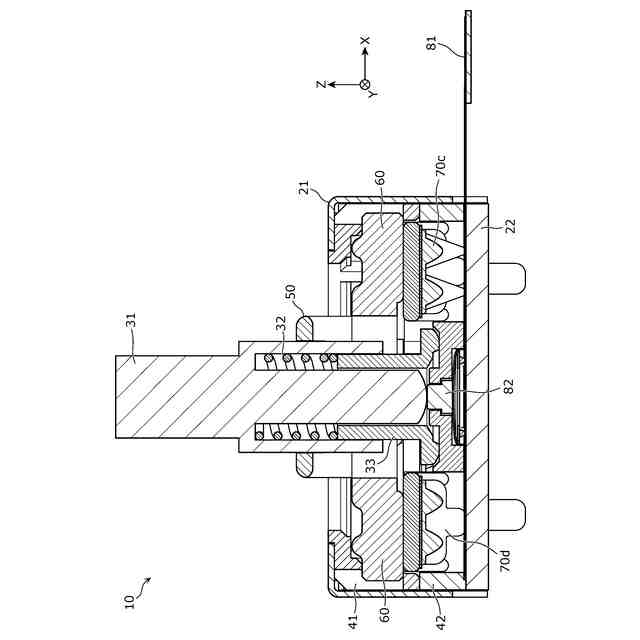
実施の形態に係る多方向入力装置の断面図
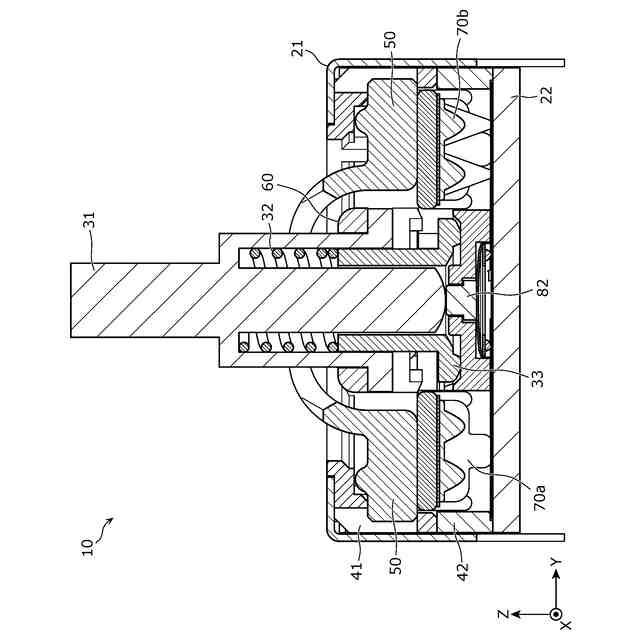
実施の形態に係る多方向入力装置の他の断面図
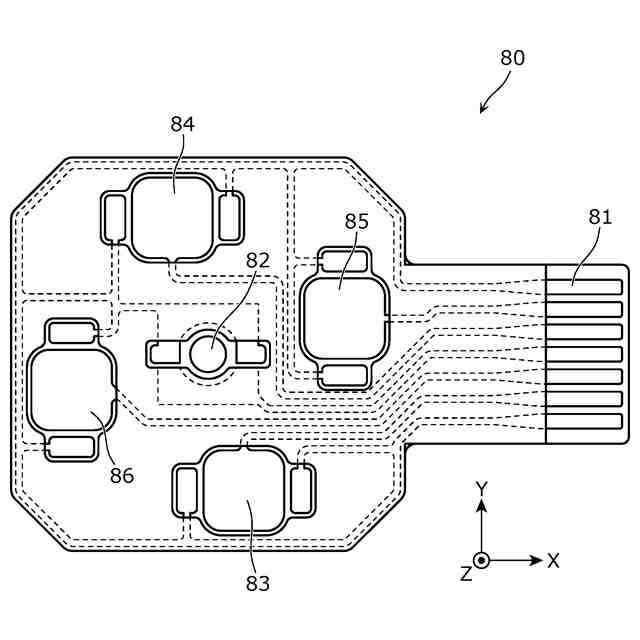
実施の形態に係る基板の平面視を示す図
実施の形態に係る位置決め部材の分解斜視図
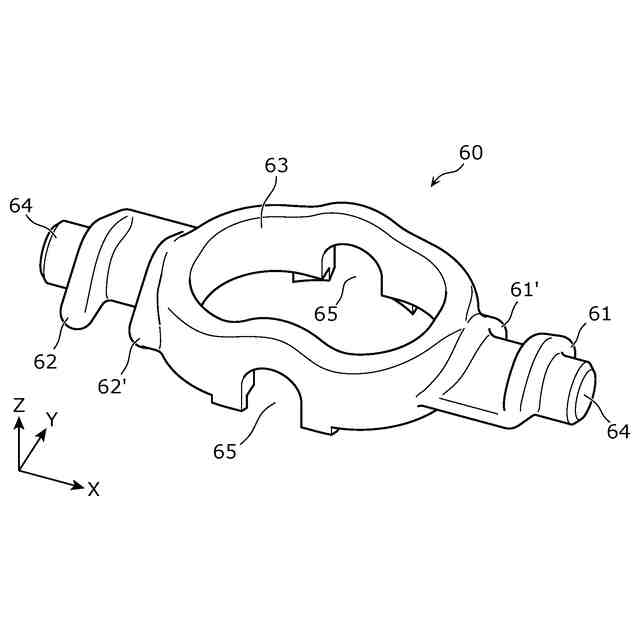
実施の形態に係る第1回転部材の斜視図
実施の形態に係る第2回転部材の斜視図
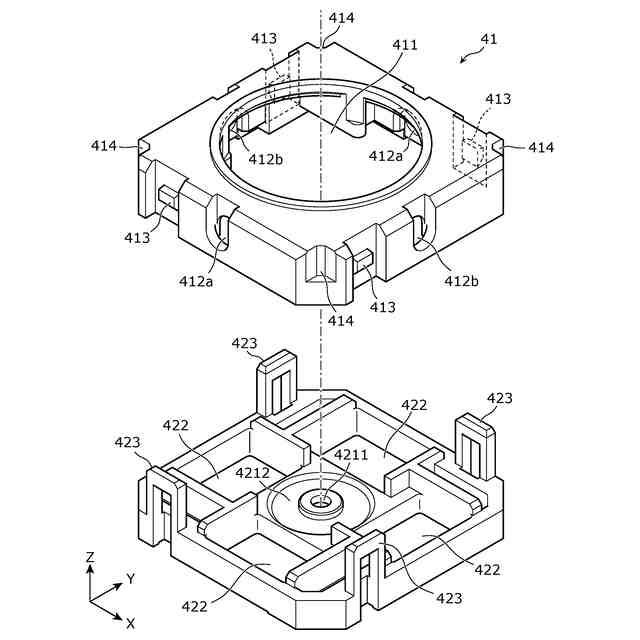
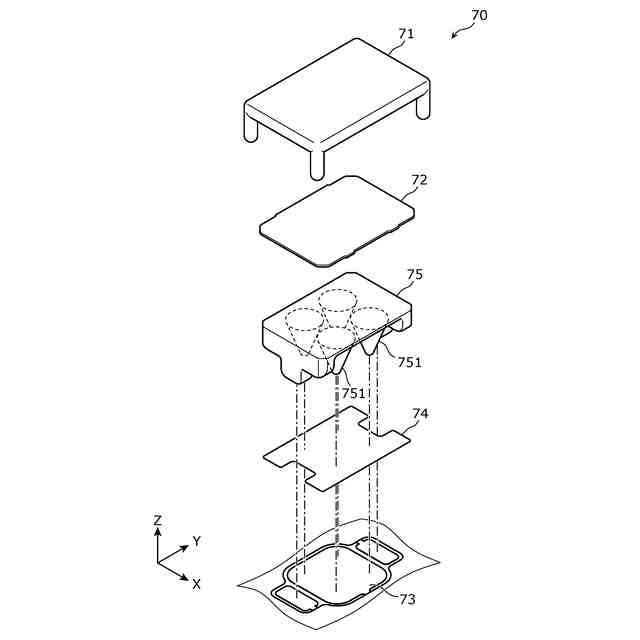
実施の形態に係る検出体の分解斜視図
実施の形態に係る多方向入力装置において、操作軸部がX軸プラス方向へ傾倒した状態にあるときの多方向入力装置の断面図
実施の形態に係る第1回転部材において、操作軸部が中立状態にあるときの第1カム部と第1被駆動部が接触する様子を示す図
実施の形態に係る第1回転部材において、操作軸部がX軸プラス方向へ傾倒した状態にあるときの第1カム部と第1被駆動部が接触する様子を示す図
実施の形態に係る多方向入力装置における操作軸部の傾倒角度と検出体の変位量の関係を示す図
実施の形態に係る多方向入力装置において、操作軸部がX軸方向及びY軸方向のそれぞれに傾いて傾倒した状態にあるときの操作軸部周辺の部材の様子を示す図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
16日前
株式会社ダイヘン
移動体
3か月前
愛知製鋼株式会社
車両用システム
24日前
ローム株式会社
基準電圧源
13日前
株式会社FUJI
加工機械ライン
2か月前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
生産管理システム
1か月前
トヨタ自動車株式会社
ペダル機構
4か月前
株式会社ダイフク
搬送設備
4か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
20日前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社ダイフク
搬送設備
2日前
三菱電機株式会社
自己位置推定装置
4か月前
株式会社オプトン
制御プログラム生成装置
2か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
株式会社鷺宮製作所
制御装置
2か月前
キヤノン株式会社
配送システム
16日前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
27日前
株式会社ダイフク
物品搬送設備
2日前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
3か月前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
3か月前
トヨタ自動車株式会社
移動体、及び制御方法
4か月前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































