TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123330
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025098193,2023566254
出願日
2025-06-12,2022-11-29
発明の名称
車両制御装置、車両制御方法、及び車両制御システム
出願人
Astemo株式会社
代理人
個人
,
個人
主分類
B60W
30/10 20060101AFI20250815BHJP(車両一般)
要約
【課題】目標軌道への追従制御性能を確保しながら、想定外の車両挙動の発生を抑制できる、車両制御装置、車両制御方法、及び車両制御システムを提供する。
【解決手段】本発明に係る車両制御装置、車両制御方法、及び車両制御システムによれば、その一態様として、車両を走行させる目標軌道を演算する第1の時刻で求められた第1の目標軌道のうち、前記第1の時刻から次の目標軌道の演算周期である第2の時刻までの間に前記車両が進む分と、前記第1の目標軌道に設定された第1の目標位置と、を含む軌道を保持して、前記第2の時刻での第2の目標軌道を求める。
【選択図】図9
特許請求の範囲
【請求項1】
入力した情報に基づいて演算した結果を出力するコントロール部を備える車両制御装置であって、
前記コントロール部は、
車両を走行させる目標軌道を演算する第1の時刻で求められた第1の目標軌道のうち、前記第1の時刻から次の目標軌道の演算周期である第2の時刻までの間に前記車両が進む分と、前記第1の目標軌道に設定された第1の目標位置と、を含む軌道を保持して、前記第2の時刻での第2の目標軌道を求め、
前記第2の目標軌道に設定された第2の目標位置に関する情報に基づいて前記車両を走行させるための制御指令を出力する、
車両制御装置。
続きを表示(約 680 文字)
【請求項2】
車両に搭載されたコントロールユニットが実行する車両制御方法であって、
前記コントロールユニットは、
車両を走行させる目標軌道を演算する第1の時刻で求められた第1の目標軌道のうち、前記第1の時刻からの次の演算周期である第2の時刻までの間に前記車両が進む分と、前記第1の目標軌道に設定された第1の目標位置と、を含む軌道を保持して、前記第2の時刻での第2の目標軌道を求め、
前記第2の目標軌道に設定された第2の目標位置に関する情報に基づいて前記車両を走行させるための制御指令を出力する、
車両制御方法。
【請求項3】
車両が走行する走行路の走行環境に関する情報を取得する外界認識部と、
前記車両の運動状態に関する情報を取得する車両運動状態取得部と、
入力した情報に基づいて演算した結果を出力するコントロール部であって、
前記車両を走行させる目標軌道を演算する第1の時刻で求められた第1の目標軌道のうち、前記第1の時刻から次の演算周期である第2の時刻までの間に前記車両が進む分と、前記第1の目標軌道に設定された第1の目標位置と、を含む軌道を保持して、前記第2の時刻での第2の目標軌道を求め、
前記第2の目標軌道に設定された第2の目標位置に関する情報に基づいて前記車両を走行させるための制御指令を出力する、
前記コントロール部と、
前記制御指令に基づいて、前記車両の運動状態を制御するアクチュエータ部と、
を備える、車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法、及び車両制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1の車両の走行制御方法は、自車両が走行すべき目標軌跡を検出し、検出した目標軌跡に沿って自車両を自動走行させる車両の走行制御方法であって、少なくとも走行車線情報に応じて、自車両から前方注視点までの前方注視点距離を仮設定し、前記仮設定された前方注視点距離を自車両が走行したと仮定した場合に、前記前方注視点において自車両が前記目標軌跡に一致する自車両の走行軌跡を推定し、自車両の現在位置から前記前方注視点に至る間の、推定された自車両の走行軌跡と前記目標軌跡との横変位の最大値を検出し、前記横変位の最大値が所定値以下である場合の前方注視点距離を、前方注視点距離として本設定したのち、当該本設定された前方注視点距離に基づいて、自車両を自動走行させる。
【先行技術文献】
【特許文献】
【0003】
特許第6610799号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
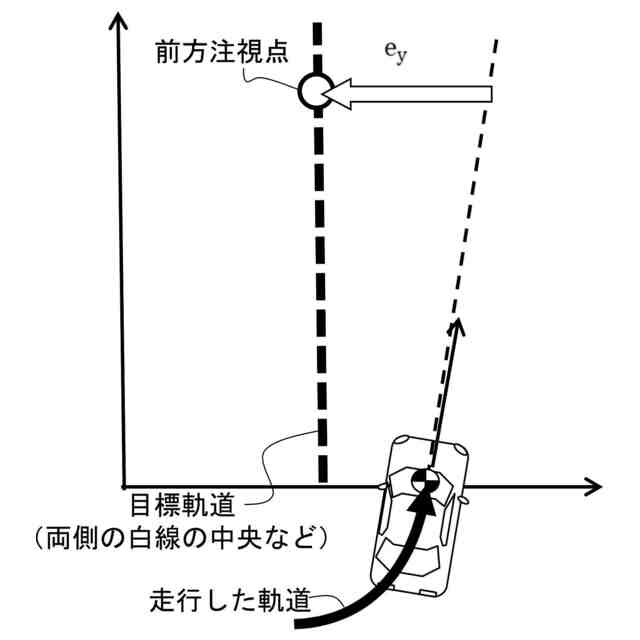
ところで、目標軌道に沿って車両を走行させる軌道追従制御として、たとえば、自車両の前方の目標軌道に設定される前方注視点を追従目標点として、車両の制御指令を生成する制御がある。
係る軌道追従制御において、目標軌道の形状が演算周期の前回と今回とで大きく変化すると、追従目標点が一足飛びに変位し、車両を追従目標点に追従させようとすることで、想定外の車両挙動を引き起こすおそれがあった。
ここで、追従目標点が一足飛びに変位することを抑止するために、目標軌道に対する車両の走行軌跡のずれ量が所定値以下となる距離に追従目標点を設定すると、追従目標点を自車両からより近い位置に設定することになるため、車両制御の応答遅れになどによって目標軌道への追従制御性能が悪化するおそれがあった。
【0005】
本発明は、従来の実情に鑑みてなされたものであり、その目的は、目標軌道への追従制御性能を確保しながら、想定外の車両挙動の発生を抑制できる、車両制御装置、車両制御方法、及び車両制御システムを提供することにある。
【課題を解決するための手段】
【0006】
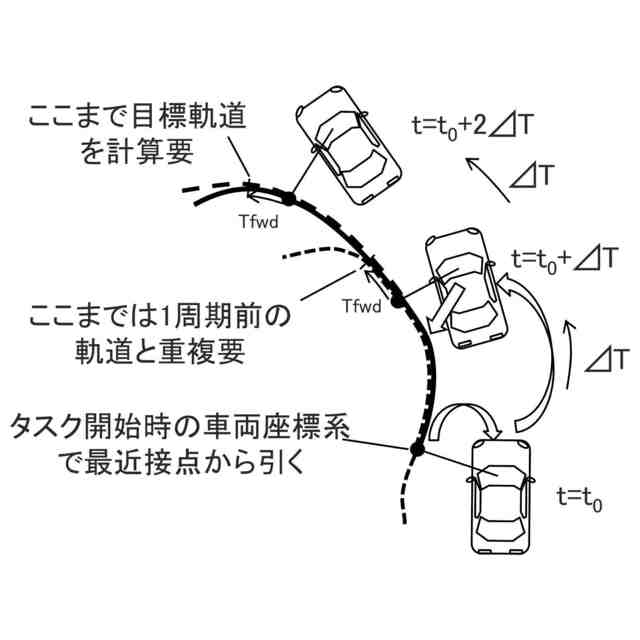
本発明によれば、その1つの態様において、車両を走行させる目標軌道を演算する第1の時刻で求められた第1の目標軌道のうち、前記第1の時刻から次の目標軌道の演算周期である第2の時刻までの間に前記車両が進む分と、前記第1の目標軌道に設定された第1の目標位置と、を含む軌道を保持して、前記第2の時刻での第2の目標軌道を求める。
【発明の効果】
【0007】
本発明によれば、目標軌道への追従制御性能を確保しながら、想定外の車両挙動の発生を抑制できる。
【図面の簡単な説明】
【0008】
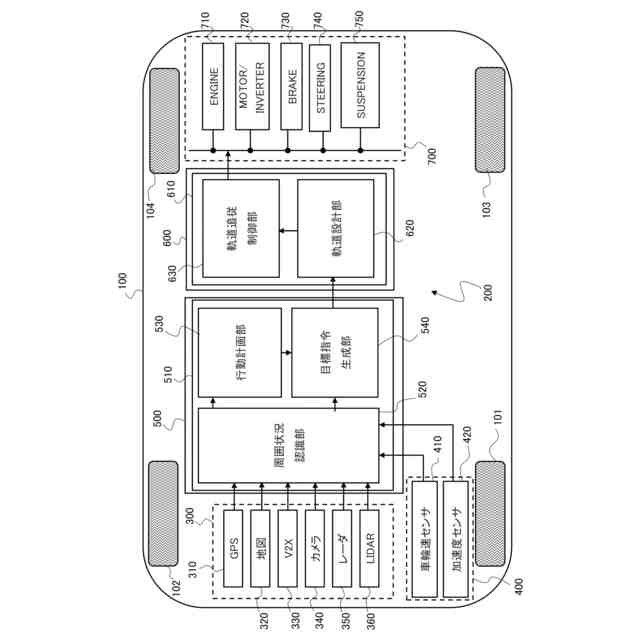
車両制御システムを示すブロック図である。
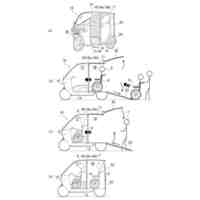
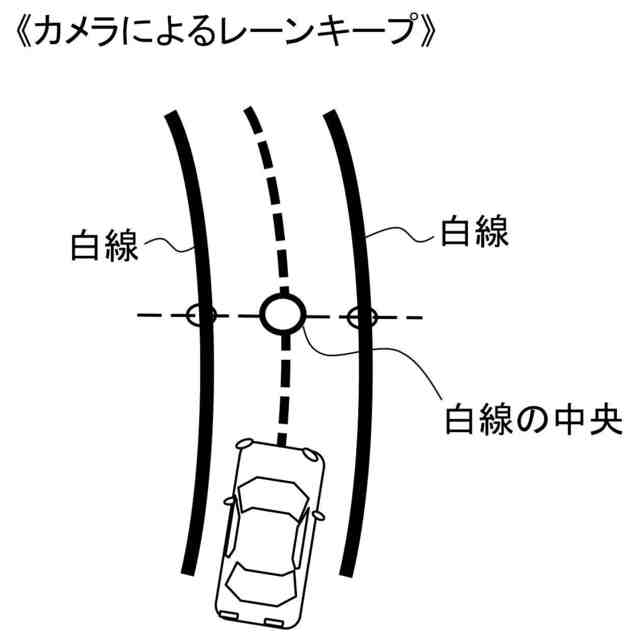
レーンキープ機能を概説する図である。
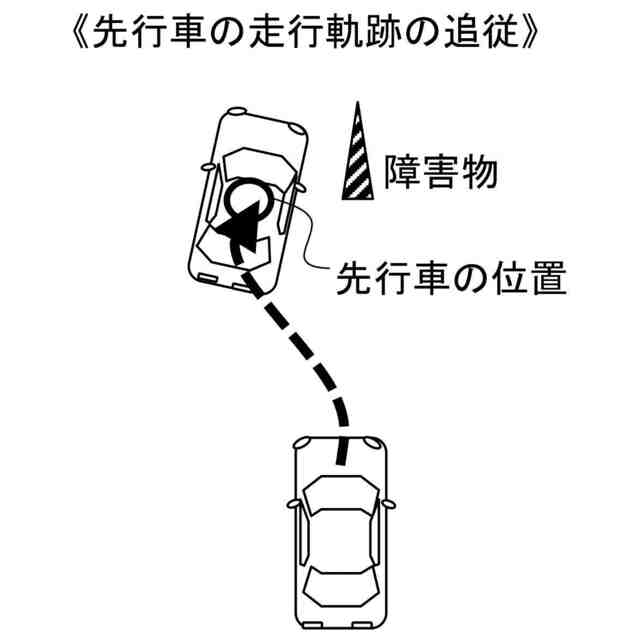
先行車追従機能を概説する図である。
経路追従機能を概説する図である。
左右偏差の求め方を示す図である。
軌道保持処理の作用、機能を示す図である。
目標軌道の長さの要求を示す図である。
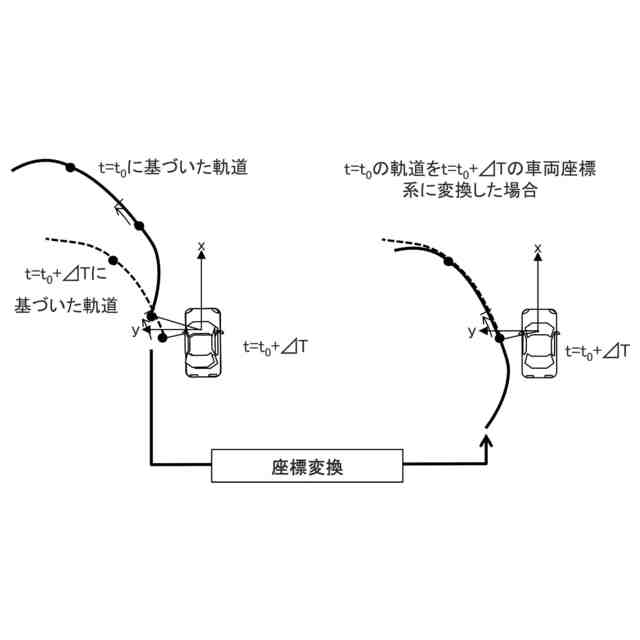
軌道保持処理における座標変換処理を示す図である。
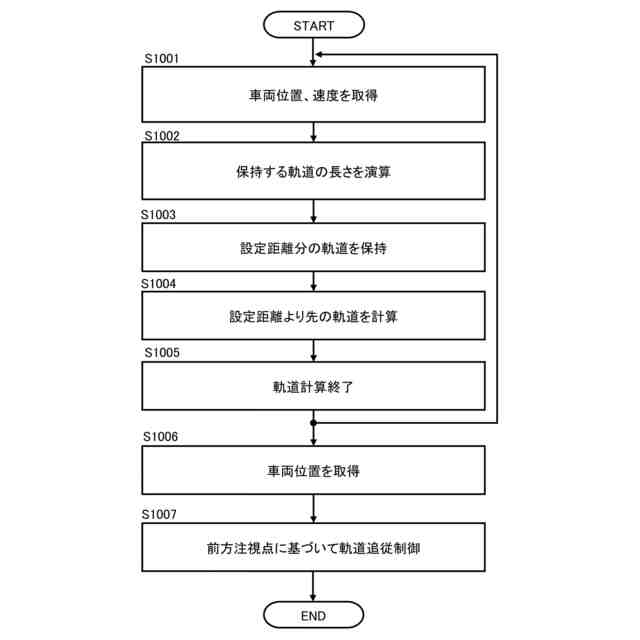
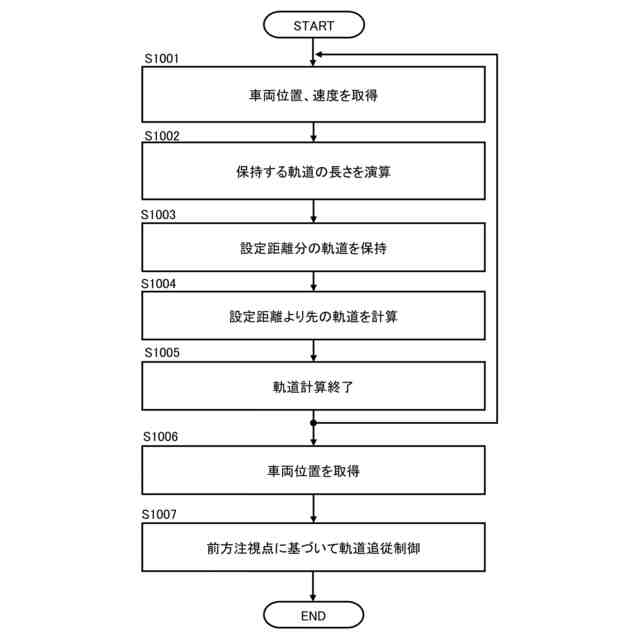
軌道保持処理を実施するときの制御プロセスを示すフローチャートである。
アプリケーションソフトウエアの切り替え時に軌道保持処理を実施する場合の制御プロセスを示すフローチャートである。
緊急回避時に軌道保持処理をキャンセルする場合の制御プロセスを示すフローチャートである。
軌道点列に基づく軌道追従制御の機能ブロック図である。
2つのマイクロコンピュータを備えた統合制御装置を含む車両制御システムを示すブロック図である。
1つのマイクロコンピュータを備えた統合制御装置を含む車両制御システムを示すブロック図である。
2つのマイクロコンピュータに対する機能部の振り分けパターンを例示するブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明に係る車両制御装置、車両制御方法、及び車両制御システムの実施形態を、図面に基づいて説明する。
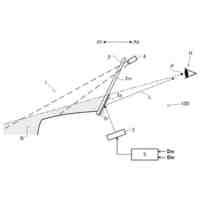
図1は、車両100に搭載される車両制御システム200の一態様を示すブロック図である。
車両100は、左右一対の前輪101,102及び左右一対の後輪103,104を備えた自動車である。
【0010】
車両制御システム200は、車両100の目標軌道を計画し、車両100が目標軌道に沿って走行するように、車両100の舵角、駆動力、制動力などを制御する、運転支援システム若しくは自動運転システムである。
車両制御システム200は、外界認識部300、車両運動状態取得部400、自動運転制御装置500、車両運動制御装置600、及び、アクチュエータ部700を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
前輪キャスター
7日前
個人
警告装置
4か月前
個人
車窓用防虫網戸
3か月前
個人
小型EVシステム
4か月前
個人
ルーフ付きトライク
24日前
個人
ホイルのボルト締結
2か月前
個人
タイヤ脱落防止構造
4日前
日本精機株式会社
ケース
4か月前
個人
車輪清掃装置
3か月前
個人
アンチロール制御装置
5か月前
日本精機株式会社
表示装置
1か月前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
14日前
個人
車両通過構造物
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
5か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
個人
アクセルのソフトウェア
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
キャンピングトレーラー
2か月前
個人
ワイパーゴム性能保持具
3か月前
個人
車両用スリップ防止装置
2か月前
個人
ブレーキシステム
5か月前
株式会社ニフコ
照明装置
12日前
個人
円湾曲ホイール及び球体輪
1か月前
株式会社クラベ
ヒータユニット
3か月前
個人
車載小物入れ兼雨傘収納具
2か月前
株式会社ニフコ
保持装置
2か月前
日本精機株式会社
車室演出装置
4日前
株式会社豊田自動織機
産業車両
28日前
日本精機株式会社
車載表示装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ