TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118102
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013215
出願日
2024-01-31
発明の名称
死角判定装置、方法及びプログラム、並びに、行動評価装置及びシステム
出願人
株式会社デンソーテン
代理人
弁理士法人 佐野特許事務所
主分類
H04N
7/18 20060101AFI20250805BHJP(電気通信技術)
要約
【課題】カメラの死角の有無を精度良く判定する。
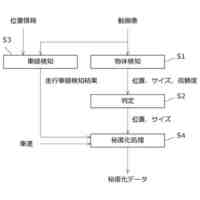
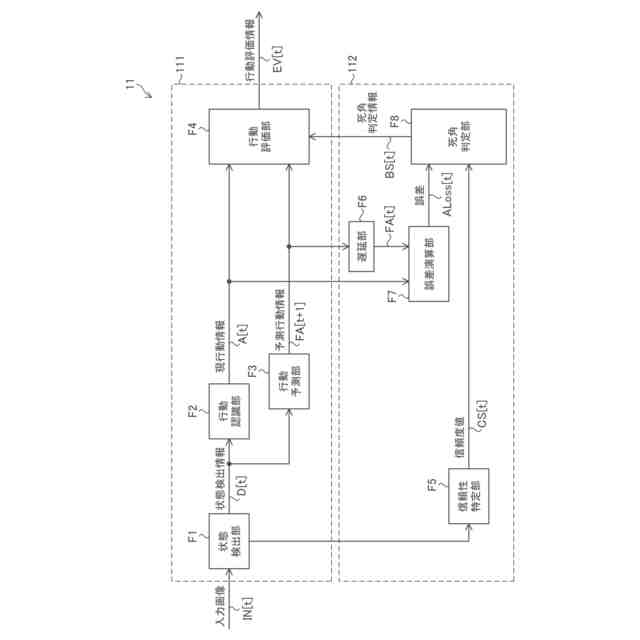
【解決手段】対象物を撮影するカメラからの入力画像(IN[t])に基づき対象物の状態検出情報(D[t])を導出する。状態検出情報(D[t])に基づき対象物の現在の行動を認識することにより現行動情報(A[t])を導出し且つ対象物の将来の行動を予測することにより予測行動情報(FA[t+1])を導出する。対象時刻での現行動情報(A[t])と、対象時刻前の予測にて導出された情報であって且つ対象時刻における対象物の行動の予測結果を示す予測行動情報(FA[t])と、の誤差(ALoss[t])を導出する。対象時刻での状態検出情報の確度を示す信頼度値(CS[t])と誤差(ALoss[t])とに基づき、対象物の撮影におけるカメラの死角の有無を判定する。
【選択図】図5
特許請求の範囲
【請求項1】
対象物を撮影するカメラからの入力画像に基づき前記対象物の状態を検出することで状態検出情報を導出し、
前記状態検出情報に基づき前記対象物の現在の行動を認識することにより現行動情報を導出するとともに前記状態検出情報に基づき前記対象物の将来の行動を予測することにより予測行動情報を導出し、
対象時刻での前記現行動情報と、前記対象時刻前の予測にて導出された情報であって且つ前記対象時刻における前記対象物の行動の予測結果を示す前記予測行動情報と、の誤差を導出し、
前記対象時刻での前記状態検出情報の確度を示す信頼度値と、前記誤差と、に基づき、前記対象物の撮影における前記カメラの死角の有無を判定する
、死角判定装置。
続きを表示(約 1,000 文字)
【請求項2】
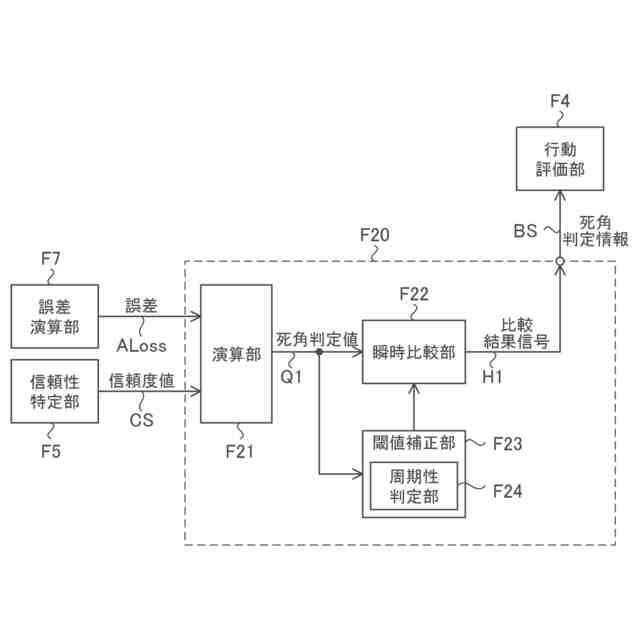
前記信頼度値及び前記誤差に応じた死角判定値を判定閾値と比較することで前記死角の有無を判定する
、請求項1に記載の死角判定装置。
【請求項3】
前記死角判定値が前記信頼度値の増大につれて増大し且つ前記誤差の増大につれて減少する場合、前記死角判定値が前記判定閾値より小さいときに前記死角が有ると判定する
、請求項2に記載の死角判定装置。
【請求項4】
基準期間において前記死角判定値が周期的に前記判定閾値を下回る場合、前記基準期間後における前記判定閾値を前記基準期間よりも増大させる
、請求項3に記載の死角判定装置。
【請求項5】
前記死角判定値が前記信頼度値の増大につれて減少し且つ前記誤差の増大につれて増大する場合、前記死角判定値が前記判定閾値より大きいときに前記死角が有ると判定する
、請求項2に記載の死角判定装置。
【請求項6】
基準期間において前記死角判定値が周期的に前記判定閾値を上回る場合、前記基準期間後における前記判定閾値を前記基準期間よりも減少させる
、請求項5に記載の死角判定装置。
【請求項7】
請求項1~6の何れかに記載の死角判定装置を備えた行動評価装置であって、
前記対象時刻での前記現行動情報と前記対象時刻での予測により得られた前記予測行動情報とに基づき前記対象物の行動に関わる行動評価情報を生成及び出力可能に構成され、前記死角が有ると判定したときには前記行動評価情報の生成又は出力を停止する
、行動評価装置。
【請求項8】
請求項1~6の何れかに記載の死角判定装置を備えた行動評価装置であって、
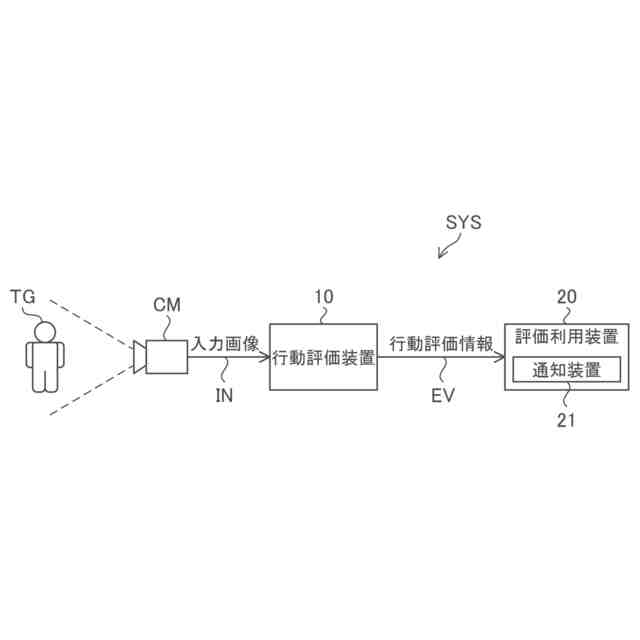
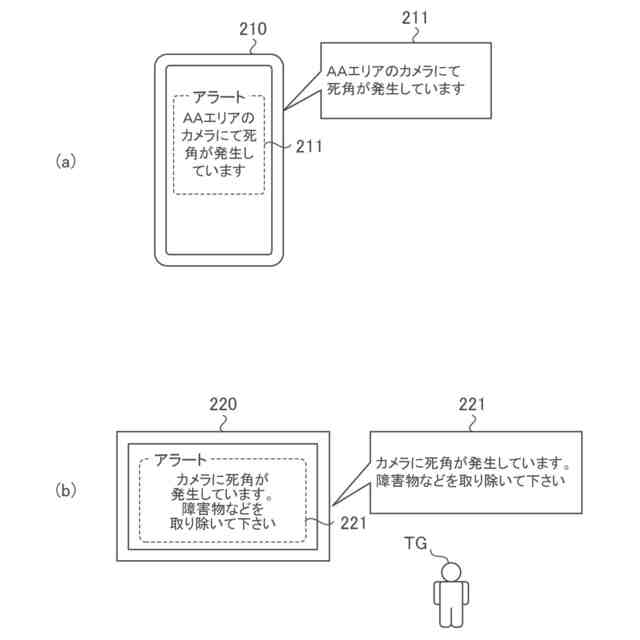
前記対象物としての人物又は他の人物に対し情報通知が可能な通知装置が前記行動評価装置に有線又は無線接続され、
前記行動評価装置は、前記死角が有ると判定されたとき、前記死角が有る旨を示す情報を前記通知装置から前記人物又は前記他の人物に通知させるための死角検知信号を、前記通知装置に出力する
、行動評価装置。
【請求項9】
請求項7に記載の行動評価装置と、
前記カメラと、を備える
、行動評価システム。
【請求項10】
請求項8に記載の行動評価装置と、
前記カメラと、を備える
、行動評価システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、死角判定装置、方法及びプログラム、並びに、行動評価装置及びシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
カメラによる撮影画像に基づき人物の状態(位置及び姿勢等)を検出し、その検出結果から人物の行動を認識(理解)及び予測するアルゴリズム又はAI(artificial intelligence)を有した装置がある。例えば、工場の作業者による作業の様子をカメラにて撮影する場合、当該アルゴリズム又はAIは作業者の作業安全性又は危険性の評価に利用される。或いは例えば、車両の運転者の様子をカメラにて撮影する場合、当該アルゴリズム又はAIは居眠り運転の予測に用いられる。
【0003】
但し、カメラと対象物(作業者又は運転者等)との間に障害物(任意の物体又は人物)が侵入することがあり、この際、カメラによる対象物の撮影において死角が発生する。死角の発生は、行動予測等における検知精度の低下及び誤作動の要因となる。尚、下記特許文献1には、視界が遮られる状況下での航空機の操縦支援技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-55024号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
死角の発生時には行動予測等をマスクするといった対応をとることで、システムの信頼性を担保することが可能である。但し、これの実現には死角の有無の検知技術が必要となる。死角の有無を精度良く判定できる技術の開発が求められる。
【0006】
また、死角の発生要因となる障害物の位置及び形状が分かっているならば、幾何学的な演算によりカメラの視野内の障害物による遮蔽領域を特定できる。そして、遮蔽領域内に対象物(作業者又は運転者等)が位置するかを判断することで、対象物の撮影に死角が生じているかを検知可能である。しかしながら、この検知を行う方法(以下、参考方法と称する)では、カメラの設置位置及び向きとの関係で障害物の位置及び形状等の情報をシステムに入力する又はシステムにて検出する必要がある。このため、汎用性が求められる製品への適用には、設定、調整又は情報入力等の作業面で課題があり、参考方法は実用性が低い。また、障害物の位置が様々に変動し得るケースでの対応が難しいことからも、参考方法は実用性が低い。
【0007】
本発明は、カメラの死角の有無を精度良く判定できる技術を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る死角判定装置は、対象物を撮影するカメラからの入力画像に基づき前記対象物の状態を検出することで状態検出情報を導出する。当該死角判定装置は、前記状態検出情報に基づき前記対象物の現在の行動を認識することにより現行動情報を導出するとともに前記状態検出情報に基づき前記対象物の将来の行動を予測することにより予測行動情報を導出する。当該死角判定装置は、対象時刻での前記現行動情報と、前記対象時刻前の予測にて導出された情報であって且つ前記対象時刻における前記対象物の行動の予測結果を示す前記予測行動情報と、の誤差を導出する。当該死角判定装置は、前記対象時刻での前記状態検出情報の確度を示す信頼度値と、前記誤差と、に基づき、前記対象物の撮影における前記カメラの死角の有無を判定する。
【発明の効果】
【0009】
対象物を撮影するカメラからの入力画像に基づき対象物の状態が検出されることから、対象物の撮影においてカメラに死角が有るとき、死角が無いときと比べて状態検出情報の信頼性が低下し、信頼性の低下が信頼度値に反映される。但し、死角があったとしても死角のサイズが小さかったならば信頼性は低くなり難い。故に状態検出情報の確度を示す信頼度値のみでは、死角の有無を正確に判定できないこともある。一方で、対象時刻にて死角が発生する場合、対象物の状態検出情報に基づき導出される現行動情報と予測行動情報との間に乖離が生じることから、上記誤差が増大する。これらを考慮し、上記の信頼度値及び誤差の双方に基づき死角の有無判定を行う。これにより、死角の有無を精度良く判定できる。
【図面の簡単な説明】
【0010】
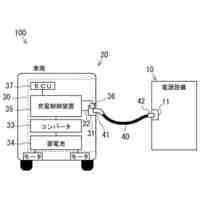
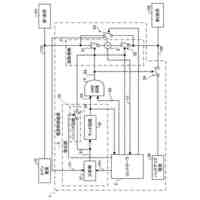
本発明の実施形態に係るシステムの全体構成図である。
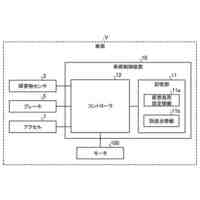
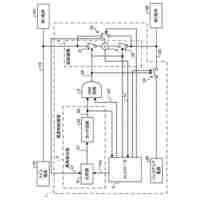
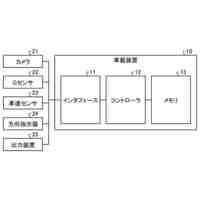
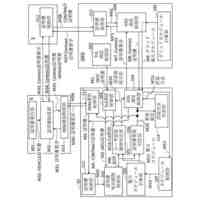
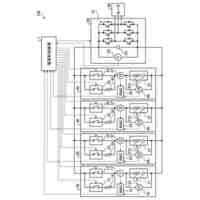
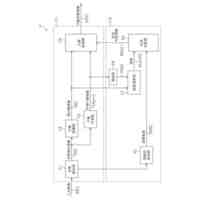
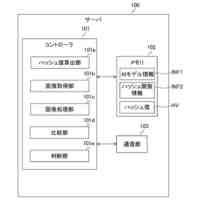
本発明の実施形態に係る行動評価装置の内部ブロック図である。
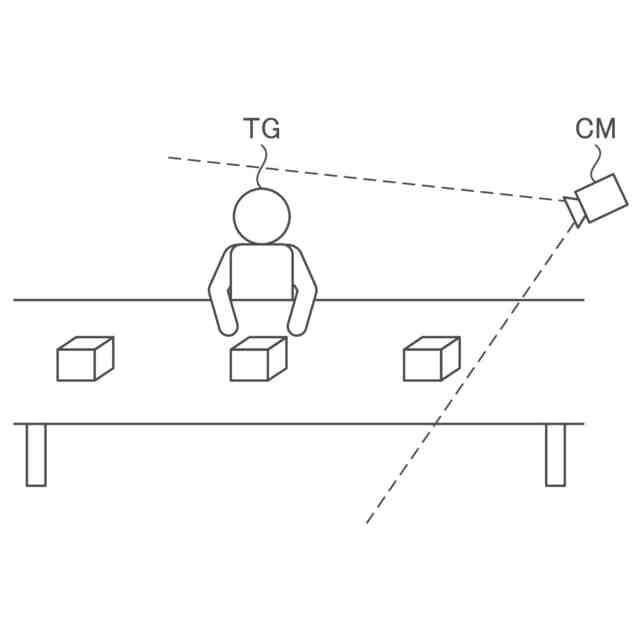
本発明の実施形態に係り、カメラとカメラの撮影対象(対象者)との関係図である。
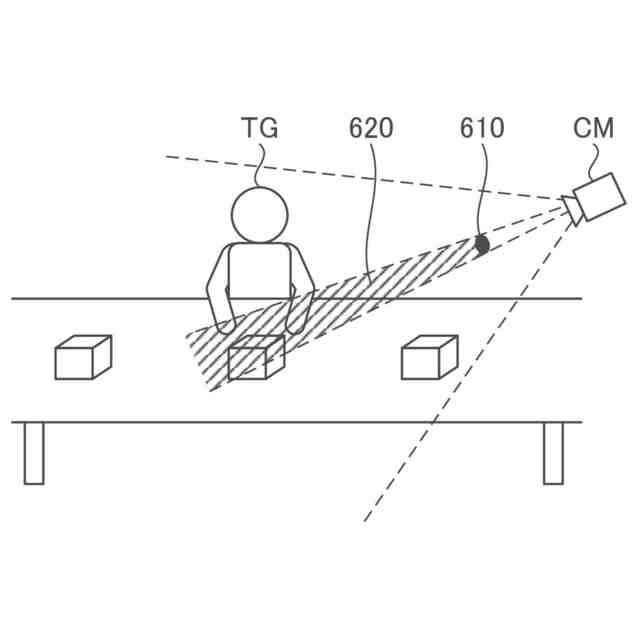
本発明の実施形態に係り、カメラ、撮影対象(対象者)及び障害物間の関係と、死角領域を示す図である。
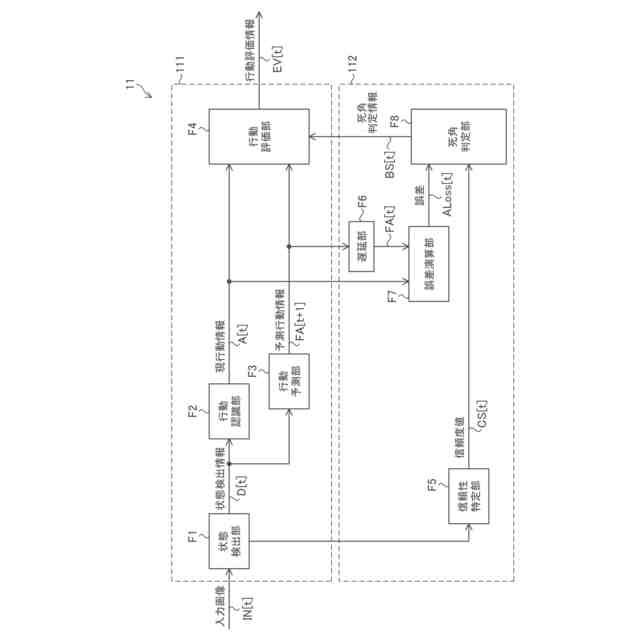
本発明の実施形態に属する第1実施例に係り、行動評価装置内のコントローラの機能ブロック図である。
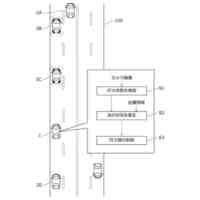
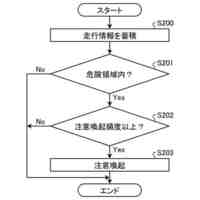
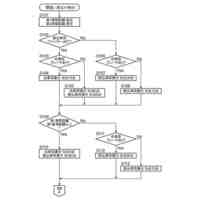
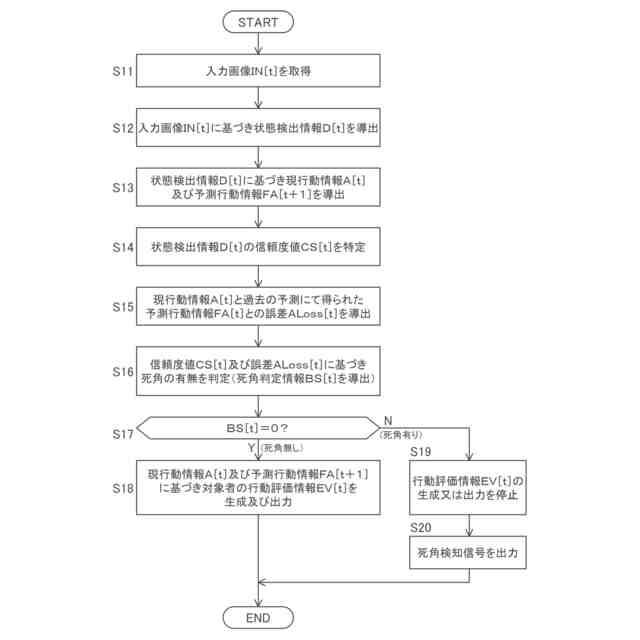
本発明の実施形態に属する第1実施例に係り、行動評価装置の動作フローチャートである。
本発明の実施形態に属する第1実施例に係り、通知装置における通知内容の例を示す図である。
本発明の実施形態に属する第2実施例に係り、行動評価装置内のコントローラの一部機能ブロック図である。
本発明の実施形態に属する第2実施例に係り、死角判定値及び比較結果信号の時系列変化を示す図である。
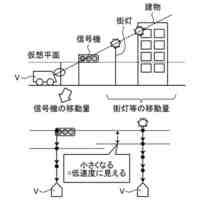
本発明の実施形態に属する第3実施例に係り、対象者の位置が周期的に変動する様子を説明するための図である。
本発明の実施形態に属する第3実施例に係り、行動評価装置内のコントローラの一部機能ブロック図である。
本発明の実施形態に属する第3実施例に係り、死角判定値及び比較結果信号の時系列変化を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソーテン
電源制御装置
27日前
株式会社デンソーテン
制御装置及び車両
12日前
株式会社デンソーテン
電源回路および制御装置
6日前
株式会社デンソーテン
制御装置および制御方法
19日前
株式会社デンソーテン
回路、および制御システム
17日前
株式会社デンソーテン
車載装置およびプログラム
1か月前
株式会社デンソーテン
算出装置および算出プログラム
14日前
株式会社デンソーテン
電源制御装置およびプログラム
13日前
株式会社デンソーテン
車両制御装置および車両制御方法
1か月前
株式会社デンソーテン
運転支援装置、および、プログラム
19日前
株式会社デンソーテン
運転支援装置、および、プログラム
27日前
株式会社デンソーテン
電源制御装置および診断プログラム
24日前
株式会社デンソーテン
車載装置、携帯端末、及びプログラム
今日
株式会社デンソーテン
充電制御装置及び充電制御プログラム
13日前
株式会社デンソーテン
画像処理装置及び画像処理プログラム
1か月前
株式会社デンソーテン
電源制御装置および電源制御システム
26日前
株式会社デンソーテン
電源制御装置および電源制御プログラム
24日前
株式会社デンソーテン
電源制御装置および電源制御プログラム
1か月前
株式会社デンソーテン
画像処理装置および画像処理プログラム
14日前
株式会社デンソーテン
制御装置、プログラムおよび制御システム
14日前
株式会社デンソーテン
車載装置、情報処理方法およびプログラム
27日前
株式会社デンソーテン
検出装置、検出方法および検出プログラム
1か月前
株式会社デンソーテン
通信装置、通信方法、および、通信システム
19日前
株式会社デンソーテン
高温検査方法、検査システム、及び電子機器
6日前
株式会社デンソーテン
車両制御装置、車両制御方法およびプログラム
21日前
株式会社デンソーテン
制御装置、電源制御装置および電源制御システム
13日前
株式会社デンソーテン
電源制御装置、電源制御システムおよび電源制御方法
12日前
株式会社デンソーテン
画像処理装置、画像処理方法及び画像処理プログラム
19日前
株式会社デンソーテン
運転評価システム、車載装置、情報処理装置及び運転評価方法
25日前
株式会社デンソーテン
電源制御装置
4日前
株式会社デンソーテン
画像認識装置、車載システム、画角調整方法及び画角調整プログラム
6日前
株式会社デンソーテン
死角判定装置、方法及びプログラム、並びに、行動評価装置及びシステム
26日前
株式会社デンソーテン
解析装置、解析方法、解析プログラム、解析システム、及び学習データ生成方法
3日前
株式会社デンソーテン
臨場感向上装置、臨場感向上方法、臨場感向上プログラム及び臨場感向上システム
6日前
株式会社デンソーテン
改ざん検知方法、ハッシュ値算出方法、車載装置、ハッシュ値算出プログラム、及びハッシュ値保存システム
今日
株式会社デンソーテン
運転支援システム、画像認識装置、画像認識プログラム、更新情報提供方法、更新情報提供プログラム、更新データ提供方法及び車両
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ