TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025113926
公報種別
公開特許公報(A)
公開日
2025-08-04
出願番号
2024008344
出願日
2024-01-23
発明の名称
結束装置
出願人
マックス株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
E04G
21/12 20060101AFI20250728BHJP(建築物)
要約
【課題】障害物との衝突から保護することが可能な結束装置を提供する。
【解決手段】結束装置は、鉄筋結束ユニットと、鉄筋結束ユニットを支持する本体ユニットと、複数の鉄筋上を、第1方向に、本体ユニットを移動可能に構成される移動ユニットと、第1方向及び第2方向に直交する方向である第3方向から見た上面視において、少なくとも一部が、移動ユニット及び本体ユニットの第1方向の前方に設けられる前端部と、第1方向及び第2方向に平行な平面に平行で、且つ、第1方向に直交する方向である第4方向において、移動ユニット及び本体ユニットの直交する第4方向の一端より外側に設けられる一端部と、直交する第4方向において、移動ユニット及び本体ユニットの直交する第4方向の他端より外側に設けられる他端部と、を有する前方アームと、を備える。
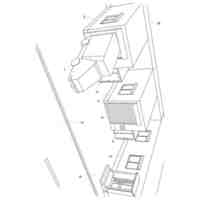
【選択図】図1
特許請求の範囲
【請求項1】
延伸方向が第1方向である複数の第1鉄筋と、延伸方向が前記第1方向に交差する方向である第2方向であり前記第1鉄筋と交差するように配置される複数の第2鉄筋と、を含む複数の鉄筋の前記第1鉄筋と前記第2鉄筋との交差箇所を結束するように構成される鉄筋結束ユニットと、
前記鉄筋結束ユニットを支持する本体ユニットと、
前記複数の鉄筋上を、前記第1方向に、前記本体ユニットを移動可能に構成される移動ユニットと、
前記第1方向及び前記第2方向に直交する方向である第3方向から見た上面視において、少なくとも一部が、前記移動ユニット及び前記本体ユニットの前記第1方向の前方に設けられる前端部と、
前記第1方向及び前記第2方向に平行な平面に平行で、且つ、前記第1方向に直交する方向である第4方向において、前記移動ユニット及び前記本体ユニットの前記第4方向の一端より外側に設けられる一端部と、
前記第4方向において、前記移動ユニット及び前記本体ユニットの前記第4方向の他端より外側に設けられる他端部と、を有する前方アームと、
を備える、結束装置。
続きを表示(約 1,300 文字)
【請求項2】
前記前方アームは、一又は複数の長尺状に形成された水平部を有し、
前記水平部は、前記第4方向に延伸し、前記一端部と、前記他端部とに接続される、請求項1に記載の結束装置。
【請求項3】
前記前方アームは、前記本体ユニットに接続されており、前記第1方向の前記前方に突出する形状を有する突出部を含み、
前記前端部は、前記突出部に設けられている、請求項1に記載の結束装置。
【請求項4】
前記前方アームの前記一端部は、前記移動ユニットの前記第1方向における前端と、前記本体ユニットの前記第1方向における前端との間に設けられ、
前記前方アームの前記他端部は、前記移動ユニットの前記第1方向における前端と、前記本体ユニットの前記第1方向における前端との間に設けられる、請求項1に記載の結束装置。
【請求項5】
前記第3方向から見た上面視において、前記移動ユニット及び前記本体ユニットの前記第1方向の後方に設けられる後方アームを備える、請求項1に記載の結束装置。
【請求項6】
前記前方アームの前記一端部は、前記第1方向において、前記移動ユニット及び前記本体ユニットの前方に設けられ、
前記前方アームの前記他端部は、前記第1方向において、前記移動ユニット及び前記本体ユニットの前方に設けられ、
前記前端部は、前記水平部に設けられている、請求項2に記載の結束装置。
【請求項7】
前記前方アーム及び前記後方アームは、把持されることにより前記結束装置が運搬可能となるように構成される、請求項5に記載の結束装置。
【請求項8】
前記移動ユニットより前記第1方向の前方に位置する前記鉄筋を含む領域を検出範囲とするセンサを有する検出ユニットを備え、
前記前方アームは、前記検出ユニットの前記センサの前記検出範囲外の位置に設けられる、請求項1に記載の結束装置。
【請求項9】
前記第2方向は前記第1方向に直交する方向であり、
前記第4方向は前記第2方向に平行な方向である、請求項1に記載の結束装置。
【請求項10】
延伸方向が第1方向である複数の第1鉄筋と、延伸方向が前記第1方向に交差する方向である第2方向であり前記第1鉄筋と交差するように配置される複数の第2鉄筋と、を含む複数の鉄筋の前記第1鉄筋と前記第2鉄筋との交差箇所を結束するように構成される鉄筋結束ユニットと、
前記鉄筋結束ユニットを支持する本体ユニットと、
前記複数の鉄筋上を、前記第1方向に、前記本体ユニットを移動可能に構成される移動ユニットと、
前記第1方向及び前記第2方向に直交する第3方向から見た上面視において、少なくとも一部が、前記移動ユニット及び前記本体ユニットの前記第1方向の前方に設けられる前端部を有する前方アームと、
を備え、
前記前方アームは、前記複数の鉄筋に接近する前記第3方向の下方に移動して前記複数の鉄筋に当接することにより、前記移動ユニットを、前記複数の鉄筋上から前記第3方向の上方に移動するように構成される、
結束装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本実施形態は、結束装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
従来より、例えば、縦方向に延伸する鉄筋と、横方向に延伸する鉄筋とが交差する交差部をワイヤ等により結束する鉄筋結束作業を自動化する技術が検討されている。例えば、特許文献1には、鉄筋工事に使用できる自走型の作業用ロボットが開示されている。
【0003】
また、特許文献2には、衝突検知機構が設けられた自走式作業ロボットが開示されている。特許文献2に記載の自走式作業ロボットは、例えば、格子状に敷設された複数の鉄筋上を転動する補助輪により鉄筋上を走行し、鉄筋結束機による鉄筋の交差部の結束等を行うことができる結束装置である。また、特許文献2に記載の自走式作業ロボットにおいては、接触センサーとして機能する衝突検知機構が補助輪本体に取り付けられている。
【先行技術文献】
【特許文献】
【0004】
特開2019―039174号公報
特開2020―128680号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に開示された技術により、自走式作業ロボット本体は、衝突検知機構により障害物を検知することができるので、障害物との衝突の発生を抑制することが可能となる。より具体的には、特許文献2に記載の自走式作業ロボットにおいては、衝突検知機構が進行方向前方の補助輪の前方と、進行方向後方の補助輪の後方とにそれぞれ設けられているので、進行方向前方の補助輪の前方の周辺及び進行方向後方の補助輪の後方の周辺に存在する障害物を検知することができる。しかしながら、例えば、自走式作業ロボットの進行方向前方において、補助輪の周辺以外の領域に障害物が存在する場合等において、障害物との衝突が発生する可能性がある。従って、自走式作業ロボットを衝突から保護する機構には改善の余地があると考えられる。
【0006】
本開示は、上記課題に鑑みてなされたものであり、障害物との衝突から保護することが可能な結束装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様は、延伸方向が第1方向である複数の第1鉄筋と、延伸方向が第1方向に交差する方向である第2方向であり第1鉄筋と交差するように配置される複数の第2鉄筋と、を含む複数の鉄筋の第1鉄筋と第2鉄筋との交差箇所を結束するように構成される鉄筋結束ユニットと、鉄筋結束ユニットを支持する本体ユニットと、複数の鉄筋上を、第1方向に、本体ユニットを移動可能に構成される移動ユニットと、第1方向及び第2方向に直交する方向である第3方向から見た上面視において、少なくとも一部が、移動ユニット及び本体ユニットの第1方向の前方に設けられる前端部と、第1方向及び第2方向に平行な平面に平行で、且つ、第1方向に直交する方向である第4方向において、移動ユニット及び本体ユニットの直交する第4方向の一端より外側に設けられる一端部と、直交する第4方向において、移動ユニット及び本体ユニットの直交する第4方向の他端より外側に設けられる他端部と、を有する前方アームと、を備える結束装置を提供する。
【0008】
本開示の他の一態様は、延伸方向が第1方向である複数の第1鉄筋と、延伸方向が第1方向に交差する方向である第2方向であり第1鉄筋と交差するように配置される複数の第2鉄筋と、を含む複数の鉄筋の第1鉄筋と第2鉄筋との交差箇所を結束するように構成される鉄筋結束ユニットと、鉄筋結束ユニットを支持する本体ユニットと、複数の鉄筋上を、第1方向に、本体ユニットを移動可能に構成される移動ユニットと、第1方向及び第2方向に直交する第3方向から見た上面視において、少なくとも一部が、移動ユニット及び本体ユニットの第1方向の前方に設けられる前端部を有する前方アームと、を備え、前方アームは、移動ユニットが第3方向の上方に移動することにより、移動ユニットを、複数の鉄筋上から第3方向の上方に移動可能するように構成される結束装置を提供する。
【発明の効果】
【0009】
本開示によれば、障害物との衝突から保護することが可能な結束装置が提供される。
【図面の簡単な説明】
【0010】
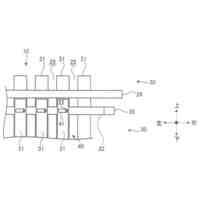
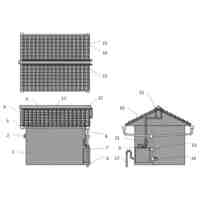
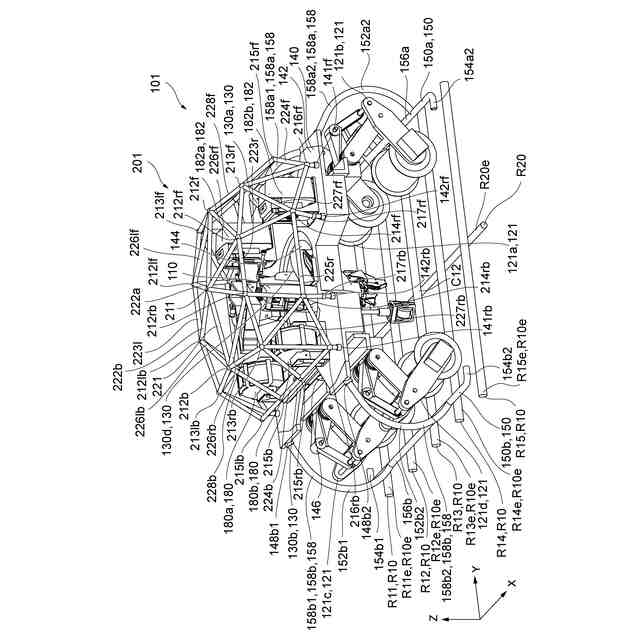
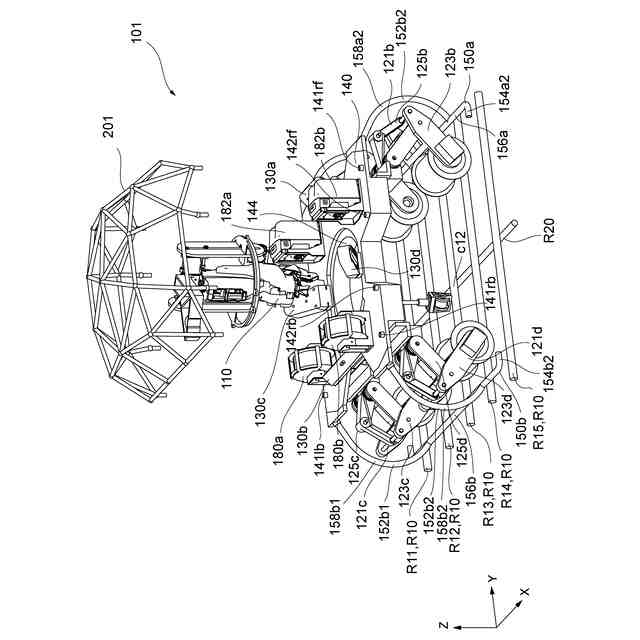
図1は、本開示の実施形態に係る鉄筋結束ロボット101を斜め上方向から見た全体斜視図である。
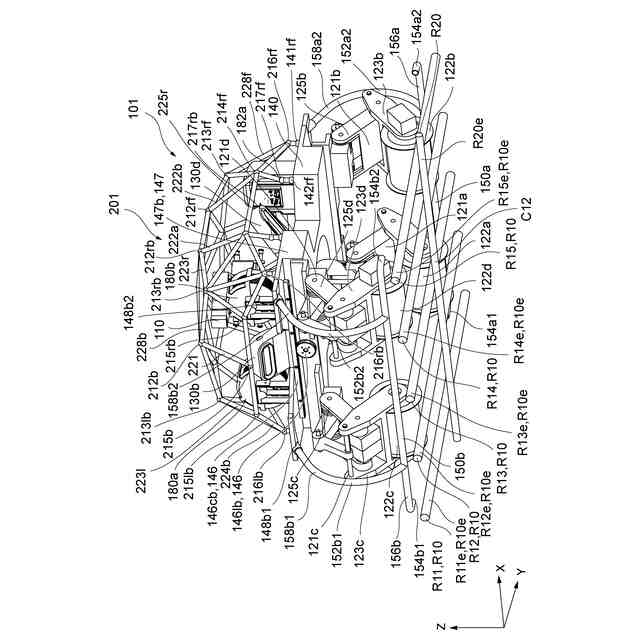
図2は、本開示の実施形態に係る鉄筋結束ロボット101を斜め下方向から見た全体斜視図である。
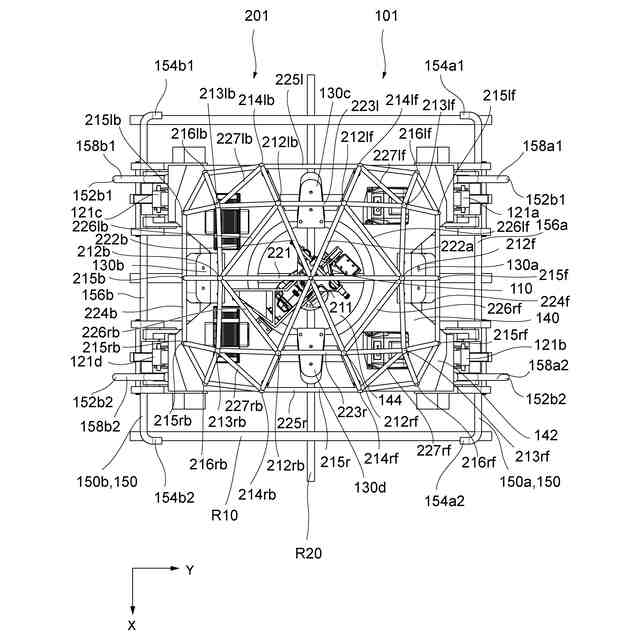
図3は、鉄筋結束ロボット101を上方向(Z方向における上方)から見た平面図である。
図4は、鉄筋結束ロボット101を下方向(Z方向における下方)から見た平面図である。
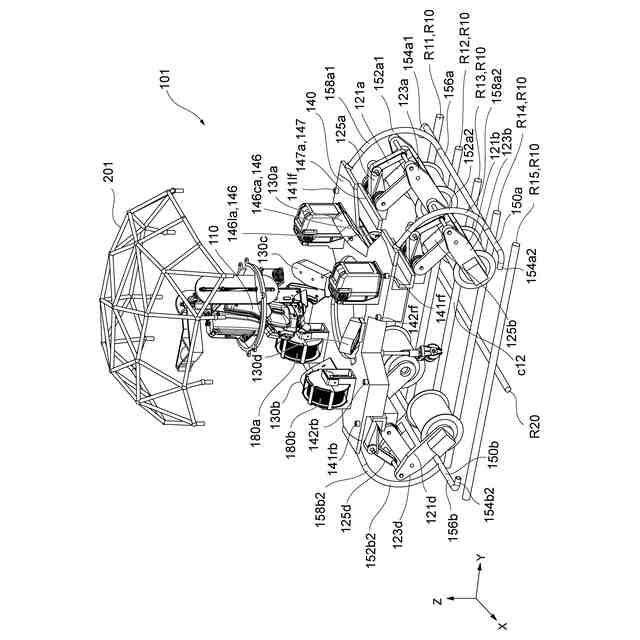
図5は、鉄筋結束ロボット101の鉄筋結束ユニット110を外した状態を斜め上方向から見た斜視図である。
図6は、鉄筋結束ロボット101の鉄筋結束ユニット110を外した状態を斜め上方向から見た斜視図である。
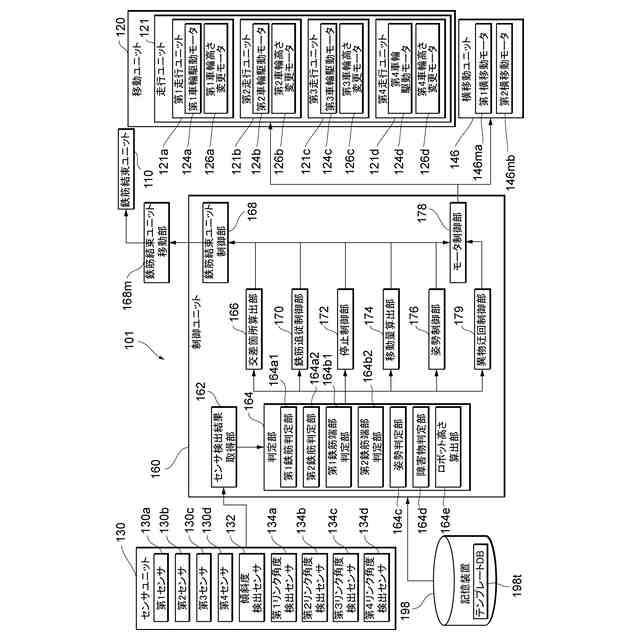
図7は、鉄筋結束ロボット101の機能ブロック構成を説明する図である。
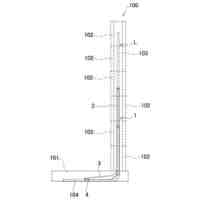
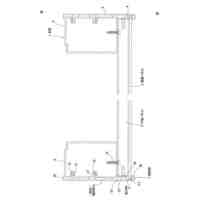
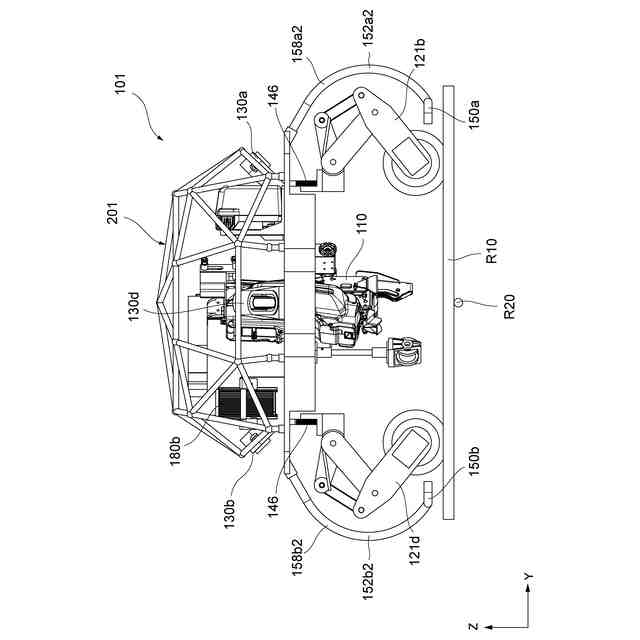
図8は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット101をY方向から見た図である。
図9は、第1鉄筋R10に沿って走行中の鉄筋結束ロボット101をX方向から見た図である。
図10は、走行を停止し結束作業を実行する鉄筋結束ロボット101をY方向から見た図である。
図11は、結束作業を実行する鉄筋結束ロボット101をX方向から見た図である。
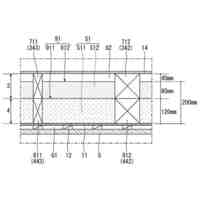
図12は、鉄筋結束ロボット101を水平方向(X方向)から見た模式的な側面図である。
図13は、鉄筋結束ロボット101を上方向(Z方向上側)から見た模式的な上面図である。
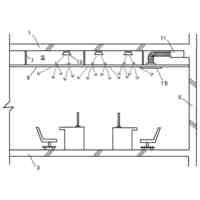
図14は、第1センサ130aによる撮像画像を模式的に示す図である。
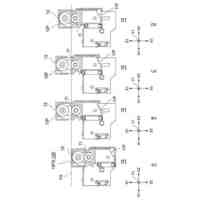
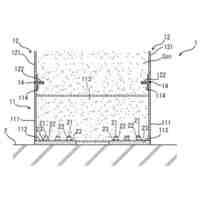
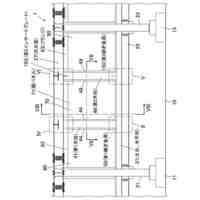
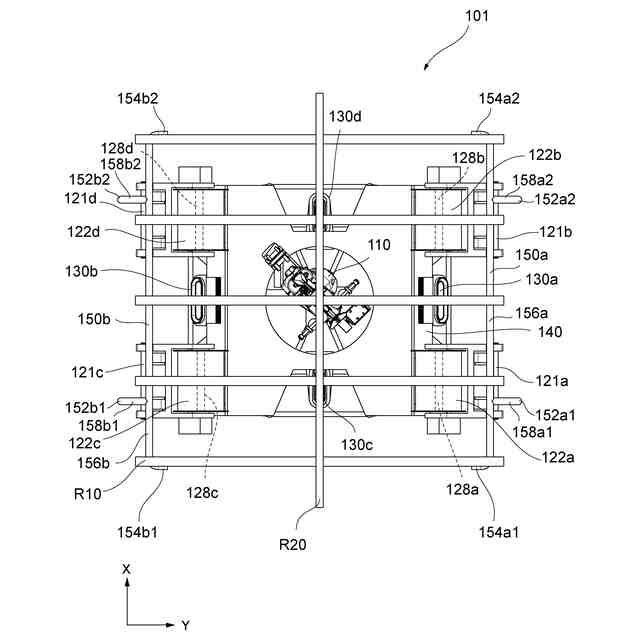
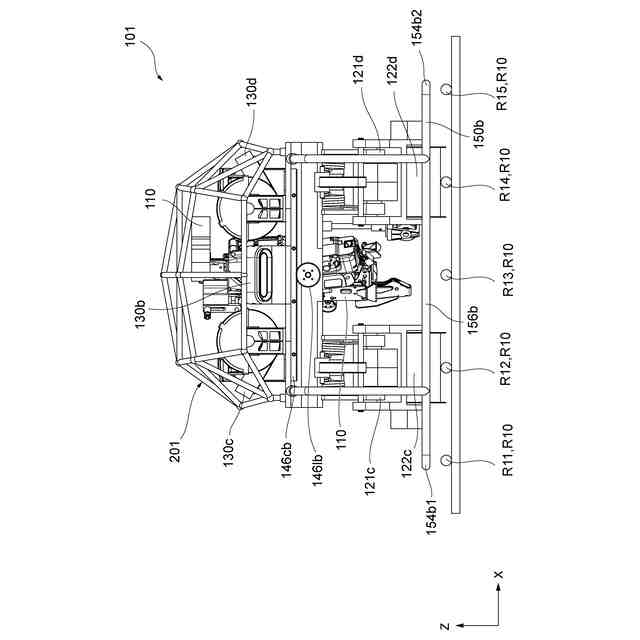
図15は、横移動中の鉄筋結束ロボット101を背面から見た図である。
図16は、横移動中の鉄筋結束ロボット101を背面から見た図である。鉄筋結束ロボット101
図17は、横移動中の鉄筋結束ロボット101を背面から見た図である。
図18は、横移動中の鉄筋結束ロボット101を背面から見た図である。
図19は、横移動中の鉄筋結束ロボット101を背面から見た図である。
図20は、本開示の他の実施形態に係る鉄筋結束ロボット101AをZ方向下方から見た模式的な図である。
図21Aは、本開示の実施形態に係る鉄筋結束ロボット102の斜め上方向から見た全体斜視図である。
図21Bは、本開示の実施形態に係る鉄筋結束ロボット102を上方向(Z方向における上方)から見た平面図である。
図22は、本開示の実施形態に係る鉄筋結束ロボット102の斜め上方向から見た他の全体斜視図である。
図23は、本開示の実施形態に係る鉄筋結束ロボット102の斜め上方向から見た更に他の全体斜視図である。
図24は、本開示の実施形態に係る鉄筋結束ロボット102の斜め上方向から見た更に他の全体斜視図である。
図25は、本開示の実施形態に係る鉄筋結束ロボット103の斜視図である。
図26は、本開示の実施形態に係る鉄筋結束ロボット104の斜視図である。
図27は、横移動中の鉄筋結束ロボット104を背面から見た図である。
図28は、横移動中の鉄筋結束ロボット104を背面から見た図である。
図29は、横移動中の鉄筋結束ロボット104を背面から見た図である。
図30は、横移動中の鉄筋結束ロボット104を背面から見た図である。
図31は、横移動中の鉄筋結束ロボット104を背面から見た図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
マックス株式会社
プリンタ
1日前
個人
野良猫ハウス
8日前
個人
転落防止用手摺
2日前
個人
フェンス
24日前
個人
キャチクランプ
3か月前
個人
居住車両用駐車場
10日前
積水樹脂株式会社
柵体
1日前
ニチハ株式会社
建築板
16日前
個人
地下型マンション
2か月前
個人
鋼管結合資材
2か月前
個人
壁断熱パネル
3か月前
個人
熱抵抗多層断熱建材
9日前
株式会社タナクロ
テント
2か月前
個人
柵
1か月前
個人
補強部材
9日前
鹿島建設株式会社
壁体
15日前
成友建設株式会社
建物
8日前
個人
循環流水式屋根融雪装置
2か月前
イワブチ株式会社
組立柱
1日前
三協立山株式会社
構造体
3か月前
三協立山株式会社
構造体
2か月前
インターマン株式会社
天井構造
29日前
三協立山株式会社
簡易建物
17日前
ミサワホーム株式会社
躯体
3か月前
個人
ペグ
3か月前
株式会社山水
溝形鋼
1か月前
株式会社NejiLaw
継手構造
8日前
日鉄建材株式会社
屋根構造
13日前
三協立山株式会社
簡易建物
17日前
三協立山株式会社
簡易建物
17日前
鹿島建設株式会社
解体方法
2か月前
鹿島建設株式会社
接合構造
1か月前
株式会社大林組
建物
2か月前
株式会社永徳
建築用下地材
3か月前
株式会社NejiLaw
継手構造
8日前
岡部株式会社
型枠緊結金具
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ