TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106136
公報種別
公開特許公報(A)
公開日
2025-07-11
出願番号
2025076245,2024558401
出願日
2025-05-01,2024-04-10
発明の名称
位置検出方法、集積回路、及びセンサ装置
出願人
株式会社ワコム
代理人
弁理士法人そらおと
主分類
G06F
3/041 20060101AFI20250704BHJP(計算;計数)
要約
【課題】位置検出の頻度を低下させることなく、かつ、センサコントローラの回路規模を増大させることなく、センサコントローラにおいて受信されるペン信号のS/N比を向上させる。
【解決手段】本発明による位置検出方法は、第1の所定本数の線状電極を選択するステップと、第1の所定本数の線状電極のうちの第1の所定本数より少ない第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給することにより第1の結果を得るステップと、上記第2の所定本数の線状電極とは一致しない第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給することにより第2の結果を得るステップと、を含む。
【選択図】図24
特許請求の範囲
【請求項1】
互いに平行に延設された複数の線状電極の中から互いに隣接する第1の所定本数の線状電極を選択するステップと、
前記選択するステップを実行した後の第1の期間において、前記第1の所定本数の線状電極のうちの前記第1の所定本数より少ない第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第1の結果を得るステップと、
前記選択するステップを実行した後の前記第1の期間とは異なる第2の期間において、前記第1の所定本数の線状電極のうちの前記第2の所定本数の線状電極であって前記第1の期間における前記第2の所定本数の線状電極とは一致しない前記第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第2の結果を得るステップと、
前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出するステップと、
を含む位置検出方法。
続きを表示(約 2,400 文字)
【請求項2】
前記第1の交流電流及び前記第2の交流電流は、それぞれの時間微分が互いに逆相になるという関係を満たすように生成される、
請求項1に記載の位置検出方法。
【請求項3】
前記選択するステップを実行した後の前記第1の期間及び前記第2の期間のいずれとも異なる第3の期間において、前記第1の所定本数の線状電極のうちの前記第2の所定本数の線状電極であって前記第1における前記第2の所定本数の線状電極及び前記第2の期間における前記第2の所定本数の線状電極のいずれとも一致しない前記第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第3の結果を得るステップ、をさらに含み、
前記指示体の位置を導出するステップは、前記第1の結果、前記第2の結果、及び前記第3の結果に基づいて、前記指示体の位置を導出する、
請求項1又は2に記載の位置検出方法。
【請求項4】
前記指示体の位置を導出するステップは、前記第1の結果、前記第2の結果、及び前記第3の結果を示すベクトルに対し、前記第1乃至前記第3の期間における前記第1の所定本数の線状電極への前記第1及び前記の交流電流の供給方法を示す行列を乗算するステップを含む、
請求項3に記載の位置検出方法。
【請求項5】
前記第1の所定本数は6本であり、
前記第2の所定本数は3本である、
請求項4に記載の位置検出方法。
【請求項6】
複数の前記検出コイルのそれぞれについて、前記第1の結果を得るステップ、前記第2の結果を得るステップ、及び、前記第3の結果を得るステップを実行し、
前記指示体の位置を導出するステップは、前記複数の前記検出コイルのそれぞれについて得られた前記第1の結果、前記第2の結果、及び前記第3の結果に基づいて、前記指示体の位置を導出する、
請求項3に記載の位置検出方法。
【請求項7】
互いに平行に延設された複数の線状電極及び検出コイルに接続され、指示体の位置を導出する集積回路であって、
前記複数の線状電極の中から互いに隣接する第1の所定本数の線状電極を選択し、
前記第1の所定本数の線状電極を選択した後の第1の期間において、前記第1の所定本数の線状電極のうちの前記第1の所定本数より少ない第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第1の結果を取得し、
前記第1の所定本数の線状電極を選択した後の前記第1の期間とは異なる第2の期間において、前記第1の所定本数の線状電極のうちの前記第2の所定本数の線状電極であって前記第1の期間における前記第2の所定本数の線状電極とは一致しない前記第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第2の結果を取得し、
前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出する、
集積回路。
【請求項8】
指示体の位置を導出するセンサ装置であって、
互いに平行に延設された複数の線状電極と、
検出コイルと、
前記複数の線状電極及び前記検出コイルに接続された集積回路と、を備え、
前記集積回路は、
前記複数の線状電極の中から互いに隣接する第1の所定本数の線状電極を選択し、
前記第1の所定本数の線状電極を選択した後の第1の期間において、前記第1の所定本数の線状電極のうちの前記第1の所定本数より少ない第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第1の結果を取得し、
前記第1の所定本数の線状電極を選択した後の前記第1の期間とは異なる第2の期間において、前記第1の所定本数の線状電極のうちの前記第2の所定本数の線状電極であって前記第1の期間における前記第2の所定本数の線状電極とは一致しない前記第2の所定本数の線状電極に対して一端側から第1の交流電流を供給するとともに、前記第1の所定本数の線状電極のうちの残りの線状電極に対して一端側から第2の交流電流を供給し、該第1の交流電流及び該第2の交流電流の供給の結果として前記第1の所定本数の線状電極において生ずる交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第2の結果を取得し、
前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出する、
センサ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置検出方法、集積回路、及びセンサ装置に関する。
続きを表示(約 5,400 文字)
【背景技術】
【0002】
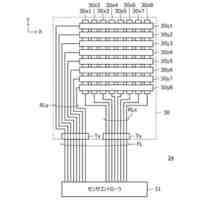
タブレット端末などのパネル面内における電磁誘導ペンの位置を検出するための方式の1つとして、電磁誘導方式(EMR方式)が知られている。EMR方式によるタブレット端末は、パネル面内に配置されたペン検出用のセンサ(以下「EMRセンサ」という)と、EMRセンサに接続されたセンサコントローラとを有している。EMRセンサは、y方向に並べて配置された複数のTxコイルと、x方向に並べて配置された複数のRxコイルとを含んで構成される。センサコントローラは、複数のTxコイルから順次交番磁界を送出し、その都度、各Rxコイルにて電磁誘導ペンが送信した反射信号(以下「ペン信号」という)を受信することにより、電磁誘導ペンの位置を検出するとともに、電磁誘導ペンが送信したデータを受信する。特許文献1には、EMRセンサの一例が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第6698386号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、センサコントローラにおいて受信されるペン信号のS/N比は、できるだけ大きいことが好ましい。S/N比を向上させるための方法はいくつか考えられるが、そのうちの1つに、ペン信号の送信期間が長くなるように電磁誘導ペンを構成するという方法がある。センサコントローラにおけるペン信号の検出期間がN倍になると、受信されるペン信号のレベルがN倍になる一方、受信されるノイズのレベルはN
1/2
倍に留まるからである。しかしながら一方で、ペン信号の送信期間を単純に長くしたとすると、位置検出の頻度の低下という別の問題が発生する。これに対し、センサコントローラにおいて複数のRxコイルで並行してペン信号を受信することとすれば、位置検出の頻度を低下させることなくペン信号の送信期間を長くすることも可能であるが、そうすると今度は、並行受信分の数の受信回路が必要になり、センサコントローラの回路規模が増大してしまうことになる。
【0005】
したがって、本発明の目的の一つは、位置検出の頻度を低下させることなく、かつ、センサコントローラの回路規模を増大させることなく、センサコントローラにおいて受信されるペン信号のS/N比を向上させることのできる位置検出方法、集積回路、及びセンサ装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明による位置検出方法は、第1の期間において、並設された複数の送出コイル導体のそれぞれを第1の接続形態で駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて指示体が生成する交番磁界を検出コイルを用いて検出することにより第1の結果を得るステップと、前記第1の期間とは異なる第2の期間において、前記複数の送出コイル導体のそれぞれを前記第1の接続形態とは異なる第2の接続形態で前記駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて前記指示体が生成する交番磁界を検出コイルを用いて検出することにより第2の結果を得るステップと、前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出するステップと、を含む位置検出方法である。
【0007】
本発明による集積回路は、並設された複数の送出コイル導体、駆動回路、及び検出コイルに接続され、指示体の位置を導出する集積回路であって、第1の期間において、前記複数の送出コイル導体のそれぞれを第1の接続形態で前記駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて指示体が生成する交番磁界を前記検出コイルを用いて検出することにより第1の結果を取得し、前記第1の期間とは異なる第2の期間において、前記複数の送出コイル導体のそれぞれを前記第1の接続形態とは異なる第2の接続形態で前記駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて前記指示体が生成する交番磁界を前記検出コイルを用いて検出することにより第2の結果を取得し、前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出する、集積回路である。
【0008】
本発明によるセンサ装置は、指示体の位置を導出するセンサ装置であって、並設された複数の送出コイル導体と、駆動回路と、検出コイルと、並設された複数の送出コイル導体、駆動回路、及び検出コイルに接続された集積回路と、を備え、前記集積回路は、第1の期間において、前記複数の送出コイル導体のそれぞれを第1の接続形態で前記駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて指示体が生成する交番磁界を前記検出コイルを用いて検出することにより第1の結果を取得し、前記第1の期間とは異なる第2の期間において、前記複数の送出コイル導体のそれぞれを前記第1の接続形態とは異なる第2の接続形態で前記駆動回路に接続し、該駆動回路から供給される交流電流により前記複数の送出コイル導体から同時に送出される交番磁界に応じて前記指示体が生成する交番磁界を前記検出コイルを用いて検出することにより第2の結果を取得し、前記第1の結果及び前記第2の結果に基づいて、前記指示体の位置を導出する、センサ装置である。
【発明の効果】
【0009】
本発明によれば、第1の期間及び第2の期間のそれぞれにおいて複数の送出コイル導体から同時に交番磁界を送出し、かつ、検出コイルにより検出された信号を送出コイル導体ごとに分離することができるので、位置検出の頻度を低下させることなく、かつ、センサコントローラの回路規模を増大させることなく、センサコントローラにおいて受信されるペン信号のS/N比を向上させることが可能になる。
【図面の簡単な説明】
【0010】
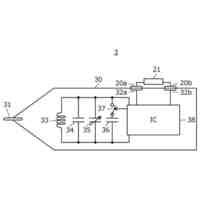
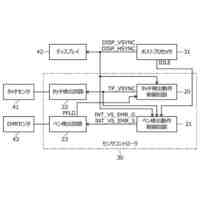
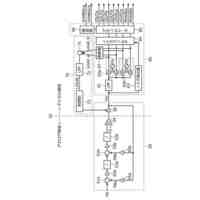
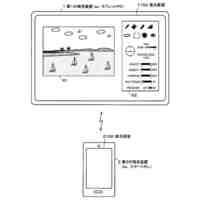
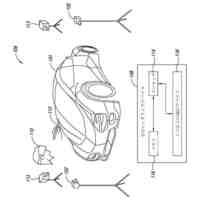
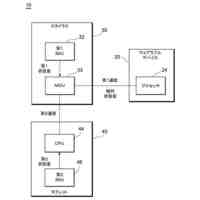
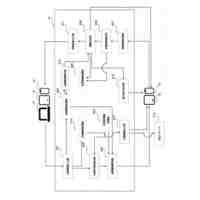
本発明の第1の実施の形態による位置検出システム1の構成を示す図である。
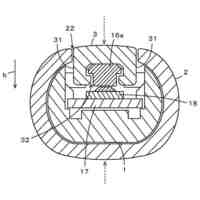
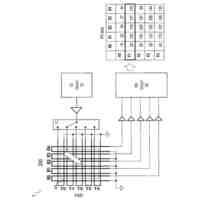
図1に示したスイッチ部30の内部構成を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
オペアンプ30eからセンサコントローラ31に供給される受信信号Rxを説明する図である。
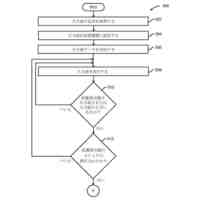
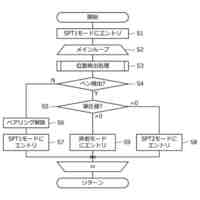
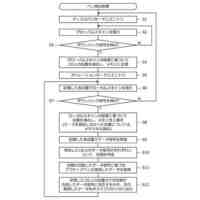
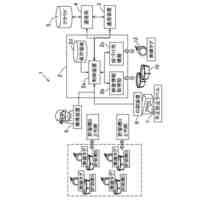
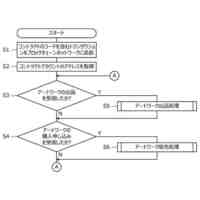
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
本発明の第1の実施の形態の第1の比較例による受信信号Rxを説明する図である。
本発明の第1の実施の形態の第2の比較例による受信信号Rxを説明する図である。
電磁誘導ペンPがループコイルLCy
m
上に位置している場合に、その近傍の各ループコイルLCy
m
から送出された交番磁界に応じて受信されるペン信号のレベル(分離取得する場合には分離後のレベル)をシミュレーションした結果を示す図である。
本発明の第2の実施の形態による位置検出システム1の構成を示す図である。
図13に示したスイッチ部30の内部構成を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
本発明の第3の実施の形態による位置検出システム1の構成を示す図である。
図18に示したスイッチ部30の内部構成を示す図である。
センサコントローラ31が指Fの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
センサコントローラ31が電磁誘導ペンPの位置検出を行う場合におけるスイッチ部30の状態を示す図である。
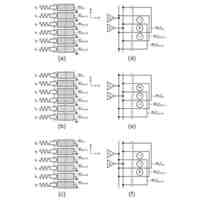
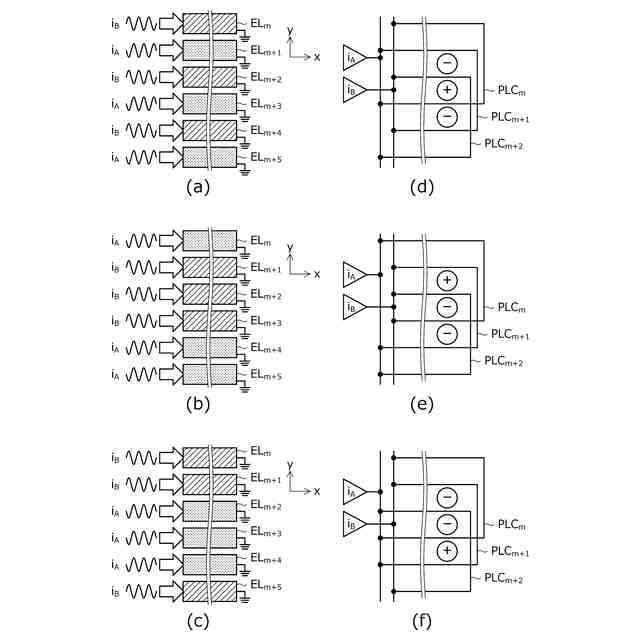
(a)~(c)は、図21~図23のそれぞれにおける交流電流の供給方法を模式的に示す図であり、(d)~(f)は、それぞれ(a)~(c)に示した方法で6本の線状電極EL
m
~EL
m+5
に交流電流i
A
,i
B
を供給した場合の等価回路を示す図である。
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
センサコントローラ31が実行する電磁誘導ペンPの位置検出の全体の流れを示すフロー図である。
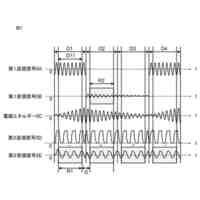
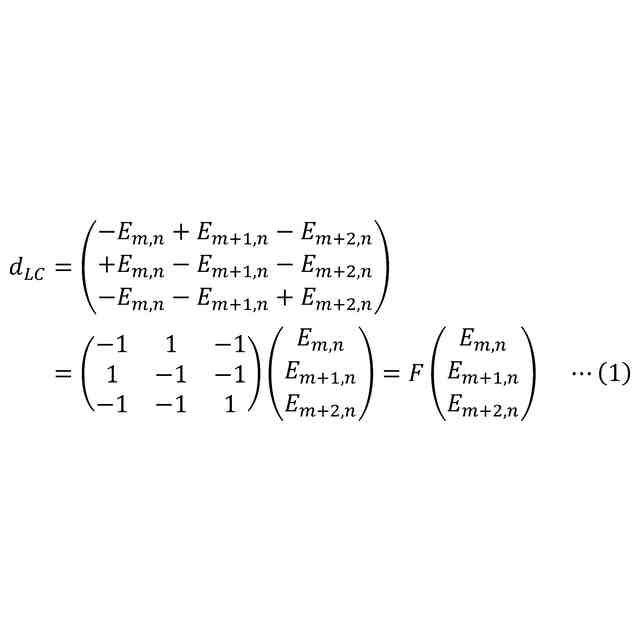
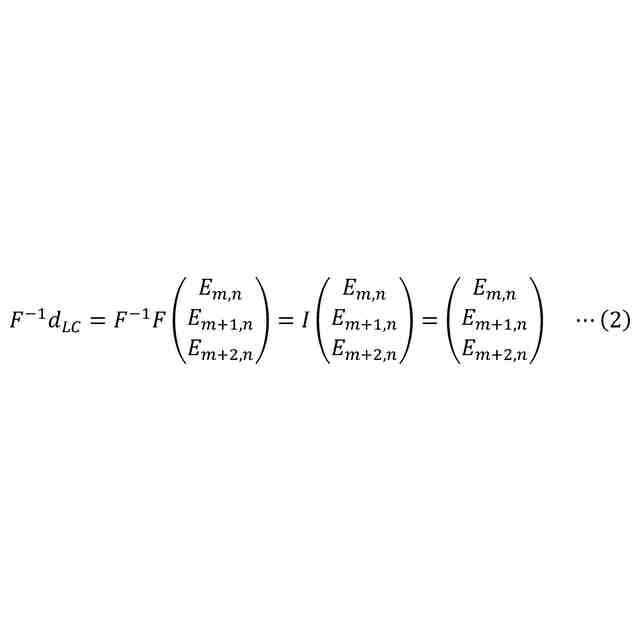
(a)~(c)はそれぞれ、図24(a)~(c)の接続形態において、電磁誘導ペンPが擬似ループコイルPLC
m+1
の上方に位置している場合にセンサコントローラ31に入力される受信信号Rx_EMR(-E
m,n
+E
m+1,n
-E
m+2,n
、E
m,n
-E
m+1,n
-E
m+2,n
、-E
m,n
-E
m+1,n
+E
m+2,n
)を示す図であり、(d)~(f)はそれぞれ、(a)~(c)に示す受信信号Rx_EMRが取得された場合に得られるペン信号のレベルE
m,n
,E
m+1,n
,E
m+2,n
を示す図である。
電磁誘導ペンPの傾きを示す角度θ,φについて説明する図である。
(θ,φ)=(0,0)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,0)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,90)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,180)の場合に取得されるペン信号のレベルを示す図である。
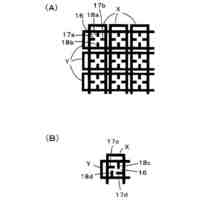
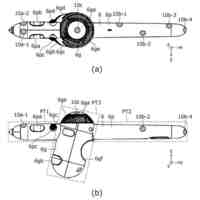
(a)は、本発明の第3の実施の形態による位置検出システム1における線状電極ELの選択方法を説明する図であり、(b)は、本発明の第4の実施の形態による位置検出システム1における線状電極ELの選択方法を説明する図である。
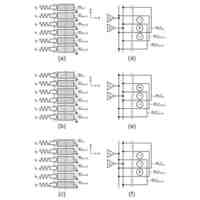
(a)(b)(c)はそれぞれ、CDM1、CDM3、CDM7における線状電極ELの選択方法を示す図であり、(d)(e)(f)はそれぞれ、CDM1、CDM3、CDM7により得られるペン信号のレベル(復元演算を行う場合は復元演算後のレベル)を示す図である。
(a)(b)は、CDM1、CDM3、CDM7のそれぞれを用いる場合に取得されるペン信号のレベルを示す図であり、(c)は、CDM1、CDM3、CDM7のそれぞれにおけるペン信号のレベルのピーク値について、測定値と理論値をプロットしてなる図である。
(θ,φ)=(0,0)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,0)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,90)の場合に取得されるペン信号のレベルを示す図である。
(θ,φ)=(60,180)の場合に取得されるペン信号のレベルを示す図である。
(a)(b)(c)は、互いに異なる方法で擬似ループコイルPLCから交番磁界を送出する場合を示す図であり、(d)(e)(f)は、それぞれ(a)(b)(c)に示す方法により擬似ループコイルPLCから交番磁界を送出する場合に得られるペン信号のレベルを示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ワコム
電子消去具
2か月前
株式会社ワコム
カートリッジ及び電子ペン
1か月前
株式会社ワコム
自動採点装置、プログラム、及びシステム
15日前
株式会社ワコム
センサコントローラ、方法、及び位置検出装置
2か月前
株式会社ワコム
センサ、センサコントローラ、及び位置検出装置
1か月前
株式会社ワコム
電子機器
2か月前
株式会社ワコム
電子ペン
1か月前
株式会社ワコム
電子ペン
28日前
株式会社ワコム
電子ペン
1か月前
株式会社ワコム
電子ペン
14日前
株式会社ワコム
電子ペン
14日前
株式会社ワコム
集積回路
8日前
株式会社ワコム
位置指示器
2か月前
株式会社ワコム
位置指示器
2か月前
株式会社ワコム
描画システム
6日前
株式会社ワコム
位置検出装置
14日前
株式会社ワコム
システム及び方法
1か月前
株式会社ワコム
方法及び処理デバイス
8日前
株式会社ワコム
ペン及びセンサコントローラ
3か月前
株式会社ワコム
位置検出方法及び位置検出装置
16日前
株式会社ワコム
位置指示装置、コンピュータ、制御方法
3か月前
株式会社ワコム
コントローラ及びトラッキングシステム
21日前
株式会社ワコム
ウェアラブルデバイス及び入力システム
1か月前
株式会社ワコム
位置検出方法、位置検出器および集積回路
2か月前
株式会社ワコム
指示位置検出装置および指示位置検出方法
2か月前
株式会社ワコム
位置検出方法、集積回路、及びセンサ装置
2か月前
株式会社ワコム
VR画像生成システム及びVR画像生成方法
2か月前
株式会社ワコム
ペン、ペン及びタッチコントローラを含むシステム
今日
株式会社ワコム
センサ装置、集積回路、及び、指示体を検出する方法
2か月前
株式会社ワコム
パームリジェクションの方法及びセンサコントローラ
今日
株式会社ワコム
アートワークの取引方法、コンピュータ、及びプログラム
3か月前
個人
裁判のAI化
2か月前
個人
フラワーコートA
1か月前
個人
情報処理システム
2か月前
個人
工程設計支援装置
1か月前
個人
検査システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ