TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025105266
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023223705
出願日
2023-12-28
発明の名称
作業機械、遠隔操作支援装置、支援システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/20 20060101AFI20250703BHJP(水工;基礎;土砂の移送)
要約
【課題】ユーザによる作業機械の操作を適切に支援することが可能な技術を提供する。
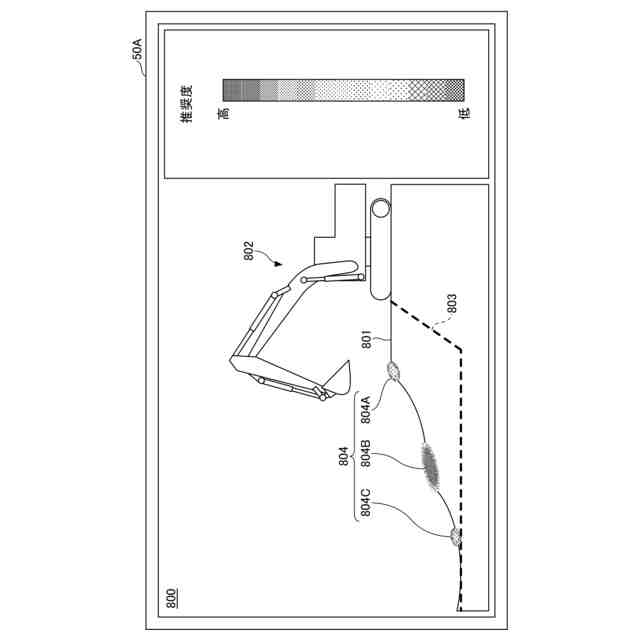
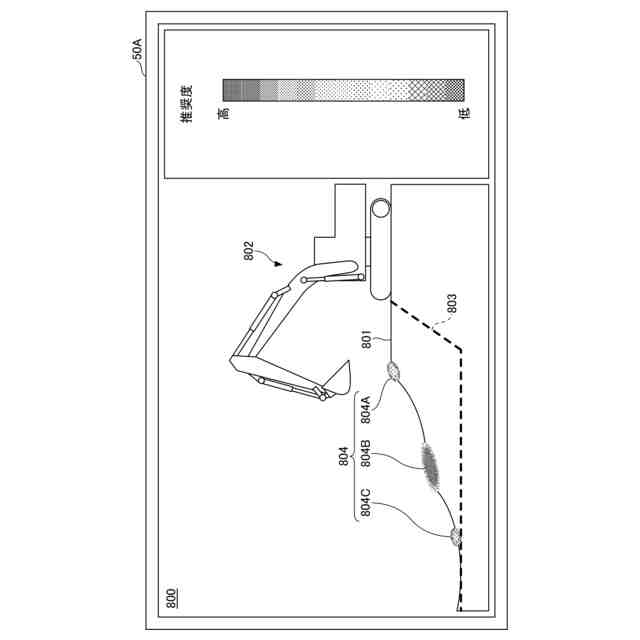
【解決手段】本開示の一実施形態に係るショベル100は、ショベル100の作業領域の物体の形状を変化させるように動作するアタッチメントATと、ショベル100の作業領域の物体の現在の形状を表す情報に基づき、ショベル100の作業領域の中でアタッチメントATが土砂の形状を変化させる作業場所を視覚的に提案する表示装置50Aと、を備える。
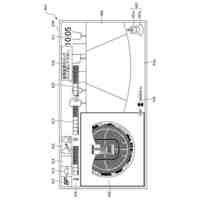
【選択図】図8
特許請求の範囲
【請求項1】
作業機械の作業領域の物体の形状を変化させるように動作する作業装置と、
作業機械の作業領域の物体の現在の形状を表す情報に基づき、作業機械の作業領域の中で前記作業装置が物体の形状を変化させる作業対象の場所を視覚的に提案する表示装置と、を備える、
作業機械。
続きを表示(約 1,000 文字)
【請求項2】
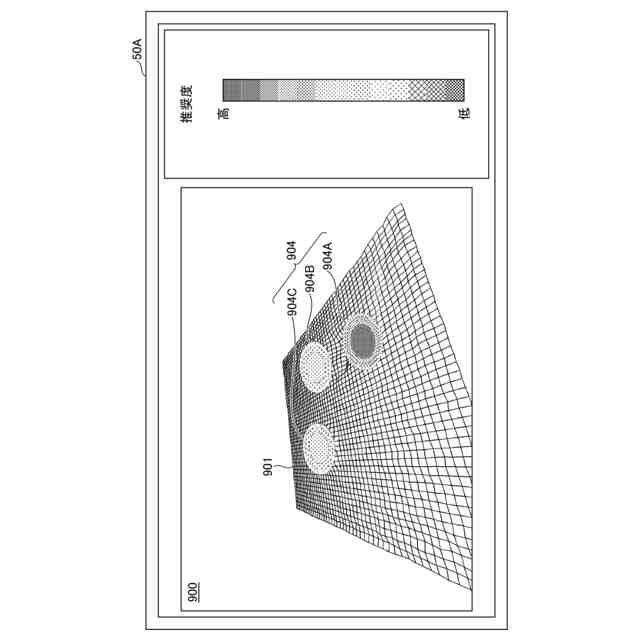
前記表示装置は、作業機械の作業領域において、前記作業対象の場所としての推奨度が相対的に高い場所と、前記推奨度が相対的に低い場所とを区別可能なように表示する、
請求項1に記載の作業機械。
【請求項3】
前記表示装置は、前記推奨度の違いを色の違い又は数値の違いによって表示する、
請求項2に記載の作業機械。
【請求項4】
前記表示装置は、前記推奨度の違いをヒートマップによって表示する、
請求項3に記載の作業機械。
【請求項5】
前記表示装置は、作業機械の作業領域の中で、前記推奨度が極大値を取る場所を表示する、
請求項2乃至4の何れか一項に記載の作業機械。
【請求項6】
前記表示装置は、作業機械の作業領域の中に前記推奨度が所定基準に対して相対的に高い作業場所がない場合、提案する作業場所がない旨を表示する、
請求項2乃至4の何れか一項に記載の作業機械。
【請求項7】
前記推奨度の高低は、作業機械の作業効率又は安全性の高低と関連付けられるように規定される、
請求項2乃至4の何れか一項に記載の作業機械。
【請求項8】
作業機械の作業領域の物体の形状と対応付けられた、所定基準に対して相対的に高い熟練度のオペレータの操作による作業機械の動作に関する教師データによって機械学習がされた学習済みモデルを用いて、作業機械の作業領域の物体の現在の形状を表す情報に基づき、作業機械の作業領域における前記推奨度の分布を出力する処理装置を備える、
請求項7に記載の作業機械。
【請求項9】
前記表示装置は、作業機械の作業領域の物体の現在の形状を表す情報に基づき、時系列の複数の前記作業対象の場所を視覚的に提案する、
請求項1乃至4の何れか一項に記載の作業機械。
【請求項10】
前記表示装置は、作業機械の作業領域の物体の現在の形状を表す情報に基づき、作業機械の作業領域の中での前記作業対象の場所及びその前記作業対象の場所での物体の形状を変化させる際の前記作業装置の作業部位の軌道を視覚的に提案する、
請求項1乃至4の何れか一項に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械等に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、オペレータによる作業機械の操作を支援する機能が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/158539号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のマシンガイダンス機能では、ショベルの掘削作業を行う場合の作業の基準となる目標施工面とアタッチメントの作業部位(例えば、バケット)との距離等が報知されるだけである。そのため、例えば、経験の浅いオペレータは、作業領域のどの場所から掘削作業を開始し、次にどの場所を掘削すればよいのか等の作業対象の場所の決定を適切に行うことができない可能性がある。
【0005】
そこで、上記課題に鑑み、ユーザによる作業機械の操作を適切に支援することが可能な技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本開示の一実施形態では、
作業機械の作業領域の物体の形状を変化させるように動作する作業装置と、
作業機械の作業領域の物体の現在の形状を表す情報に基づき、作業機械の作業領域の中で前記作業装置が物体の形状を変化させる作業対象の場所を視覚的に提案する表示装置と、を備える、
作業機械が提供される。
【0007】
また、本開示の他の実施形態では、
作業領域の物体の形状を変化させるように動作する作業装置を備える作業機械をユーザが遠隔操作するための操作部と、
前記操作部の操作状態を表す情報を前記作業機械に送信する通信部と、
前記作業機械の作業領域の物体の現在の形状を表す情報に基づき、前記作業機械の作業領域の中で前記作業装置が物体の形状を変化させる作業対象の場所を視覚的に提案する表示部と、を備える、
遠隔操作支援装置が提供される。
【0008】
また、本開示の更に他の実施形態では、
作業領域の物体の形状を変化させるように動作する作業装置を備える作業機械のユーザによる操作を支援する支援システムであって、
前記作業機械の作業領域の物体の現在の形状を表す情報に基づき、前記作業機械の作業領域の中で前記作業装置が物体の形状を変化させる作業対象の場所を視覚的にユーザに提案する表示部と、を備える、
支援システムが提供される。
【発明の効果】
【0009】
上述の実施形態によれば、ユーザによる作業機械の操作を適切に支援することができる。
【図面の簡単な説明】
【0010】
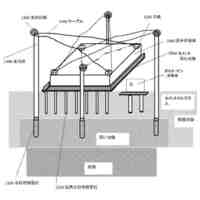
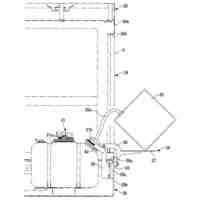
稼働支援システムの一例を示す図である。
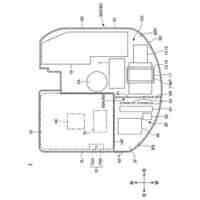
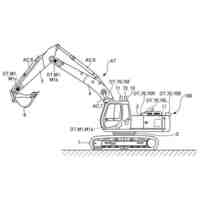
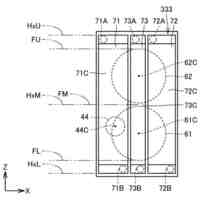
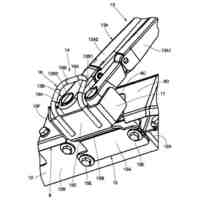
ショベルの一例を示す上面図である。
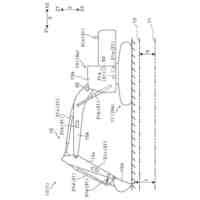
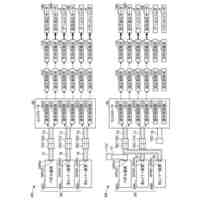
ショベルの遠隔操作に関する構成の一例を示す図である。
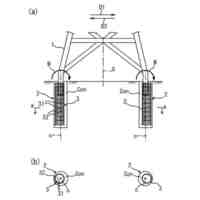
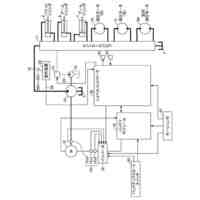
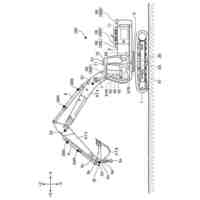
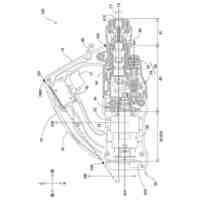
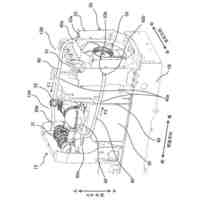
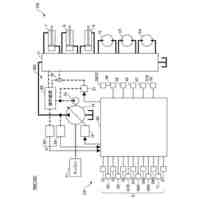
ショベルの構成の一例を示す図である。
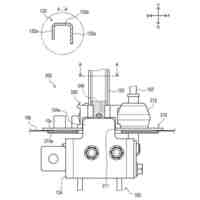
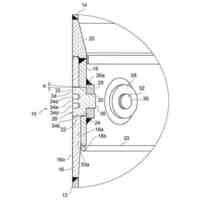
情報処理装置の構成の一例を示す図である。
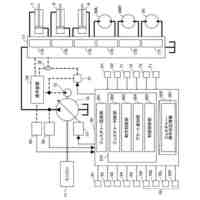
稼働支援システムの機能構成の第1例を示す機能ブロック図である。
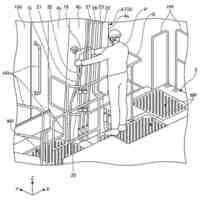
作業領域の一例を示す図である。
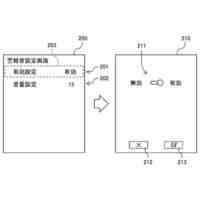
ショベルの作業場所の提案に関する表示方法の第1例を示す図である。
ショベルの作業場所の提案に関する表示方法の第2例を示す図である。
ショベルの作業場所の提案に関する表示方法の第3例を示す図である。
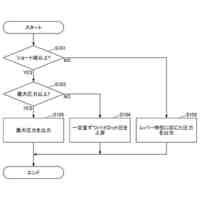
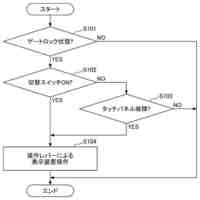
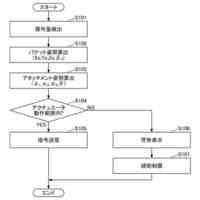
ショベルの作業場所の提案に関する処理の第1例を示す図である。
ショベルの作業場所の提案に関する処理の第2例を示す図である。
稼働支援システムの機能構成の第2例を示す機能ブロック図である。
ショベルの作業場所の提案に関する処理の第3例を示す図である。
稼働支援システムの機能構成の第3例を示す機能ブロック図である。
ショベルの作業場所の提案に関する処理の第4例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
耐震原子炉設備
15日前
鹿島建設株式会社
基礎構造
14日前
株式会社竹中工務店
建築方法
12日前
株式会社クボタ
作業車
6日前
株式会社富田製作所
継手部構造
14日前
住友建機株式会社
ショベル
6日前
住友建機株式会社
作業機械
5日前
住友建機株式会社
ショベル
13日前
住友建機株式会社
ショベル
6日前
住友建機株式会社
ショベル
6日前
住友建機株式会社
作業機械
7日前
住友建機株式会社
ショベル
5日前
株式会社クボタ
作業車両
12日前
日本車輌製造株式会社
建設機械
5日前
日立建機株式会社
建設機械
14日前
株式会社クボタ
作業機
14日前
住友重機械工業株式会社
ショベル
8日前
大仲建設株式会社
スコップ
12日前
住友重機械工業株式会社
ショベル
6日前
戸田建設株式会社
杭頭空間形成装置
8日前
住友重機械工業株式会社
作業機械の制御装置
12日前
ヤンマーホールディングス株式会社
作業機械
13日前
株式会社小松製作所
作業機械
6日前
株式会社マキタ
打撃工具
6日前
日立建機株式会社
作業機械
12日前
コベルコ建機株式会社
作業支援システム
6日前
住友建機株式会社
ショベル、ショベル用コネクタ
5日前
住友建機株式会社
ショベル及びショベルシステム
5日前
しろくま電力株式会社
支柱設置方法及び仮設治具
6日前
大和ハウス工業株式会社
基礎及び基礎の施工方法
6日前
株式会社日立建機ティエラ
建設機械
12日前
住友重機械工業株式会社
遠隔操作ショベルシステム
5日前
住友建機株式会社
作業機械、作業機械の管理システム
14日前
住友建機株式会社
作業機械、作業機械の管理システム
6日前
住友建機株式会社
作業機械用のシステム、及びショベル
5日前
株式会社小松製作所
作業機械
13日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ