TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104196
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2024067829
出願日
2024-04-18
発明の名称
モビリティ用スコアマップを生成する方法、モビリティ用走行制御方法及びモビリティ用走行制御システム
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
弁理士法人共生国際特許事務所
主分類
G05D
1/246 20240101AFI20250702BHJP(制御;調整)
要約
【課題】周辺環境に対応するスコアマップに地形に応じたベクトルマップを併合して最終スコアマップを生成するモビリティ用スコアマップを生成する方法を提供する
【解決手段】モビリティ用スコアマップを生成する方法は、複数のセルを含むローカルマップをロードする段階と、モビリティの周辺環境をスキャンする段階と、モビリティの周辺環境に関する情報からモビリティ周辺の地形を認識する段階と、地形に対応する第1スコアマップを生成する段階と、地形に対応するベクトルマップを生成する段階と、ベクトルマップを第2スコアマップに切替える段階と、第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する段階とを含むことを特徴とする。
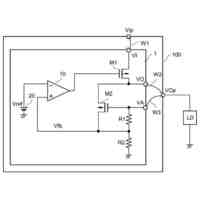
【選択図】 図1
特許請求の範囲
【請求項1】
モビリティの制御器によって、複数のセルを含むローカルマップをロードする段階と、
モビリティに装着された周辺環境スキャン部によって、モビリティの周辺環境をスキャンする段階と、
制御器によって、モビリティの周辺環境に関する情報からモビリティ周辺の地形を認識する段階と、
制御器によって、地形に対応する第1スコアマップを生成する段階と、
制御器によって、地形に対応するベクトルマップを生成する段階と、
制御器によって、ベクトルマップを第2スコアマップに切替える段階と、
制御器によって、第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する段階と、
を含むことを特徴とするモビリティ用スコアマップを生成する方法。
続きを表示(約 1,600 文字)
【請求項2】
前記地形は、
モビリティの下面と上面との間に物理的に存在するすべての物体で定義される障害物と、
すべての面がモビリティの底面と車輪の下端との間に存在する地形で定義される一般地形と、
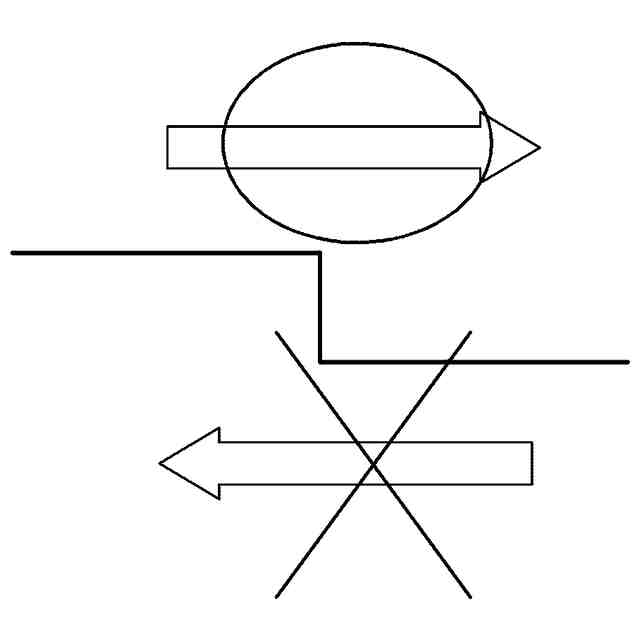
進入方向や速度に応じてモビリティが移動できる地形で定義される特殊地形と、
を含むことを特徴とする請求項1に記載のモビリティ用スコアマップを生成する方法。
【請求項3】
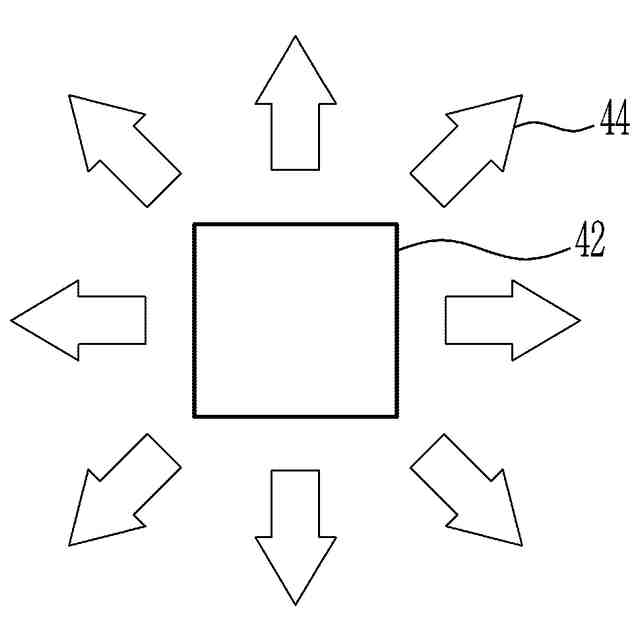
前記ベクトルマップは、前記複数のセルと、複数のセルそれぞれから周囲のセルに移動する複数のベクトルとを含み、各セルには地形の種類が格納され、各ベクトルにはベクトルの方向への移動時にモビリティの最大速度と最小速度が格納され、
地形に応じたベクトルマップを生成する段階は、
モビリティの性能情報を収集する段階と、
障害物の周辺地形のベクトルマップを演算する段階と、
特殊地形のベクトルマップを演算する段階と、
一般地形のベクトルマップを演算する段階と、
を含むことを特徴とする請求項2に記載のモビリティ用スコアマップを生成する方法。
【請求項4】
ベクトルマップを第2スコアマップに切替える段階は、
障害物地形に基づいてスコアを付与する段階と、
最大速度に基づいてスコアを付与する段階と、
特殊地形に基づいてスコアを付与する段階と、
を含むことを特徴とする請求項3に記載のモビリティ用スコアマップを生成する方法。
【請求項5】
障害物地形に基づいてスコアを付与する段階は、障害物が含まれているセルには移動禁止を意味するスコアを付与し、周辺のセルには障害物までの距離に反比例してスコアを付与することによって実行されることを特徴とする請求項4に記載のモビリティ用スコアマップを生成する方法。
【請求項6】
最大速度に基づいてスコアを付与する段階は、最大速度が制限された比率に応じてスコアを付与することによって実行されることを特徴とする請求項4に記載のモビリティ用スコアマップを生成する方法。
【請求項7】
第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する段階は、
任意のセルに付与された少なくとも1つのスコアの最大値を当該セルの最終スコアに設定する段階と、
任意のベクトルに付与された少なくとも1つのスコアの最大値を当該ベクトルの最終スコアに設定する段階と、
を含むことを特徴とする請求項4に記載のモビリティ用スコアマップを生成する方法。
【請求項8】
請求項1に記載の方法によってスコアマップを生成する段階と、
制御器によって、前記スコアマップに基づいて走行経路を生成する段階と、
制御器によって、走行経路に基づいて走行指令を生成する段階と、
制御器によって、生成された走行指令に応じてモビリティの走行を制御する段階と、
を含むことを特徴とするモビリティ用走行制御方法。
【請求項9】
走行経路を生成する段階は、
モビリティの現在位置から目的地までの少なくとも1つの経路を生成する段階と、
少なくとも1つの経路のうち障害物が位置し、あるいは、移動禁止される地域が含まれている不適な経路を削除する段階と、
不適な経路が削除された少なくとも1つの経路のうちスコアが最小になる経路を走行経路として選択する段階と、
を含むことを特徴とする請求項8に記載のモビリティ用走行制御方法。
【請求項10】
走行指令は、速度指令と、トルク指令とを含むことを特徴とする請求項8に記載のモビリティ用走行制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モビリティ用スコアマップを生成する方法、モビリティ用走行制御方法及びモビリティ用走行制御システムに係り、より詳しくは、周辺環境に対応するスコアマップに地形に応じたベクトルマップを併合して最終スコアマップを生成するモビリティ用スコアマップを生成する方法、そして前記最終スコアマップを用いて走行経路を生成し、モビリティの走行を制御するモビリティ用走行制御方法及び走行制御システムに関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
一般に、自律走行モビリティにおいて、走行経路の計画は、ベクトルマップ又は2Dマップ上にモビリティの可能な動作を計画することによって実行される。このような走行経路は2D又は3Dライダーベースで計画され、安定した室内環境では、モビリティは2Dライダーだけでも十分に安全な走行経路を計画し、計画された走行経路に沿って事故なしに走行できる。
しかし、モビリティが2Dライダーベースの走行経路計画を用いて室外で走行する場合、モビリティが走行できる地形も障害物と認識したり、モビリティが走行できない地形を障害物と認識できないことがある。
この背景技術の部分に記載された事項は発明の背景に対する理解を増進させるために作成されたものであって、この技術の属する分野における通常の知識を有する者にすでに知られた従来技術でない事項を含むことができる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
本発明は、周辺環境に対応するスコアマップに地形に応じたベクトルマップを併合して最終スコアマップを生成するモビリティ用スコアマップを生成する方法を提供する。
また、本発明は、最終スコアマップを用いて走行経路を生成し、前記走行経路に基づいてモビリティの走行を制御するモビリティ用走行制御方法及び走行制御システムを提供する。
【課題を解決するための手段】
【0004】
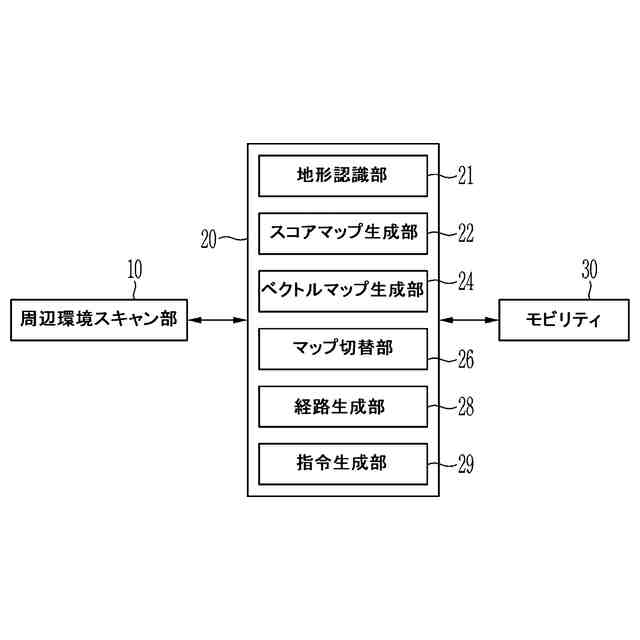
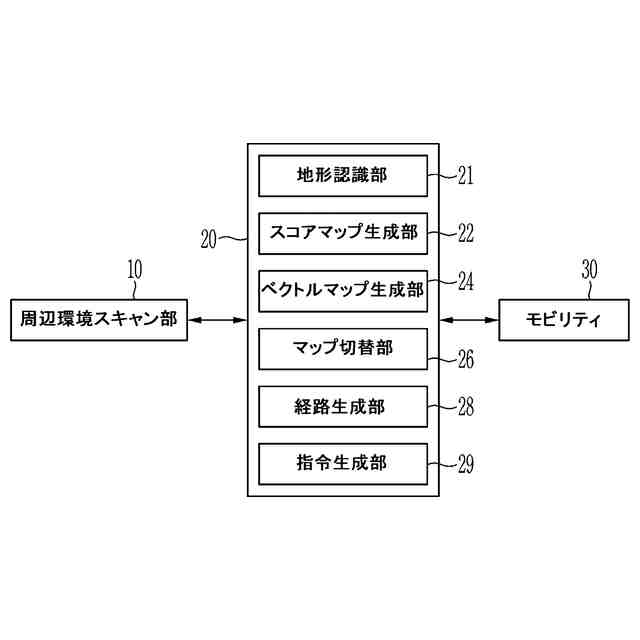
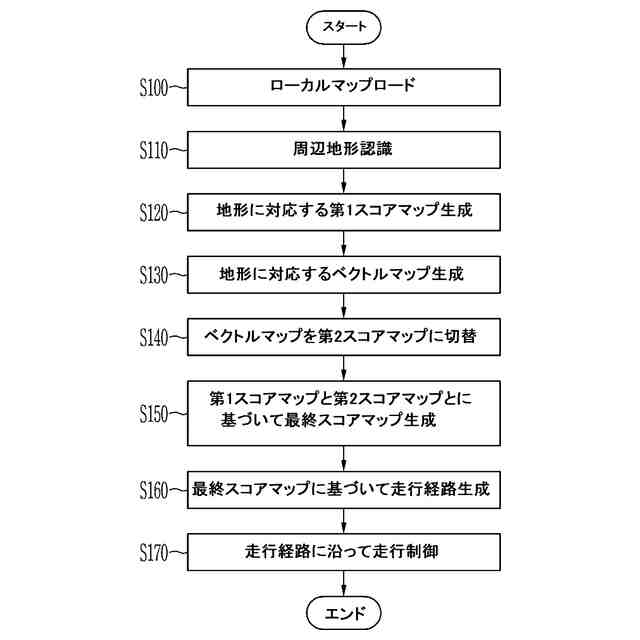
本発明のモビリティ用スコアマップを生成する方法は、モビリティの制御器によって、複数のセルを含むローカルマップをロードする段階と、モビリティに装着された周辺環境スキャン部によって、モビリティの周辺環境をスキャンする段階と、制御器によって、モビリティの周辺環境に関する情報からモビリティ周辺の地形を認識する段階と、制御器によって、地形に対応する第1スコアマップを生成する段階と、制御器によって、地形に対応するベクトルマップを生成する段階と、制御器によって、ベクトルマップを第2スコアマップに切替える段階と、制御器によって、第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する段階とを含むことができる。
【0005】
前記地形は、モビリティの下面と上面との間に物理的に存在するすべての物体で定義される障害物と、すべての面がモビリティの底面と車輪の下端との間に存在する地形で定義される一般地形と、進入方向や速度に応じてモビリティが移動できる地形で定義される特殊地形とを含む。
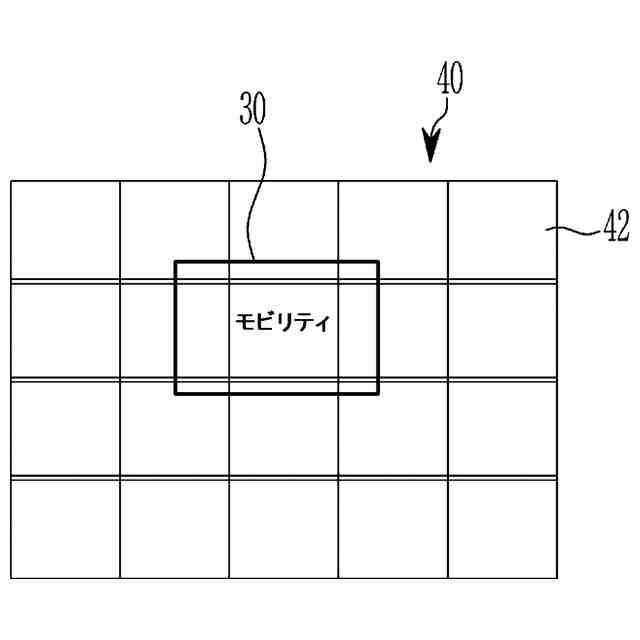
前記ベクトルマップは、前記複数のセルと、複数のセルそれぞれから周囲のセルに移動する複数のベクトルとを含み、各セルには地形の種類が格納され、各ベクトルにはベクトルの方向への移動時にモビリティの最大速度と最小速度が格納される。
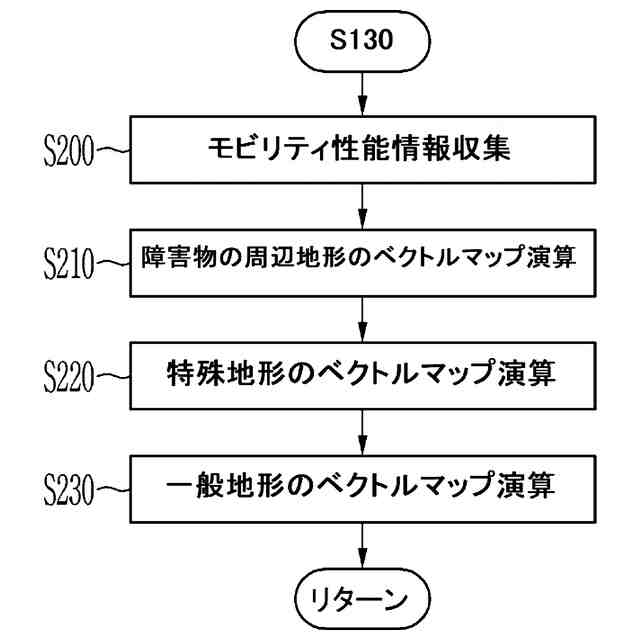
地形に応じたベクトルマップを生成する段階は、モビリティの性能情報を収集する段階と、障害物の周辺地形のベクトルマップを演算する段階と、特殊地形のベクトルマップを演算する段階と、一般地形のベクトルマップを演算する段階とを含むことができる。
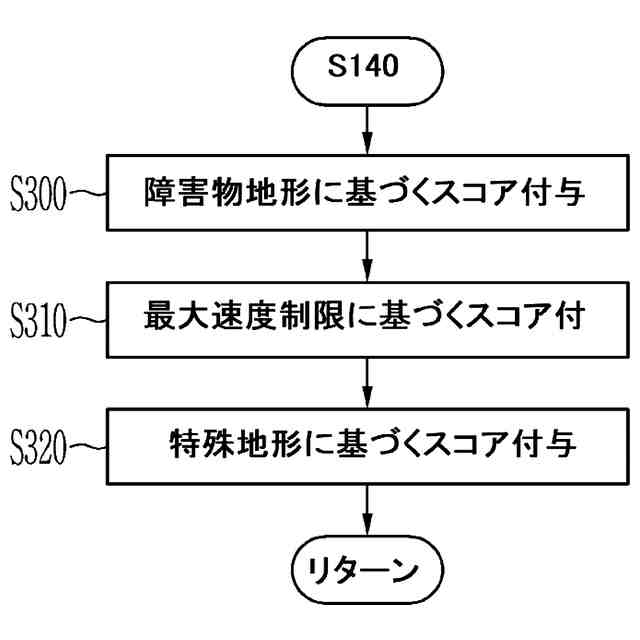
ベクトルマップを第2スコアマップに切替える段階は、障害物地形に基づいてスコアを付与する段階と、最大速度に基づいてスコアを付与する段階と、特殊地形に基づいてスコアを付与する段階とを含む。
【0006】
障害物地形に基づいてスコアを付与する段階は、障害物が含まれているセルには移動禁止を意味するスコアを付与し、周辺のセルには障害物までの距離に反比例してスコアを付与することによって実行される。
最大速度に基づいてスコアを付与する段階は、最大速度が制限された比率に応じてスコアを付与することによって実行される。
第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する段階は、任意のセルに付与された少なくとも1つのスコアの最大値を当該セルの最終スコアに設定する段階と、任意のベクトルに付与された少なくとも1つのスコアの最大値を当該ベクトルの最終スコアに設定する段階とを含むことができる。
【0007】
本発明のモビリティ用走行制御方法は、前記方法によってスコアマップを生成する段階と、制御器によって、前記スコアマップに基づいて走行経路を生成する段階と、制御器によって、走行経路に基づいて走行指令を生成する段階と、制御器によって、生成された走行指令に応じてモビリティの走行を制御する段階とを含むことを特徴とする。
走行経路を生成する段階は、モビリティの現在位置から目的地までの少なくとも1つの経路を生成する段階と、少なくとも1つの経路のうち障害物が位置したり移動禁止される地域が含まれている不適な経路を削除する段階と、不適な経路が削除された少なくとも1つの経路のうちスコアが最小になる経路を走行経路として選択する段階とを含むことができる。
走行指令は、速度指令と、トルク指令とを含む。
【0008】
本発明のモビリティ用走行制御システムは、走行が可能なモビリティと、モビリティに装着され、モビリティの周辺環境をスキャンするように構成された周辺環境スキャン部と、複数のセルを含むローカルマップをロードし、周辺環境スキャン部からスキャンされた周辺環境に関する情報を受信し、周辺環境に関する情報からモビリティ周辺の地形を認識し、認識された地形に対応する第1スコアマップを生成し、認識された地形に応じたベクトルマップを生成し、前記生成されたベクトルマップを第2スコアマップに切替え、第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成し、最終スコアマップに基づいて走行経路を生成し、前記走行経路に基づいてモビリティの走行を制御するように構成された制御器とを含むことを特徴とする。
【0009】
前記地形は、モビリティの下面と上面との間に物理的に存在するすべての物体で定義される障害物と、すべての面がモビリティの底面と車輪の下端との間に存在する地形で定義される一般地形と、進入方向や速度に応じてモビリティが移動できる地形で定義される特殊地形とを含む。
前記ベクトルマップは、前記複数のセルと、複数のセルそれぞれから周囲のセルに移動する複数のベクトルとを含み、各セルには地形の種類が格納され、各ベクトルにはベクトルの方向への移動時にモビリティの最大速度と最小速度が格納される。
地形に応じたベクトルマップを生成する時、前記制御器は、モビリティの性能情報を収集し、障害物の種類に基づいて障害物の周辺地形のベクトルマップを演算し、特殊地形の種類とモビリティの性能情報により特殊地形のベクトルマップを演算し、一般地形の種類とモビリティの性能情報により一般地形のベクトルマップを演算するように構成される。
ベクトルマップを第2スコアマップに切替える時、制御器は、障害物地形に基づいてスコアを付与し、最大速度に基づいてスコアを付与し、特殊地形に基づいてスコアを付与するように構成される。
【0010】
前記制御器は、障害物が含まれているセルには移動禁止を意味するスコアを付与し、周辺のセルには障害物までの距離に反比例してスコアを付与することによって、障害物地形に基づいてスコアを付与するように構成される。
前記制御器は、最大速度が制限された比率に応じてスコアを付与することによって、最大速度に基づいてスコアを付与するように構成される。
第1スコアマップと第2スコアマップとに基づいて最終スコアマップを生成する時、制御器は、任意のセルに付与された少なくとも1つのスコアの最大値を当該セルの最終スコアに設定し、任意のベクトルに付与された少なくとも1つのスコアの最大値を当該ベクトルの最終スコアに設定するように構成される。
走行経路を生成する時、制御器は、モビリティの現在位置から目的地までの少なくとも1つの経路を生成し、少なくとも1つの経路のうち障害物が位置したり移動禁止される地域が含まれている不適な経路を削除し、不適な経路が削除された少なくとも1つの経路のうちスコアが最小になる経路を走行経路として選択するように構成される。
走行経路に基づいてモビリティの走行を制御する時、制御器は、走行経路に基づいて走行指令を生成し、生成された走行指令に応じてモビリティの走行を制御するように構成される。
走行指令は、速度指令と、トルク指令とを含む。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
24日前
株式会社ダイヘン
移動体
29日前
株式会社FUJI
加工機械ライン
今日
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
24日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社オプトン
制御プログラム生成装置
22日前
株式会社鷺宮製作所
制御装置
23日前
キヤノン電子株式会社
加工装置、及び、制御方法
9日前
株式会社ダイフク
物品搬送設備
22日前
株式会社ダイフク
物品搬送設備
22日前
株式会社ダイヘン
負荷時タップ切換器
29日前
株式会社ダイフク
物品搬送設備
15日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
シンフォニアテクノロジー株式会社
異常検知装置
22日前
オムロン株式会社
安全装置
22日前
株式会社計数技研
移動体、及びプログラム
1か月前
三菱電機株式会社
電源回路
9日前
株式会社ダイフク
飛行体制御システム
11日前
個人
ペダル装置、及びペダル装置を具備する自動車
4日前
株式会社ダイヘン
搬送車
2か月前
ローム株式会社
半導体装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
23日前
国立大学法人東海国立大学機構
ミリング加工監視方法
2日前
株式会社豊田自動織機
無人搬送車両
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社大林組
作業機械の自動運転制御システム
1か月前
株式会社FUJI
工作機械
25日前
株式会社東芝
監視制御システム及び監視制御方法
10日前
横河電機株式会社
電流出力装置
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ