TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101973
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219103
出願日
2023-12-26
発明の名称
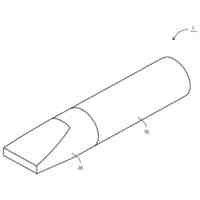
加工機
出願人
株式会社スギノマシン
代理人
弁理士法人グローバル・アイピー東京
主分類
B23Q
1/48 20060101AFI20250701BHJP(工作機械;他に分類されない金属加工)
要約
【課題】主軸を直線に送り、安定して穴明けおよびミル加工できる加工機を提供する。
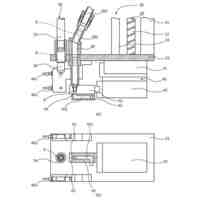
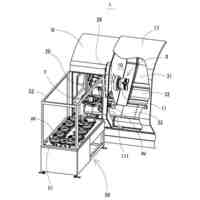
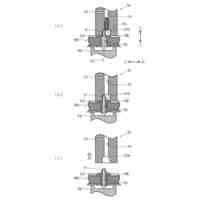
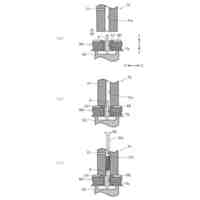
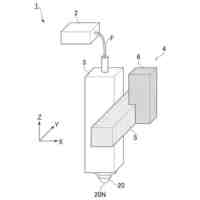
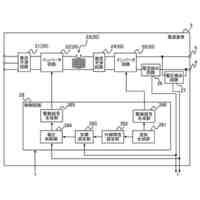
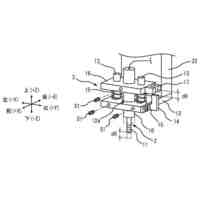
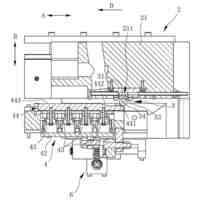
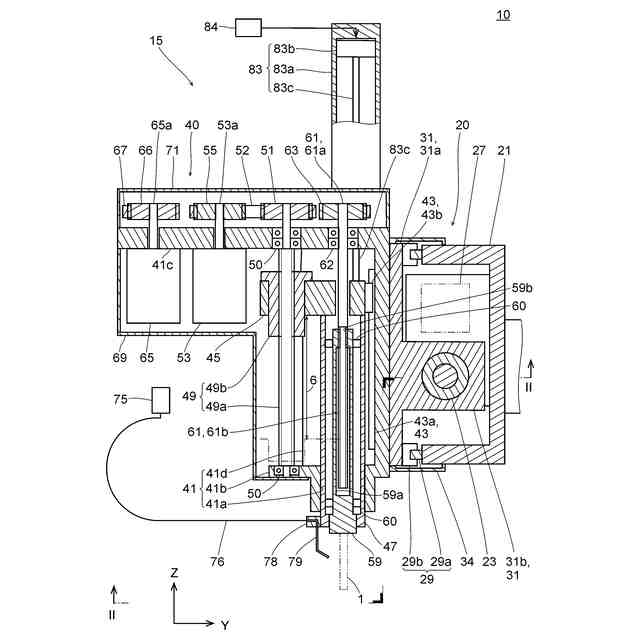
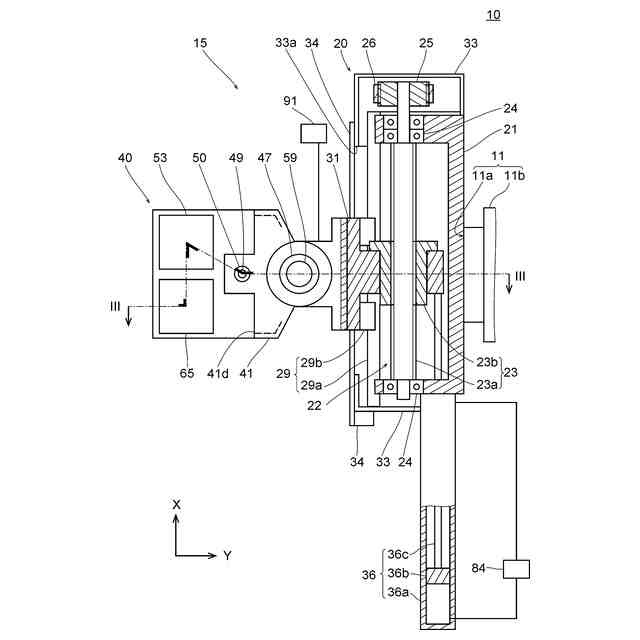
【解決手段】接続面11aを有するロボット11と、接続面11aに配置され、接続面11aに平行なX方向に延びるXガイド29と、Xガイド29に案内されて、X方向に往復するXスライダ31と、Xスライダ31に配置される加工ユニット40であって、X方向に垂直なZ方向に往復するZスライダ45と、工具1を装着可能な主軸59であって、Zスライダ45に回転可能に配置され、Z方向に延びる主軸59と、を有する加工ユニット40と、を有する、加工機10。
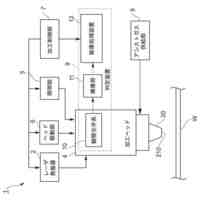
【選択図】図3
特許請求の範囲
【請求項1】
接続面を有するロボットと、
前記接続面に配置され、前記接続面に平行なX方向に延びるXガイドと、
前記Xガイドに案内されて、前記X方向に往復するXスライダと、
前記Xスライダに配置される加工ユニットであって、
前記X方向に垂直なZ方向に往復するZスライダと、
工具を装着可能な主軸であって、前記Zスライダに回転可能に配置され、前記Z方向に延びる主軸と、
を有する加工ユニットと、
を有する、加工機。
続きを表示(約 820 文字)
【請求項2】
前記ロボットは、垂直多関節ロボットである、
請求項1に記載の加工機。
【請求項3】
前記Xスライダ上に配置され、前記X方向及び前記Z方向に垂直なY方向に延びるYガイドと、
前記Yガイドに案内されて、前記Y方向に往復するYスライダと、
を更に有し、
前記加工ユニットは、前記Yスライダに配置される、
請求項1又は2に記載の加工機。
【請求項4】
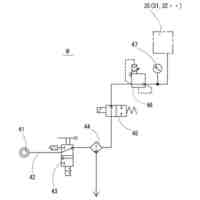
クーラントを供給するクーラント供給装置と、
前記Zスライダに配置され、前記主軸と一体に前記Z方向に往復し、前記工具に向けて前記クーラントを噴出するノズルと、
前記クーラント供給装置と前記ノズルとを接続するクーラント配管と、
を更に有する、請求項1~3のいずれかに記載の加工機。
【請求項5】
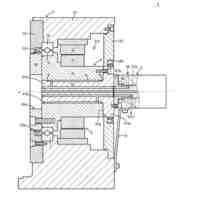
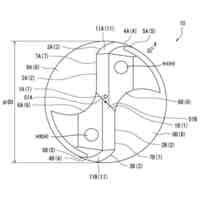
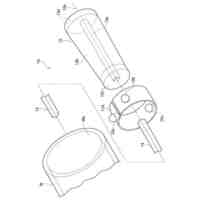
前記加工ユニットは、
ラムガイド穴を有するボディと、
前記Zスライダに配置され、前記ラムガイド穴を貫通するラムと、
を有し、
前記主軸は、前記ラムに配置される、
請求項1~4のいずれかに記載の加工機。
【請求項6】
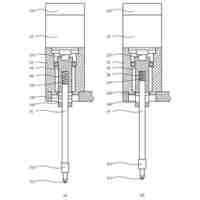
前記加工ユニットは、
ボディと、
Zシリンダであって、
前記ボディに配置されるシリンダボディと、
前記シリンダボディ内を前記Z方向に往復し、前記Zスライダと接続されるピストンと、
を有するZシリンダと、
を有する、請求項1~5のいずれかに記載の加工機。
【請求項7】
前記Xスライダ上に配置され、前記Z方向に平行なW方向に延びるWガイドと、
前記Wガイドに案内されて、前記W方向に往復するWスライダと、
を更に有し、
前記加工ユニットは、前記Wスライダに配置される、
請求項1又は2に記載の加工機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、加工機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
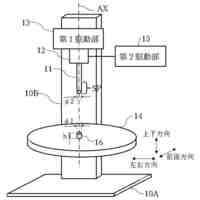
特開2009-248279号公報(以下、特許文献1)に開示されているねじ加工装置は、先端にロボットアームが配置されるロボットと、ロボットアームの先端にフランジを介して支持される昇降機構と、昇降機構に支持される回転機構と、回転機構の先端に配置される支持部と、支持部に支持されるタップと、ロボットの上面に配置されロボットアームの傾きを検知するセンサと、センサから得た情報を演算する演算装置と、演算装置から得た情報を基に昇降機構及び回転機構を操作するコントロールボックスと、を有する。
【0003】
また、特許第5656268号公報(以下、特許文献2)に開示されている産業ロボットは、第1アームと、第2アームと、第1方向へ延出する第1フレームと、第1フレームの延出方向へ移動可能に支持される第1可動体と、第1可動体に対して第1方向と直交する方向である第2方向へ延出する第2フレームと、第2方向へ往復移動可能に支持される第2可動体と、第2可動体に配置され、第1方向及び第2方向に直交する方向に配置される加工具とを有する。
【発明の概要】
【発明が解決しようとする課題】
【0004】
関節ロボットは、直線の軌跡を描くことができない。そのため、安定した加工を行えない場合がある。特許文献1のねじ加工装置は、ミル加工できない。特許文献2の加工機は、ドリル加工できない。
本発明は、主軸を直線に送り、安定して穴明けおよびミル加工できる加工機を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の観点は、
接続面を有するロボットと、
前記接続面に配置され、前記接続面に平行なX方向に延びるXガイドと、
前記Xガイドに案内されて、前記X方向に往復するXスライダと、
前記Xスライダに配置される加工ユニットであって、
前記X方向に垂直なZ方向に往復するZスライダと、
工具を装着可能な主軸であって、前記Zスライダに回転可能に配置され、前記Z方向に延びる主軸と、
を有する加工ユニットと、
を有する、加工機である。
【0006】
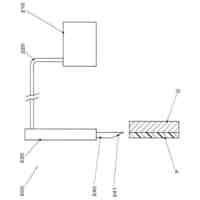
ロボットは、アームを有して良い。接続面は、アームの先端に配置されて良い。接続面は、例えば、フランジである。ロボットは、例えば、垂直多関節ロボット、パラレルリンクロボットである。
Y軸ストロークは、X軸ストロークの半分以下であってよい。
【0007】
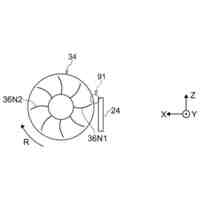
クーラント供給装置は、ロボットが設置される台やロボットの第1軸に配置されて良い。クーラントは、例えば、圧縮空気、オイルミスト、ミストクーラントである。
ノズルは、ラムやZスライダに配置される。ノズルは、ラムやZスライダの先端に接続されて良い。
【0008】
加工ユニットは、Zシリンダを有して良い。Zシリンダは、Z方向に沿って伸縮する。Zシリンダは、ラムやZスライダを先端方向に押し出す。Zシリンダは、例えば、流体シリンダ、特にエアシリンダである。
【0009】
加工機は、Xガイドを支持するXフレームを有しても良い。加工機は、Xフレームに配置され、Xスライダを移動させるX駆動装置を有しても良い。
加工ユニットは、加工ユニットボディを有しても良い。
【0010】
加工機は、Yガイドを支持するYフレームを有しても良い。加工機は、Yフレームに配置され、Yスライダを移動させるY軸駆動装置を有しても良い。Yフレームは、リブを有しても良い。リブは、XY方向に延びて、YフレームとXスライダを接続する。YスライダのYストロークは、XスライダのXストロークに比べて小さい。Yストロークは、Xストロークの好ましくは50%以下、より好ましくは30%以下である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
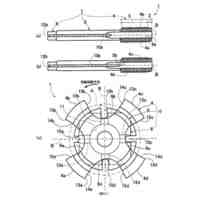
タップ
2か月前
個人
加工機
1か月前
麗豊実業股フン有限公司
ラクトバチルス・パラカセイNB23菌株及びそれを筋肉量の増加や抗メタボリック症候群に用いる用途
1か月前
日東精工株式会社
ねじ締め機
1か月前
株式会社北川鉄工所
回転装置
1か月前
株式会社不二越
ドリル
1か月前
日東精工株式会社
ねじ締め装置
12日前
株式会社FUJI
工作機械
16日前
株式会社FUJI
工作機械
4日前
株式会社アンド
半田付け方法
1か月前
株式会社アンド
半田付け方法
1か月前
村田機械株式会社
レーザ加工機
1か月前
株式会社トヨコー
被膜除去方法
1か月前
村田機械株式会社
レーザ加工機
1か月前
株式会社ダイヘン
溶接装置
5日前
トヨタ自動車株式会社
溶接ヘッド
1か月前
トヨタ自動車株式会社
溶接マスク
12日前
株式会社不二越
超硬合金製ドリル
2か月前
株式会社ダイヘン
溶接装置
5日前
有限会社 ナプラ
ソルダペースト
9日前
住友重機械工業株式会社
加工装置
9日前
トヨタ自動車株式会社
溶接ヘッド
1か月前
株式会社不二越
摩耗判定装置
23日前
日東精工株式会社
はんだこて先の製造方法
1か月前
日東精工株式会社
はんだこて先の製造方法
2か月前
株式会社不二越
波形抽出装置
23日前
株式会社FUJI
周辺装置制御用治具
1か月前
株式会社IHI
支持機構
16日前
DMG森精機株式会社
工作機械
19日前
株式会社ダイヘン
溶接システム
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
25日前
株式会社ジャノメ
インサート挿入装置
1か月前
ブラザー工業株式会社
工作機械
4日前
春日機械工業股ふん有限公司
挟持装置
1か月前
株式会社向洋技研
プロジェクション溶接部材
9日前
株式会社ダイヘン
パルスアーク溶接制御方法
16日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ