TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100965
公報種別
公開特許公報(A)
公開日
2025-07-04
出願番号
2025064509,2023108895
出願日
2025-04-09,2023-06-30
発明の名称
移動制御装置、移動制御方法及び移動制御プログラム
出願人
株式会社ブロードリーフ
代理人
個人
,
個人
主分類
B60W
50/00 20060101AFI20250627BHJP(車両一般)
要約
【課題】移動体の現在位置をより正確に推定することが可能な移動制御装置を提供する。
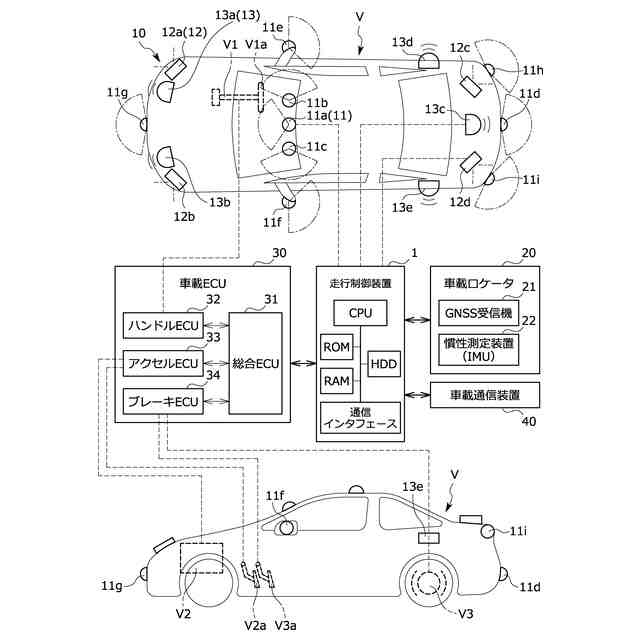
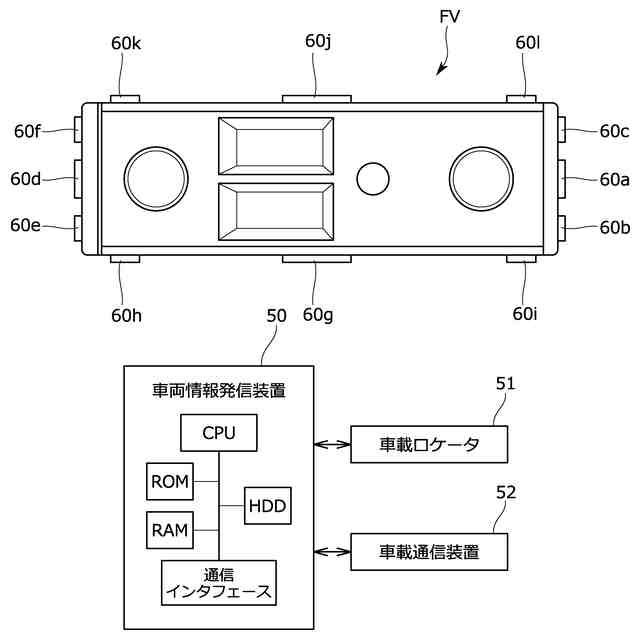
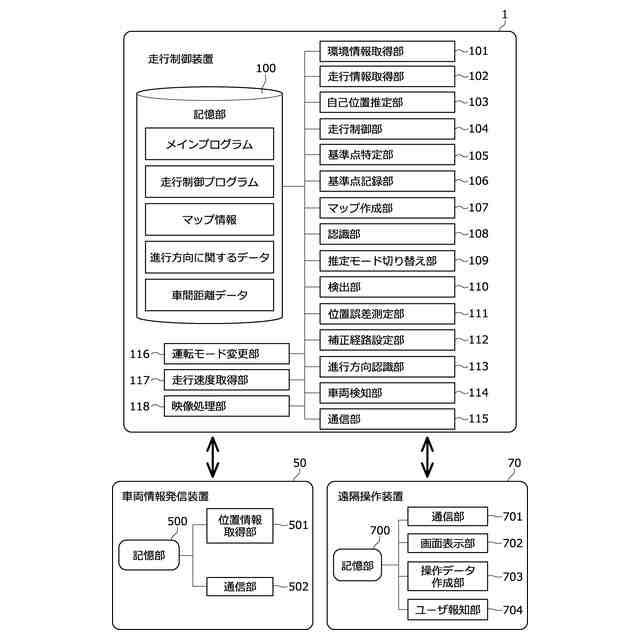
【解決手段】移動制御装置1は、車両Vの現在位置の情報に基づいて車両の移動を制御する。具体的には、移動制御装置1は、GNSS情報に基づいて車両Vの現在位置を推定する自己位置推定部と、車両の周囲における環境情報を取得する環境情報取得部と、車両の進行方向を認識する進行方向認識部とを備えている。自己位置推定部は、GNSS情報を取得できない場合に環境情報に基づいて車両Vの現在位置を推定する。移動制御装置1は、自己位置推定部によって推定された車両Vの現在位置と、進行方向認識部によって認識された車両の進行方向とにより、車両の移動を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の移動を制御する移動制御装置であって、
前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定する自己位置推定部と、
前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得する環境情報取得部と、
前記移動体の進行方向を認識する進行方向認識部と、を備え、
前記自己位置推定部は、前記GNSS情報を取得できない場合に、前記環境情報取得部によって得られた前記環境情報に基づいて前記移動体の現在位置を推定し、
前記移動制御装置は、
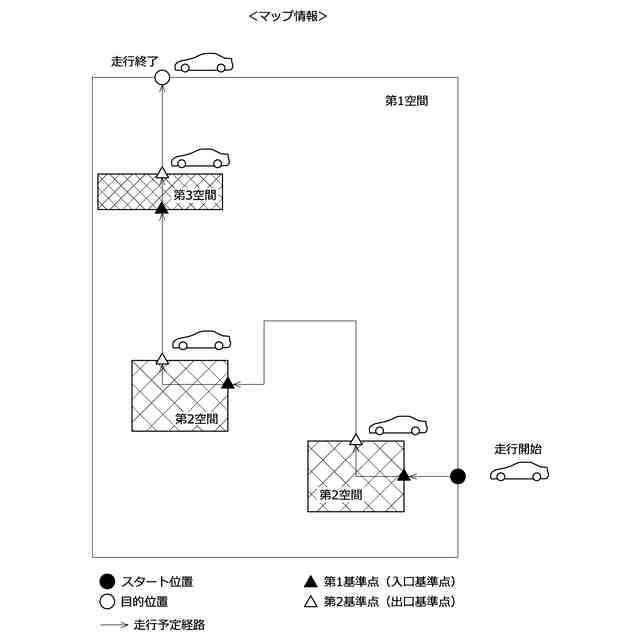
前記進行方向認識部によって第1の進行方向が認識され、かつ、前記自己位置推定部が前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記自己位置推定部が前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記進行方向認識部によって前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定する基準点特定部と、
前記基準点特定部によって特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録する基準点記録部と、
前記基準点記録部によって記録された前記基準点に基づいて前記自己位置推定部による推定状態を切り替える切り替え部と、を備え、
前記切り替え部は、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、
前記自己位置推定部は、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、
前記移動制御装置は、前記自己位置推定部によって推定された前記移動体の現在位置と、前記進行方向認識部によって認識された前記移動体の進行方向とにより、前記移動体の移動を制御する、移動制御装置。
続きを表示(約 1,700 文字)
【請求項2】
移動体の移動を制御するコンピュータによって実行される移動制御方法であって、
前記コンピュータが、
前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定することと、
前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得することと、
前記移動体の進行方向を認識することと、を実行し、
前記移動体の現在位置を推定するにあたって、前記GNSS情報を取得できない場合に、前記環境情報に基づいて前記移動体の現在位置を推定し、
前記コンピュータが、
第1の進行方向が認識され、かつ、前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定することと、
特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録することと、
記録された前記基準点に基づいて推定状態を切り替えることと、を実行し、
前記推定状態を切り替えるにあたって、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、
前記移動体の現在位置を推定するにあたって、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、
前記コンピュータが、推定された前記移動体の現在位置と、認識された前記移動体の進行方向とにより、前記移動体の移動を制御することを実行する、移動制御方法。
【請求項3】
移動体の移動を制御する移動制御装置としてのコンピュータに、
前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定する処理と、
前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得する処理と、
前記移動体の進行方向を認識する処理と、を実行させ、
前記移動体の現在位置を推定する処理では、前記GNSS情報を取得できない場合に、前記環境情報に基づいて前記移動体の現在位置を推定し、
前記コンピュータに、
第1の進行方向が認識され、かつ、前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定する処理と、
特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録する処理と、
記録された前記基準点に基づいて推定状態を切り替える処理と、を実行させ、
前記推定状態を切り替える処理では、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、
前記移動体の現在位置を推定する処理では、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、
前記コンピュータに、推定された前記移動体の現在位置と、認識された前記移動体の進行方向とにより、前記移動体の移動を制御する処理を実行させる、移動制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動制御装置、移動制御方法及び移動制御プログラムに関する。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
近年、運転者の安全性、快適性を実現するために、車両自体が周囲の外部環境の情報を把握し、運転者に代わって車両の走行を制御し、自動運転するためのADAS(先進運転支援システム)を搭載した車両が知られている(例えば、特許文献1参照)。
【0003】
特許文献1に記載の自動運行方法では、車両の走行中にGPS信号を受信して車両の現在位置(絶対位置)をリアルタイムで取得し、車両の位置精度の信頼性が低下した場合には、GPS(衛星測位システム)に基づく座標及び方位角と、慣性測定装置(IMU)に基づく座標及び方位角とを整合させて上記絶対位置を補正することとしている。そして、車両の現在位置の情報に基づいて車両の走行を制御することが行われている。
【先行技術文献】
【特許文献】
【0004】
特開2020-32873号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
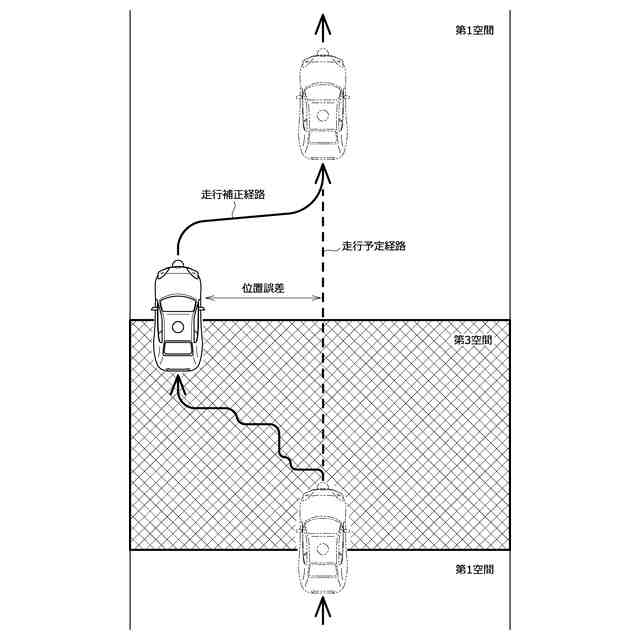
ところで、特許文献1のような移動体の走行制御において、GPS信号(GNSS情報)を取得できない外部環境下であっても、走行する移動体の現在位置をより精度良く推定する技術が求められていた。そして、当該技術を利用して移動体の走行制御に利用することや、運転者やオペレータに対し目的地までの経路を案内するナビゲーションサービスに利用することが求められていた。
【0006】
本発明の目的は、移動体の現在位置をより正確に推定することが可能な移動制御装置、移動制御方法及び移動制御プログラムを提供することにある。
【課題を解決するための手段】
【0007】
前記課題は、本発明の移動制御装置によれば、移動体の移動を制御する移動制御装置であって、前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定する自己位置推定部と、前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得する環境情報取得部と、前記移動体の進行方向を認識する進行方向認識部と、を備え、前記自己位置推定部は、前記GNSS情報を取得できない場合に、前記環境情報取得部によって得られた前記環境情報に基づいて前記移動体の現在位置を推定し、前記移動制御装置は、前記進行方向認識部によって第1の進行方向が認識され、かつ、前記自己位置推定部が前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記自己位置推定部が前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記進行方向認識部によって前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定する基準点特定部と、前記基準点特定部によって特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録する基準点記録部と、前記基準点記録部によって記録された前記基準点に基づいて前記自己位置推定部による推定状態を切り替える切り替え部と、を備え、前記切り替え部は、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、前記自己位置推定部は、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、前記移動制御装置は、前記自己位置推定部によって推定された前記移動体の現在位置と、前記進行方向認識部によって認識された前記移動体の進行方向とにより、前記移動体の移動を制御すること、により解決される。
【0008】
また前記課題は、本発明の移動制御方法によれば、移動体の移動を制御するコンピュータによって実行される移動制御方法であって、前記コンピュータが、前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定することと、前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得することと、前記移動体の進行方向を認識することと、を実行し、前記移動体の現在位置を推定するにあたって、前記GNSS情報を取得できない場合に、前記環境情報に基づいて前記移動体の現在位置を推定し、前記コンピュータが、第1の進行方向が認識され、かつ、前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定することと、特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録することと、記録された前記基準点に基づいて推定状態を切り替えることと、を実行し、前記推定状態を切り替えるにあたって、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、前記移動体の現在位置を推定するにあたって、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、前記コンピュータが、推定された前記移動体の現在位置と、認識された前記移動体の進行方向とにより、前記移動体の移動を制御すること、によっても解決される。
【0009】
また前記課題は、本発明の移動制御プログラムによれば、移動体の移動を制御する移動制御装置としてのコンピュータに、前記移動体に搭載されたGNSS受信機を通じてGNSS情報を取得し、前記GNSS情報に基づいて前記移動体の現在位置を推定する処理と、前記移動体に搭載されたセンサを通じて前記移動体の周囲における環境情報を取得する処理と、前記移動体の進行方向を認識する処理と、を実行させ、前記移動体の現在位置を推定する処理では、前記GNSS情報を取得できない場合に、前記環境情報に基づいて前記移動体の現在位置を推定し、前記コンピュータに、第1の進行方向が認識され、かつ、前記GNSS情報に基づいて前記移動体の現在位置を推定する第1の推定状態から、前記環境情報に基づいて前記移動体の現在位置を推定する第2の推定状態へと変更された位置を第1基準点として特定し、前記第1の進行方向とは異なる第2の進行方向が認識され、かつ、前記第2の推定状態から前記第1の推定状態へと変更された位置を前記第1基準点とは異なる第2基準点として特定する処理と、特定された、前記移動体の進行方向が認識され、かつ、推定状態が変更される位置となる基準点を記録する処理と、記録された前記基準点に基づいて推定状態を切り替える処理と、を実行させ、前記推定状態を切り替える処理では、前記第1基準点に前記移動体が到達したことをもって、又は前記第1基準点から一定の距離内に前記移動体が到達したことをもって、前記第1の推定状態から前記第2の推定状態へと切り替え、前記移動体の現在位置を推定する処理では、切り替えられた前記第2の推定状態により前記環境情報に基づいて前記移動体の現在位置を推定し、前記コンピュータに、推定された前記移動体の現在位置と、認識された前記移動体の進行方向とにより、前記移動体の移動を制御する処理を実行させること、によっても解決される。
【発明の効果】
【0010】
本発明の移動制御装置、移動制御方法及び移動制御プログラムによれば、移動体の現在位置をより正確に推定することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
1か月前
個人
車窓用防虫網戸
2か月前
個人
警告装置
3か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
車輪清掃装置
1か月前
個人
ホイルのボルト締結
17日前
個人
アンチロール制御装置
3か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
1か月前
個人
ワイパーゴム性能保持具
1か月前
個人
車両用スリップ防止装置
23日前
個人
ブレーキシステム
3か月前
個人
アクセルのソフトウェア
22日前
個人
乗合路線バスの客室装置
1日前
株式会社松華
懸架装置
4か月前
個人
キャンピングトレーラー
1か月前
株式会社クラベ
ヒータユニット
2か月前
日本精機株式会社
車載表示装置
18日前
株式会社ニフコ
保持装置
16日前
横浜ゴム株式会社
タイヤ
3か月前
個人
自走式立体型洗車場
4か月前
井関農機株式会社
収穫作業車両
2か月前
個人
自動車ドア開度規制ベルト
3か月前
個人
円湾曲ホイール及び球体輪
1日前
個人
車載小物入れ兼雨傘収納具
15日前
日本精機株式会社
車両用表示装置
2か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
23日前
井関農機株式会社
作業車両
2か月前
株式会社ユーシン
照明装置
2か月前
井関農機株式会社
作業車両
3か月前
帝国繊維株式会社
作業車両
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ