TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025097087
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213160
出願日
2023-12-18
発明の名称
車両制動方法及び車両制動装置
出願人
日産自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B60T
8/1755 20060101AFI20250623BHJP(車両一般)
要約
【課題】目標ピッチ角が達成されるまでの間に大きなピッチ角速度変化が生じにくい車両制動方法及び車両制動装置を提供する。
【解決手段】車両の諸元及び目標制動力に応じた車両の減速度から求められる車体ピッチ角ゲインと目標ピッチ角ゲインとの差分を低減するように目標制動力の周波数に応じて制動力前後配分比を演算し、その制動力前後配分比が達成されるように車両の前輪及び後輪の制動力を制御する。
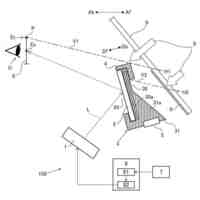
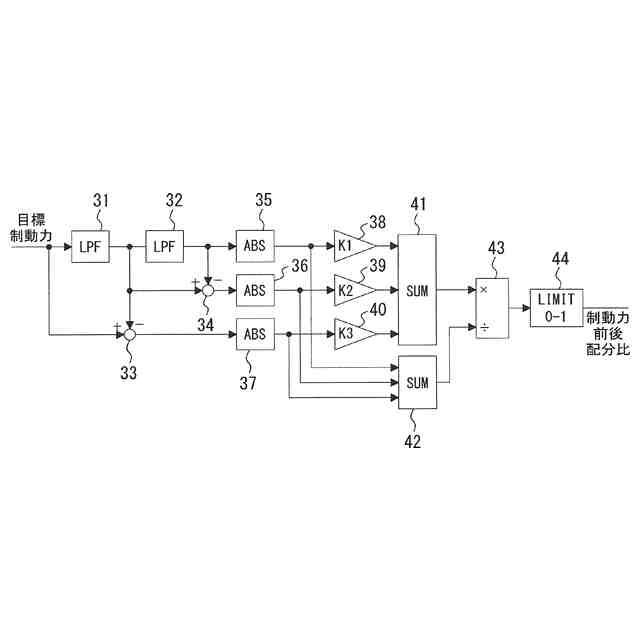
【選択図】図2
特許請求の範囲
【請求項1】
車両の前輪及び後輪の制動力をそれぞれ制御できる車両において、
前記車両における運転者のブレーキ操作量又は自動運転状態における要求減速度の大きさに基づいて前記車両の目標制動力を演算し、
前記車両の目標ピッチ角を演算又は設定し、
前記目標ピッチ角が達成されるように前記目標制動力に応じて前記車両の前輪及び後輪の制動力を制御する車両制動方法において、
前記車両の諸元及び前記目標制動力に応じた前記車両の減速度から求められる前記車両のピッチ角の周波数応答特性上のゲインと前記目標ピッチ角の周波数応答特性上のゲインとの差分を低減するように前記目標制動力の周波数に応じて前記車両の前輪及び後輪の制動力前後配分比を演算し、その制動力前後配分比が達成されるように前記車両の前輪及び後輪の制動力を制御することを特徴とする車両制動方法。
続きを表示(約 1,400 文字)
【請求項2】
前記車両のピッチ角の周波数応答特性上のゲインと前記目標ピッチ角の周波数応答特性上のゲインとを比較し、前記車両のピッチ角の周波数応答特性上のゲインが前記目標ピッチ角の周波数応答特性上のゲインより大きい場合には前記車両のピッチ角の周波数応答特性上のゲインが減少するように制動力前後配分比を設定し、及び/又は、前記車両のピッチ角の周波数応答特性上のゲインが前記目標ピッチ角の周波数応答特性上のゲインより小さい場合には前記車両のピッチ角の周波数応答特性上のゲインが増大するように制動力前後配分比を設定することを特徴とする請求項1に記載の車両制動方法。
【請求項3】
制動力前後配分比に応じた前記車両のピッチ角はサスペンションジオメトリー特性であるフロントサスペンションのアンチダイブ角及びリアサスペンションのアンチリフト角によって決定され、前記アンチダイブ角に対して前記アンチリフト角が大きい場合には制動力前後配分比の前側配分比を大きくすることで前記ピッチ角の周波数応答特性上のゲインが増大し及び/又は後側配分比を小さくすることで前記ピッチ角の周波数応答特性上のゲインが減少し、前記アンチリフト角に対して前記アンチダイブ角が大きい場合には制動力前後配分比の前側配分比を大きくすることで前記ピッチ角の周波数応答特性上のゲインが減少し及び/又は後側配分比を小さくすることで前記ピッチ角の周波数応答特性上のゲインが増大することを特徴とする請求項2に記載の車両制動方法。
【請求項4】
前記目標制動力の周波数を所定の周波数帯域に分割し、各周波数帯域で演算された制動力前後配分比を統括して前記車両の前輪及び後輪の制動力前後配分比を演算することを特徴とする請求項1乃至3の何れか1項に記載の車両制動方法。
【請求項5】
前記目標ピッチ角は、0Hz近傍の低周波数帯域の前記車両のピッチ角の周波数応答特性上のゲインを低減するように設定されることを特徴とする請求項4に記載の車両制動方法。
【請求項6】
前記目標ピッチ角は、車体ピッチ共振周波数帯域の前記車両のピッチ角の周波数応答特性上のゲインを0Hz近傍の低周波数帯域と同等とするように設定されることを特徴とする請求項5に記載の車両制動方法。
【請求項7】
前記目標ピッチ角は、前記車体ピッチ共振周波数帯域よりも高周波数帯域の前記車両のピッチ角の周波数応答特性上のゲインを増大するように設定されることを特徴とする請求項6に記載の車両制動方法。
【請求項8】
車両の前輪及び後輪の制動力をそれぞれ制御できる車両において、
前記車両における運転者のブレーキ操作量又は自動運転状態における要求減速度の大きさに基づいて前記車両の目標制動力を演算し、前記車両の目標ピッチ角を演算又は設定し、前記目標ピッチ角が達成されるように前記目標制動力に応じて前記車両の前輪及び後輪の制動力を制御するコントローラを備えた車両制動装置において、
前記コントローラは、前記車両の諸元及び前記目標制動力に応じた前記車両の減速度から求められる前記車両のピッチ角の周波数応答特性上のゲインと前記目標ピッチ角の周波数応答特性上のゲインとの差分を低減するように前記目標制動力の周波数に応じて前記車両の前輪及び後輪の制動力前後配分比を演算し、その制動力前後配分比が達成されるように前記車両の前輪及び後輪の制動力を制御することを特徴とする車両制動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の前輪及び後輪の制動力をそれぞれ制御できる車両の制動方法及び制動装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
特許文献1には、制動時の車両(車体)のピッチ角を検出し、予め設定された目標ピッチ角との差分を用いて前輪及び後輪の制動力比を制御する車両制動システムが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-77221号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の車両制動システムでは、車両に生じるピッチ角の周波数応答特性が考慮されていないので、目標ピッチ角が達成されるまでの間に、大きなピッチ角速度変化が生じてしまう。
本発明は、目標ピッチ角が達成されるまでの間に大きなピッチ角速度変化が生じにくい車両制動方法及び車両制動装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、車両の前輪及び後輪の制動力をそれぞれ制御できる車両において、車両における運転者のブレーキ操作量又は自動運転状態における要求減速度の大きさに基づいて前記車両の目標制動力を演算し、車両の目標ピッチ角を演算又は設定し、目標ピッチ角が達成されるように目標制動力に応じて車両の前輪及び後輪の制動力を制御する車両制動方法において、車両の諸元及び目標制動力に応じた車両の減速度から求められる車両のピッチ角の周波数応答特性上のゲインと目標ピッチ角の周波数応答特性上のゲインとの差分を低減するように目標制動力の周波数に応じて車両の前輪及び後輪の制動力前後配分比を演算し、その制動力前後配分比が達成されるように車両の前輪及び後輪の制動力を制御する。
【発明の効果】
【0006】
本発明によれば、車両のピッチ角の周波数応答特性を考慮していることから、制動力前後配分比をフィードフォワード的に制御することが可能となり、これにより目標ピッチ角が速やかに達成され且つ達成されるまでの間に大きなピッチ角速度変化が生じにくい。
【図面の簡単な説明】
【0007】
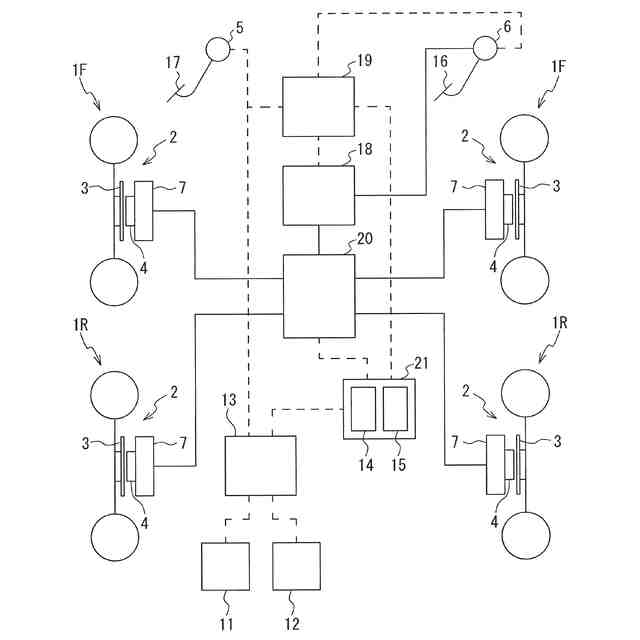
実施形態の車両制動システムの一例の概略構成を示す平面図である。
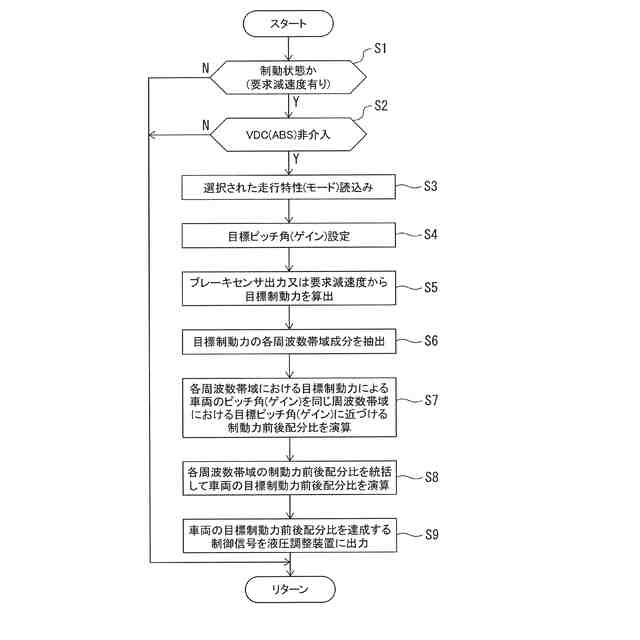
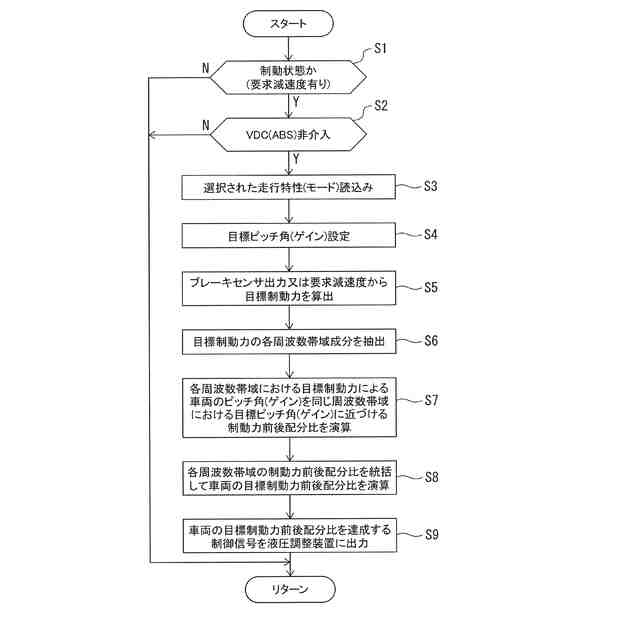
図1の液圧コントローラで行われる演算処理のフローチャートである。
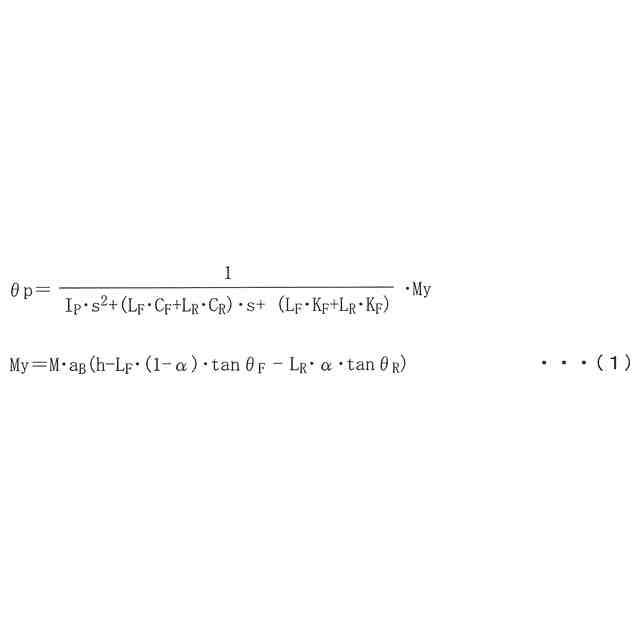
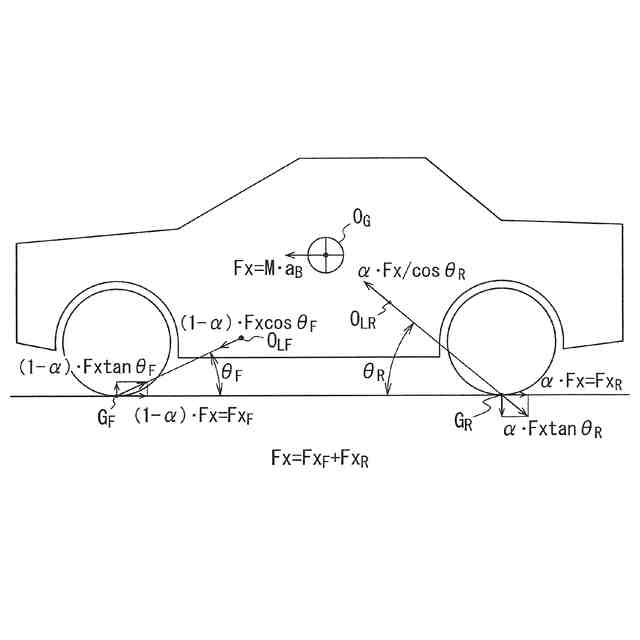
制動時に車両に作用する力の説明図。
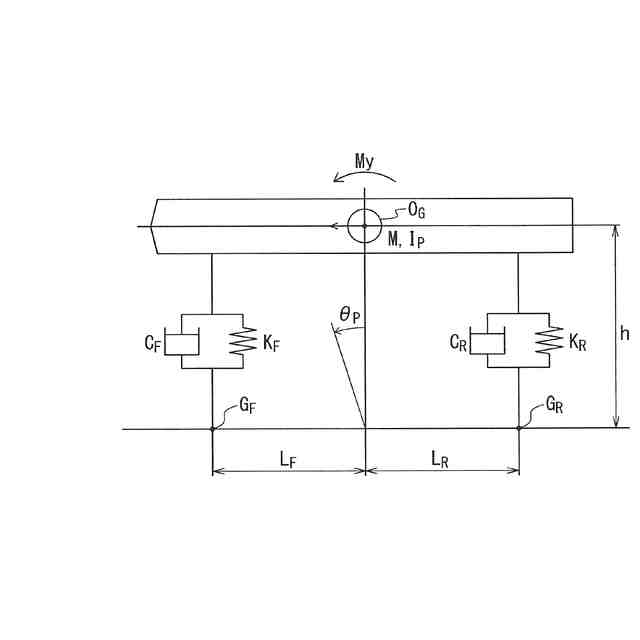
図3の車両のモデル図である。
図4のプライバシーシェード制御で実行される演算処理のフローチャートである。
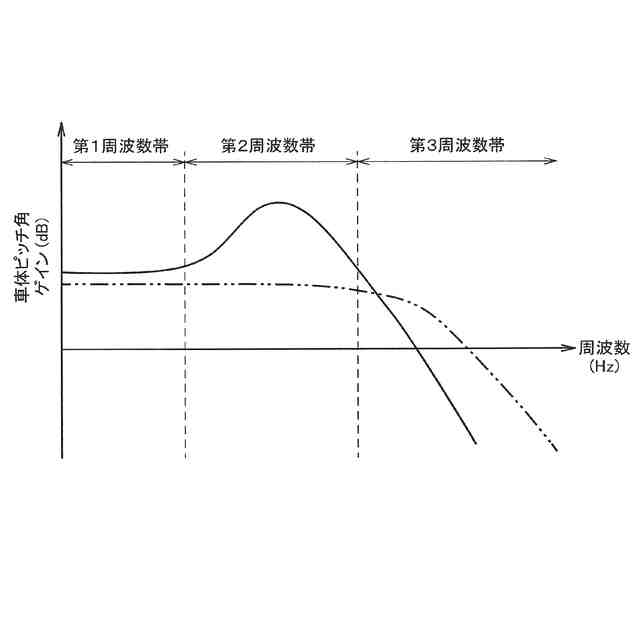
車体(車両)に生じるピッチ角及び目標ピッチ角(ゲイン)の周波数応答特性の説明図である。
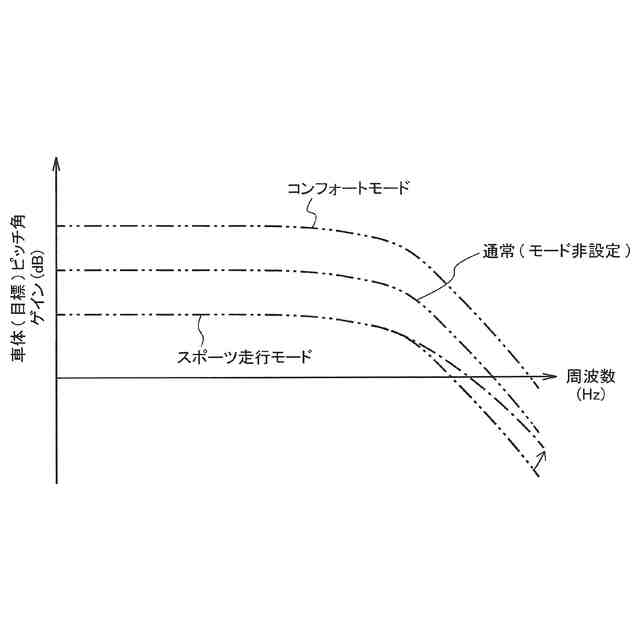
設定(演算)される目標ピッチ角(ゲイン)の周波数応答特性の説明図である。
図5の演算処理のステップS6~S8を構成する演算回路のブロック図である。
図5の演算処理による制動力前後配分比とピッチ角速度の経時変化を示すタイミングチャートである。
制動力前後配分比非制御車両における制動力前後配分比とピッチ角速度経時変化を示すタイミングチャートである。
制動力前後配分比とピッチ角の経時変化を示すタイミングチャートである。
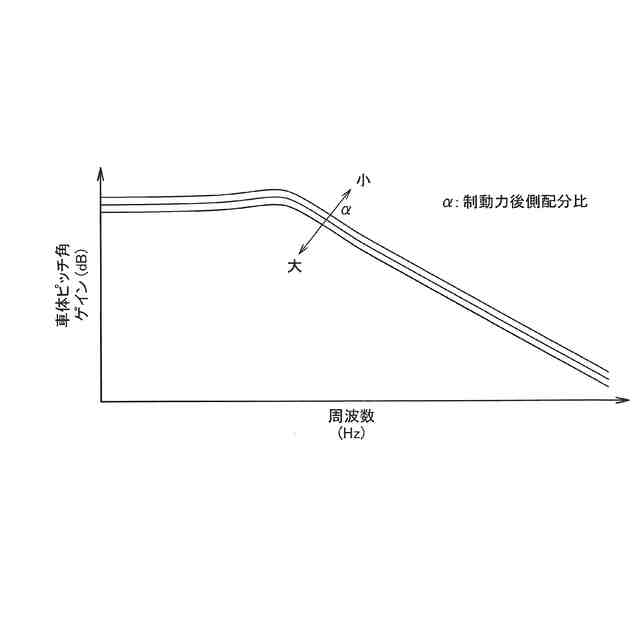
車体ピッチ角の周波数応答特性の説明図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施形態について、図面を参照しつつ説明する。なお、各図面は模式的なものであって、現実のものとは異なる場合がある。また、以下に示す本発明の実施形態は、本発明の技術的思想を具体化するための装置や方法を例示するものであって、本発明の技術的思想は、構成部品の構造、配置等を下記のものに特定するものではない。本発明の技術的思想は、特許請求の範囲に記載された請求項が規定する技術的範囲内において、種々の変更を加えることができる。
【0009】
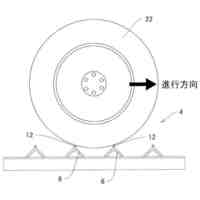
図1に示す実施形態の車両制動システムは、前輪1F及び後輪1Rに設けられたブレーキ装置2の作動状態を制御するものである。前輪1F及び後輪1Rに設けられたブレーキ装置2は、いわゆるディスクブレーキであり、車輪に取り付けられたディスクロータ(ロータ)3をブレーキパッド4で挟み付けて制動するものである。各ブレーキ装置2は、キャリパ内において、ロータ3の一方の端面側にブレーキパッド4を不動状態に配置し、その反対側の端面側に配置されたブレーキパッド4をロータ3に押し付けて制動力を得る。このため、キャリパ内には、液圧(油圧)に応じてブレーキパッド4とロータ3の離接方向に往復移動されるピストンが配置され、このピストンは、ブレーキパッド4側と反対側の受圧面に与えられる液圧が正圧(加圧状態)にあるときにブレーキパッド4をロータ3に押し付ける方向に移動される。すなわち、各ブレーキ装置2は液圧ブレーキ機構7を備える。
【0010】
この実施形態では、自動運転を可能とするために、各ブレーキ装置2のピストン6への液圧を生成する液圧生成装置として電動ブースタ18が用いられている。この電動ブースタ18は、図示しない電動モータ(電動アクチュエータ)で駆動される液圧ポンプであり、各ブレーキ装置2のピストンへの液圧を少なくとも正圧に加圧することができる。正圧は、一般に、大気圧よりも圧力の大きい状態であり、電動モータが駆動されていない状態では、液圧は大気圧と同等となる。なお、この実施形態では、電動ブースタ18はブレーキペダル16と機械的又は液圧的に接続されており、ブレーキペダル16が踏み込まれると、ブレーキペダル16の踏み込み量に応じた正圧の液圧が出力されるように構成されている。なお、電動ブースタ18は、ブースタコントローラ19によって作動状態が制御される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
3日前
個人
警告装置
3か月前
個人
車窓用防虫網戸
2か月前
個人
小型EVシステム
3か月前
日本精機株式会社
ケース
3か月前
個人
ホイルのボルト締結
1か月前
個人
車輪清掃装置
2か月前
日本精機株式会社
照明装置
4か月前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
1日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
1日前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
個人
キャンピングトライク
1か月前
個人
アンチロール制御装置
4か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
4日前
日本精機株式会社
表示装置
4か月前
個人
乗合路線バスの客室装置
16日前
個人
アクセルのソフトウェア
1か月前
個人
ワイパーゴム性能保持具
2か月前
株式会社松華
懸架装置
4か月前
個人
キャンピングトレーラー
1か月前
個人
車両用スリップ防止装置
1か月前
個人
ブレーキシステム
4か月前
井関農機株式会社
収穫作業車両
2か月前
個人
自動車ドア開度規制ベルト
3か月前
個人
円湾曲ホイール及び球体輪
16日前
個人
ステージカー
4か月前
個人
車載小物入れ兼雨傘収納具
1か月前
株式会社ニフコ
保持装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ