TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096206
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024215166
出願日
2024-12-10
発明の名称
光ビームのパターンを用いる位置及び向き追跡を有する計測システム
出願人
株式会社ミツトヨ
代理人
弁理士法人創光国際特許事務所
主分類
B25J
13/08 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドツールを移動させる移動システムと共に使用するための計測システムが提供される。
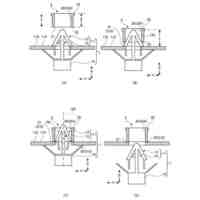
【解決手段】計測システムは、センサ構造と、光ビーム源構造と、処理部と、を含む。光ビーム源構造は、光ビームセンサに光ビームの第1パターン及び光ビームの第2パターンを向けて、光ビーム源構造の位置及び向きを示す。光ビームの第1パターンは、光ビームの第2パターンに対して、光ビームの密度が低い。光ビームセンサからの測定信号は、光ビーム源構造の位置及び向きを決定するために処理される。第1パターン光ビーム及び第2パターン光ビームは、第1パターン光ビームと第2パターン光ビームとを区別することができる少なくとも1つの異なる特性(例えば、波長、偏光、タイミングなど)を有する。
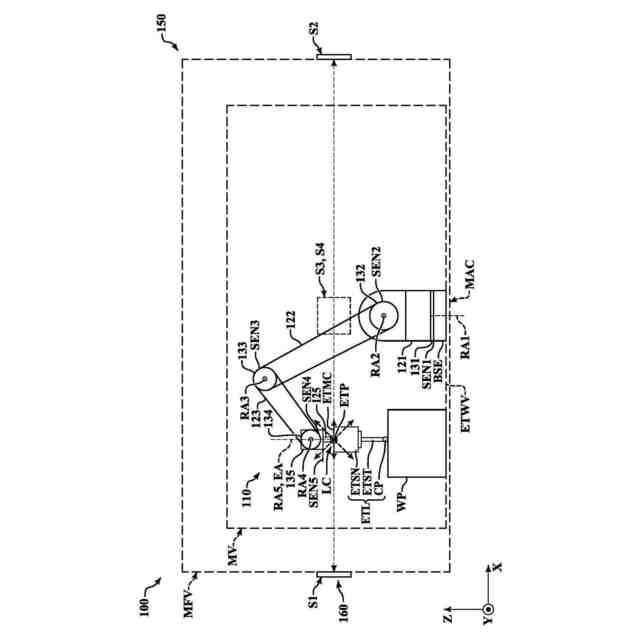
【選択図】図1
特許請求の範囲
【請求項1】
エンドツールを移動させる移動システムとともに使用する計測システムであって、
前記移動システムは、
エンドツールが取り付けられるように構成されたエンドツール取付構造を含む可動構造と、
前記エンドツール取付構造に取り付けられるエンドツールの少なくとも一部分を移動体積内で移動させるように前記可動構造を制御することに少なくとも部分的に基づいて、エンドツールの位置及び向きを制御するよう構成された動作制御システムと、
を備え、
前記計測システムは、
第1位置にある第1光ビームセンサと第2位置にある第2光ビームセンサを少なくとも含む、固定位置に配置された複数の光ビームセンサを含むセンサ構造と、
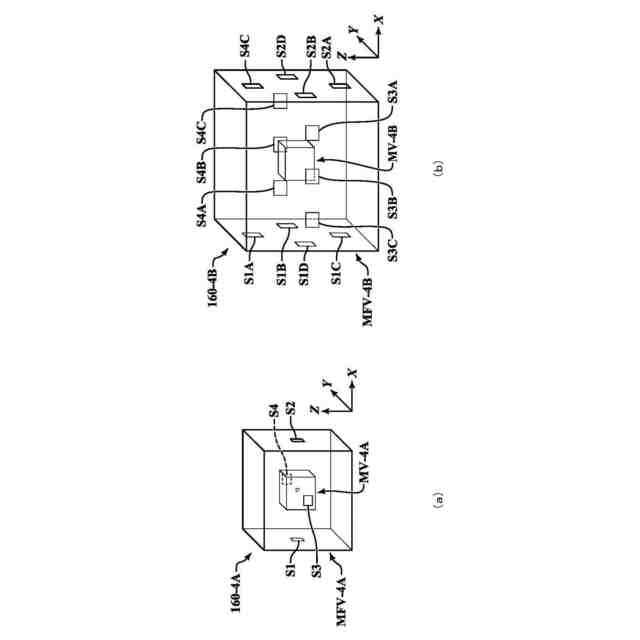
前記センサ構造の光ビームセンサに光ビームの第1パターン及び光ビームの第2パターンを向けて光ビーム源構造の位置及び向きを示す光ビーム源構造であって、
前記光ビーム源構造は、エンドツール又は前記エンドツール取付構造の少なくとも1つに結合されるように構成され、
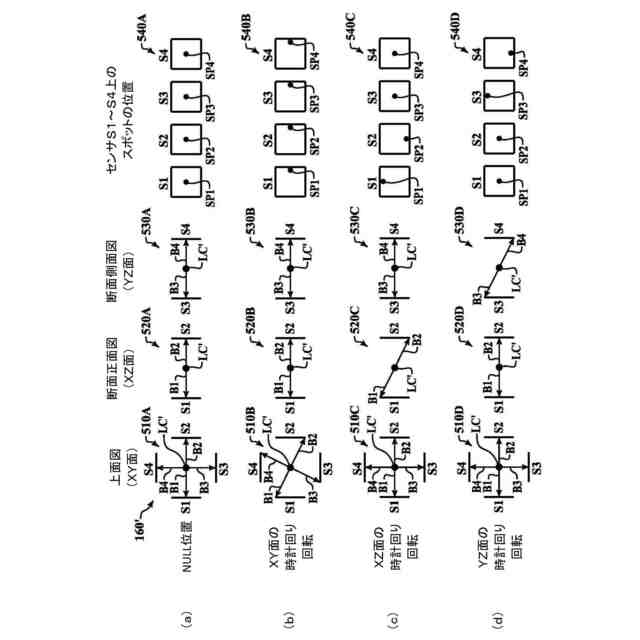
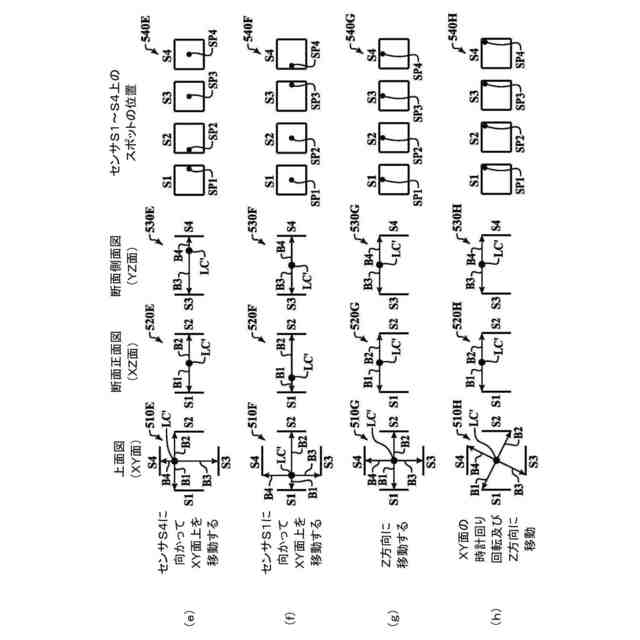
前記光ビームセンサに向けられ受講される前記光ビームの少なくとも一部は、対応する測定信号を前記光ビームセンサに生成させる前記光ビームセンサ上の位置に測定スポットを生成するように構成される、
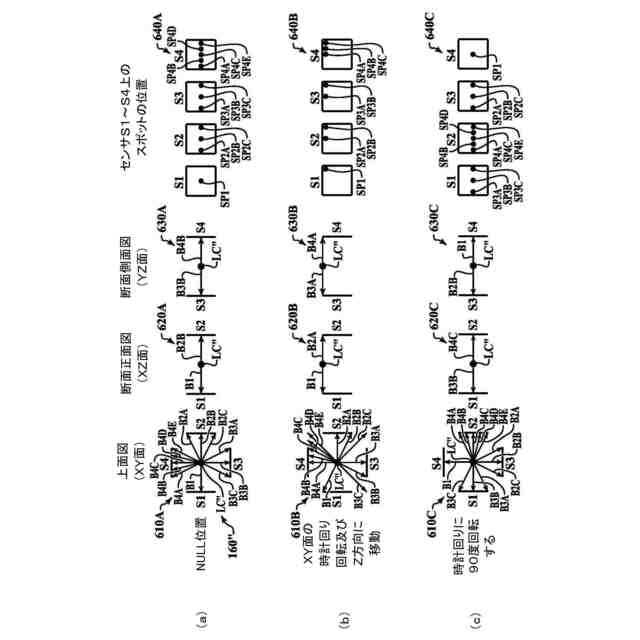
前記光ビームの第1パターンは、第2パターン光ビームの密度が高い前記光ビームの第2パターンに対して、第1パターン光ビームの密度が低い、
光ビーム源構造と、
前記センサ構造の前記光ビームセンサからの前記測定信号を処理して、前記光ビーム源構造の位置及び向きを決定するように構成された処理部と、
を備え、
前記計測システムは、前記光ビーム源構造の少なくとも第1位置が、第1光ビームセンサから第1距離にあり、第2光ビームセンサから第2距離にあり、かつ前記第2距離が前記第1距離よりも大きいように構成され、i)前記第1光ビームセンサに向けられた1つ以上の第1パターン光ビームは、前記第1光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用され、ii)前記第1光ビームセンサに向けられた第2パターン光ビームは、前記第1光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用されず、iii)前記第2光ビームセンサに向けられた1つ以上の第2パターン光ビームは、前記第2光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用される、
計測システム。
続きを表示(約 1,600 文字)
【請求項2】
前記第1パターン光ビーム及び前記第2パターン光ビームは、前記第1パターン光ビームを前記第2パターン光ビームと区別することができる少なくとも1つの異なる特性を有する、
請求項1に記載の計測システム。
【請求項3】
前記少なくとも1つの異なる特性は、異なる波長、異なる偏光、又は異なる送信タイミングの少なくとも1つである、
請求項2に記載の計測システム。
【請求項4】
前記少なくとも1つの異なる特性に基づいて動作するように構成された、少なくとも1つの第1光ビーム選択部をさらに備える、
請求項2に記載の計測システム。
【請求項5】
前記第1光ビームセンサからの前記光ビーム源構造の前記第1距離の表示に少なくとも部分的に基づいて、前記第1光ビーム選択部は、前記第1光ビームセンサに向けられる前記第2パターン光ビームが、前記第1光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用されるのを防止するように構成される、
請求項4に記載の計測システム。
【請求項6】
前記第1光ビーム選択部は、i)第2パターン光ビームBP2LBが第1光ビームセンサに到達することを阻止する、又はii)第1光ビームセンサにおける第2パターン光ビームBP2LBに起因する測定信号が処理部190によって処理されることを防止する、の少なくとも一方を行うために利用されるように構成される、
請求項5に記載の計測システム。
【請求項7】
前記第1パターン光ビームと前記第2パターン光ビームとの間の前記少なくとも1つの異なる特性は、異なる波長又は異なる偏光の少なくとも1つであり、前記第1光ビーム選択部は、前記第2パターン光ビームを遮断するために前記第1光ビームセンサの前方に移動するように構成された波長フィルタ又は偏光フィルタの少なくとも1つを含む第1光ビームフィルタリング部を含む、
請求項5に記載の計測システム。
【請求項8】
i)前記少なくとも1つの異なる特性に基づいて動作するように構成され、ii)波長フィルタ又は偏光フィルタの少なくとも1つを含む第2の光ビームフィルタリング部を備え、第1及び第2の光ビームフィルタリング部は、第1及び第2の光ビームセンサに対してそれぞれフィルタリングを実行するために利用されるように構成される、少なくとも第2光ビーム選択部をさらに備える、
請求項7に記載の計測システム。
【請求項9】
前記計測システムは、前記光ビーム源構造の少なくとも第2位置が、第1光ビームセンサから第3距離にあり、第2光ビームセンサから第4距離にあり、かつ前記第3距離が前記第4距離よりも大きいように構成され、
i)前記第2光ビームセンサに向けられた1つ以上の第1パターン光ビームは、前記第2光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用され、ii)前記第2光ビームセンサに向けられた第2パターン光ビームは、前記第2光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用されず、
iii)前記第1光ビームセンサに向けられた1つ以上の第2パターン光ビームは、前記第1光ビームセンサに、前記処理部による前記処理のための測定信号を生成させるために利用される、
請求項1に記載の計測システム。
【請求項10】
前記光ビーム源構造は、前記光ビームの第1パターン及び前記光ビームの第2パターンを同時に前記センサ構造の前記光ビームセンサに向けるように構成される、
請求項1に記載の計測システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測及び移動システムに関し、より詳細には、位置及び向きを追跡する、例えばロボットなどの移動システムとともに利用される計測システムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
製造、被加工物検査、及び他のプロセスでは、特定の機能を実行する機械製の移動システムが頻繁に使用される。例えば、ロボットシステム又は他の移動システムは、(例えば、被加工物検査、製造等に関して)特定の動作を実行するためにエンドツールを移動させるために利用することができる。いくつかの適用例では、利用できる様々なタイプのロボットとして、関節ロボット(Articulated Robot)、選択的順応性多関節ロボットアーム(SCARA)ロボット、直角座標ロボット(Cartesian Robot)、円筒座標ロボット(Cylindrical robot)、球座標ロボット(Spherical Robot)などがある。ロボットに含まれる構成要素の一例として、(例えば、関節ロボットシステムの一種であってもよい)SCARAロボットシステムは、典型的には、ベースと、ベースに回転結合された第1アーム部と、第1アーム部の端部に回転結合された第2アーム部と、を有してもよい。様々な構成では、エンドツールは、(例えば、ある作業及び/又は検査作業を行うために)第2アーム部の端部に結合されてもよい。このようなシステムは、アーム部の位置決め及びそれに応じるエンドツールの位置決めを決定/制御するために利用される位置センサ(例えば、回転エンコーダ)を含んでもよい。様々な実施態様において、このようなシステムの位置決め精度は、特定の要因(例えば、ロボットシステムの機械的安定性と組み合わせた回転エンコーダの性能など)によって制限されるが、約100ミクロンである。
【0003】
参照によりその全体が本明細書に組み込まれる米国特許4,725,965号(本明細書では‘965特許と呼ばれる)は、SCARAシステムの精度を改善するためのいくつかの校正技法を開示している。‘965特許に記載されているように、運動力学モデルを校正するために、アーム部は、固定基準点の上方にエンドツールを配置する第1構成に配置される。次に、アーム部を第2角度構成に配置し、エンドツールが基準点に対して再び位置合わせされるように名目上配置される。運動力学モデルにおける誤差は、アーム部が第1角度構成から第2角度構成に切り替えられた際の、基準点からのエンドツールの位置のずれから計算される。そして、計算された誤差に応じて運動力学モデルが補正される。手順は、SCARAロボットの運動力学モデルが校正されたと見なされる、誤差がゼロに達する時点まで繰り返される。‘965号特許でさらに説明されるように、校正技法は、特定のカメラの使用を含んでもよい。
【0004】
‘965号特許に記載されるような技法は、ロボットシステムを校正するために利用される場合があるが、このような技法(例えば、多くの時間を必要とする可能性がある、及び/又は特定の動作中にロボットの全ての可能な向きに対して所望のレベルの精度を提供できない可能性があるなど)の利用は、特定の用途では、あまり望ましくない場合がある。こうした問題を改善できる(例えば、被加工物測定、製造等のプロセスのための位置及び向き決定の信頼性、再現性、速度などを向上させる)システムが望まれる。
【発明の概要】
【0005】
この概要は、発明を実施するための形態において以下でさらに説明される概念の選択を簡略化された形態で紹介するために提供される。この概要は、特許請求される主題の重要な特徴を特定することを意図するものではなく、特許請求される主題の範囲を決定する助けとして使用されることを意図するものでもない。
【0006】
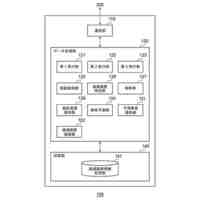
一の態様によれば、エンドツールを移動させる移動システムと共に使用する計測システムが提供される。移動システムは、可動構造と、動作制御システムと、を含む。可動構造は、エンドツールが取り付けられるように構成されたエンドツール取付構造を含む。動作制御システムは、エンドツール取付構造に取り付けられているエンドツールの少なくとも一部を移動体積内で移動させるように、可動構造を制御することに少なくとも部分的に基づいて、エンドツールの位置及び向きを制御するように構成されている。
【0007】
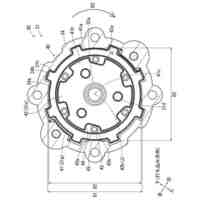
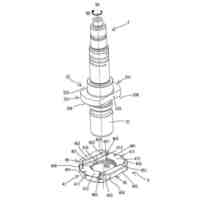
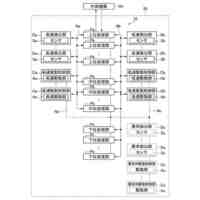
計測システムは、センサ構造と、光ビーム源構造と、処理部とを含む。センサ構造は、少なくとも第1位置にある第1光ビームセンサと、第2位置にある第2光ビームセンサと、を含む、固定位置に配置された複数の光ビームセンサを含む。光ビーム源構造は、光ビームの第1パターン及び光ビームの第2パターンをセンサ構造の光ビームセンサに向けて、センサ構造の光ビームセンサに向けて、光ビーム源構造の位置及び向きを示すように構成される。
【0008】
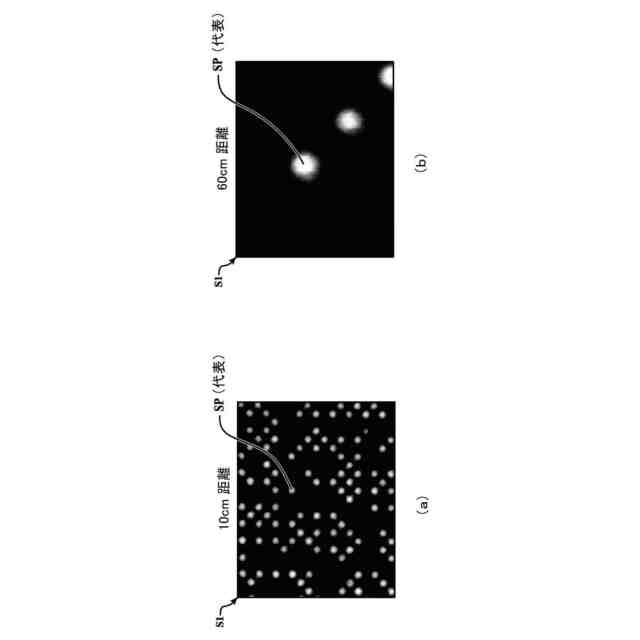
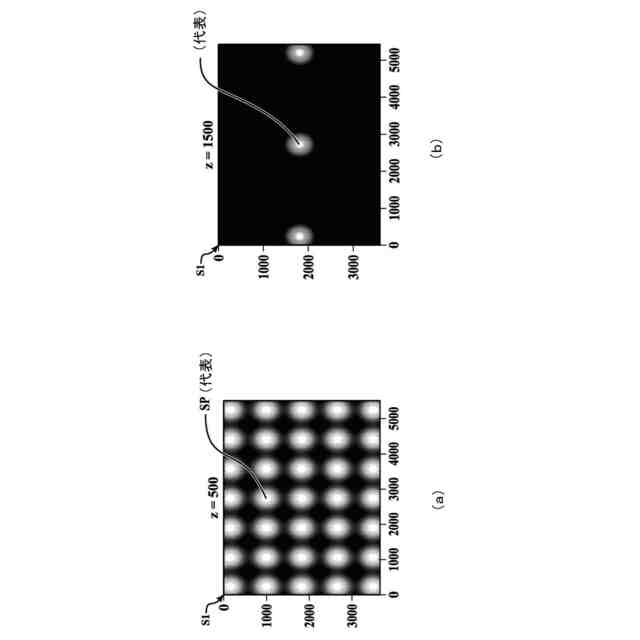
光ビーム源構造は、エンドツール又はエンドツール取付構造の少なくとも1つに結合されるように構成される。光ビームセンサに向けられ、受け取られる光ビームの少なくとも一部は、光ビームセンサ上に測定スポットを生成するように構成されており、これにより光ビームセンサが対応する測定信号を生成する。光ビームの第1パターンは、第2パターン光ビームの密度が高い光ビームの第2パターンに対して、第1パターン光ビームの密度が低い。処理部は、センサ構造の光ビームセンサからの測定信号を処理して、光ビーム源構造の位置及び向きを決定するように構成される。
【0009】
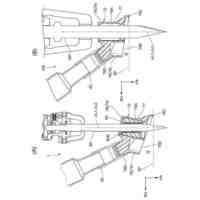
計測システムは、光ビーム源構造の少なくとも第1位置が、第1光ビームセンサから第1距離にあり、第2光ビームセンサから第2距離にあり、かつ第2距離が第1距離より大きいように構成されており、第1光ビームセンサに向けて向けられる1つ以上の第1パターン光ビームは、第1光ビームセンサに、処理部による処理のための測定信号を生成させるために利用され、第1光ビームセンサに向けられる第2パターン光ビームは、第1光ビームセンサに、処理部による処理のための測定信号を生成させるために利用されない(例えば、様々な実施態様において、第2パターン光ビーム及び/又はそれによって生成された信号は、少なくともブロックされるか、フィルタリングされるか、選択されないか、又はその他の方法で利用されない)、さらに、第2光ビームセンサに向けられる1つ以上の第2パターン光ビームBP2LBは、第2光ビームセンサに、位置及び向きを決定する処理のための測定信号を生成させるために利用される。様々な実装態様において、第1パターン光ビーム及び第2パターン光ビームは、第1パターン光ビームを第2パターン光ビームと区別することができる少なくとも1つの異なる特性を有する(例えば、波長、極性、タイミングなど)。
【0010】
別の態様によれば、光ビーム源構造を含む計測システムを動作させる方法が提供される。本方法は、光ビーム源構造を動作させて、光ビームの第1パターン及び光ビームの第2パターンをセンサ構造の光ビームセンサに向けて、光ビーム源構造の位置及び向きを示すことを含む。光ビームの第1パターンは、第2パターン光ビームの密度が高い光ビームの第2パターンに対して、第1パターン光ビームの密度が低い。本方法はさらに、センサ構造の光ビームセンサからの測定信号を処理して、光ビーム源構造の位置及び向きを決定することを含み、光ビーム源構造の少なくとも第1位置は、第1光ビームセンサから第1距離にあり、第2光ビームセンサから第2距離にあり、かつ第2距離が第1距離より大きい場合においては、i)第1光ビームセンサに向けて向けられる1つ以上の第1パターン光ビームは、第1光ビームセンサに、位置及び向きを決定する処理のための測定信号を生成させるために利用され、ii)第1光ビームセンサに向けて向けられる第2パターン光ビームは、第1光ビームセンサに、位置及び向きを決定する処理のための測定信号を生成させるために利用されず(例えば、様々な実施態様において、第2パターン光ビーム及び/又はそれによって生成された信号は、少なくともブロックされるか、フィルタリングされるか、選択されないか、又はその他の方法で利用されない)、iii)第2光ビームセンサに向けて向けられる1つ以上の第2パターン光ビームは、第2光ビームセンサに、位置及び向きを決定する処理のための測定信号を生成させるために利用される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
22日前
株式会社ジャノメ
ロボット
11日前
個人
ペグハンマおよびペグハンマ用部品
15日前
株式会社ダイヘン
搬送装置
15日前
住友重機械工業株式会社
教示装置
8日前
川崎重工業株式会社
ロボット
9日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
15日前
住友重機械工業株式会社
支援装置
15日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
15日前
アピュアン株式会社
衝撃工具
17日前
株式会社マキタ
電気機器
9日前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
11日前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
11日前
株式会社リコー
多関節ロボット
15日前
SMC株式会社
ベルヌーイグリッパ
11日前
セイコーエプソン株式会社
ロボット
25日前
株式会社マキタ
電動工具
29日前
株式会社マキタ
回転工具
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
8日前
SMC株式会社
コンプライアンスユニット
1か月前
株式会社永木精機
締結用回動体
8日前
住友重機械工業株式会社
減速装置選定支援装置
15日前
個人
工具、工具セット、部材取外し方法
25日前
日産自動車株式会社
ロックプレートの圧入治具
9日前
AMATAMA株式会社
制御装置
10日前
株式会社マキタ
打ち込み工具
25日前
株式会社マキタ
打ち込み工具
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ