TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094957
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2025047831,2023550988
出願日
2025-03-24,2021-09-30
発明の名称
デジタル装置
出願人
ファナック株式会社
代理人
個人
,
個人
,
個人
主分類
G05B
19/4069 20060101AFI20250618BHJP(制御;調整)
要約
【課題】リアル装置の挙動を示す動作状態データを用いて、より正確なリアル装置の状態を再現すること。
【解決手段】産業機械制御システムは、産業機械を制御する制御装置を含むリアル装置及び該リアル装置をソフトウェアにて模倣するデジタル装置からなる産業機械制御システムであって、前記デジタル装置は、前記リアル装置において取得された動作状態データを前記デジタル装置に入力する入力部を備え、該入力部に入力された前記動作状態データにより、前記リアル装置を前記デジタル装置で模倣する。
【選択図】図1
特許請求の範囲
【請求項1】
産業機械を制御する制御装置を含むリアル装置及び該リアル装置をソフトウェアにて模倣するデジタル装置からなる産業機械制御システムであって、
前記デジタル装置は、前記リアル装置において取得された動作状態データを前記デジタル装置に入力する入力部を備え、
該入力部に入力された前記動作状態データにより、前記リアル装置を前記デジタル装置で模倣する、産業機械制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記動作状態データには、前記リアル装置の動作状態データと前記デジタル装置の動作状態データの差分データを含む、請求項1に記載の産業機械制御システム。
【請求項3】
前記動作状態データには、前記リアル装置から測定された動作状態データ、検出された動作状態データ、又は前記リアル装置内で作成された制御量の少なくともひとつを含む、請求項1に記載の産業機械制御システム。
【請求項4】
前記デジタル装置は、前記差分データを入力することにより、前記リアル装置で実行されるプログラム又は前記リアル装置に設定されるパラメータを修正する、請求項2に記載の産業機械制御システム。
【請求項5】
前記動作状態データは、少なくとも信号処理速度、帰還量、CPU性能、消費電力、又はモータ温度のいずれかを含む、請求項1から請求項4のいずれか1項に記載の産業機械制御システム。
【請求項6】
前記デジタル装置は、前記動作状態データが前記信号処理速度の場合、プログラムに含まれる命令毎の処理時間を用いて前記リアル装置の動作を再現する、請求項5に記載の産業機械制御システム。
【請求項7】
前記デジタル装置は、前記動作状態データが前記帰還量の場合、少なくとも位置フィードバック、速度フィードバック、又は電流フィードバックの帰還量のいずれかを用いて前記リアル装置の動作を再現する、請求項5に記載の産業機械制御システム。
【請求項8】
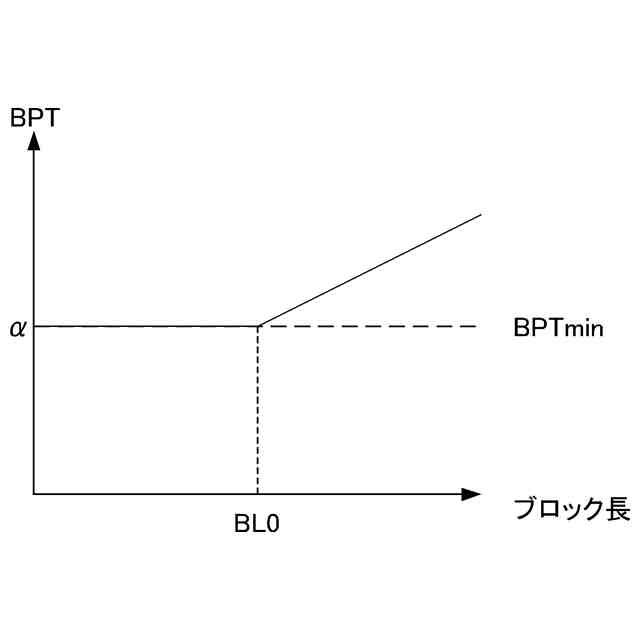
前記デジタル装置は、前記動作状態データが前記CPU性能の場合、前記制御装置の指令処理速度の限界値、及びプログラムのブロック長と前記指令処理速度との関係を示す情報を用いてプログラムを修正する、請求項5に記載の産業機械制御システム。
【請求項9】
前記デジタル装置は、前記動作状態データが前記消費電力の場合、前記リアル装置に含まれるモータの送り速度又は主軸回転数と当該送り速度又は主軸回転数のときの消費電力との関係を用いてプログラムを修正する、請求項5に記載の産業機械制御システム。
【請求項10】
前記デジタル装置は、前記動作状態データが前記モータ温度の場合、前記リアル装置に含まれるモータの回転数又は電流と、前記モータの回転時間と、前記モータのモータ温度と、の関係を示す情報を用いて前記モータに関するアラームの発生を再現する、請求項5に記載の産業機械制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業機械制御システムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
産業機械及びそれらを制御・駆動する制御装置やモータ、アンプ等の駆動装置とからなるリアル装置を、上記の産業機械、制御装置、駆動装置等の個々を理論値に基づいてモデル化したデジタルシミュレータは従来より開発されている。
また、そのデジタルシミュレータは、個々の装置をソフトウェア的に再現した構造になっているのが一般的である。
この点、プラントに設置されたフィールド機器を制御する制御機器を動作させるソフトウェアを作成及びデバッグし、模擬入力又は制御機器への入力とソフトウェアとに従って制御機器の作動状態をシミュレーションするクラウドを有し、シミュレーションの作動結果と制御機器からの出力又は模擬入力とに基づいてソフトウェアのデバッグすることで、高品位なエンジニアリングを提供可能な技術が知られている。例えば、特許文献1参照。
【先行技術文献】
【特許文献】
【0003】
特開2020-52812号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のようなデジタルシミュレータは、産業機械及びそれらを制御・駆動する制御装置やモータ、アンプ等の駆動装置とからなるリアル装置を個々に模擬・模倣するが、その模擬・模倣には限界があり、リアル装置の挙動を正確に再現することは難しい。
その理由は、リアル装置には、ソフトウェアで簡単に模擬できない要素、例えば、通信間の遅れ、機械的ロス、CPU(Central Processing Unit)の性能、周囲環境による変化等がその原因となる。
【0005】
そこで、リアル装置の挙動を示す動作状態データを用いて、より正確なリアル装置の状態を再現することが望まれている。
【課題を解決するための手段】
【0006】
本開示の産業機械制御システムの一態様は、産業機械を制御する制御装置を含むリアル装置及び該リアル装置をソフトウェアにて模倣するデジタル装置からなる産業機械制御システムであって、前記デジタル装置は、前記リアル装置において取得された動作状態データを前記デジタル装置に入力する入力部を備え、該入力部に入力された前記動作状態データにより、前記リアル装置を前記デジタル装置で模倣する。
【発明の効果】
【0007】
一態様によれば、リアル装置の挙動を示す動作状態データを用いて、より正確なリアル装置の状態を再現することができる。
【図面の簡単な説明】
【0008】
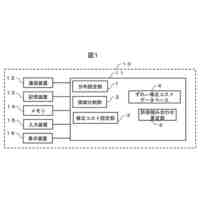
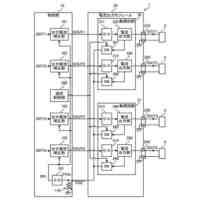
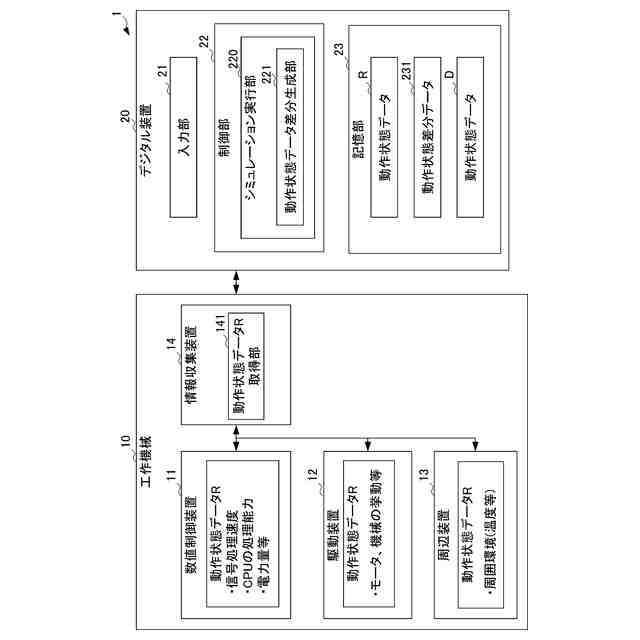
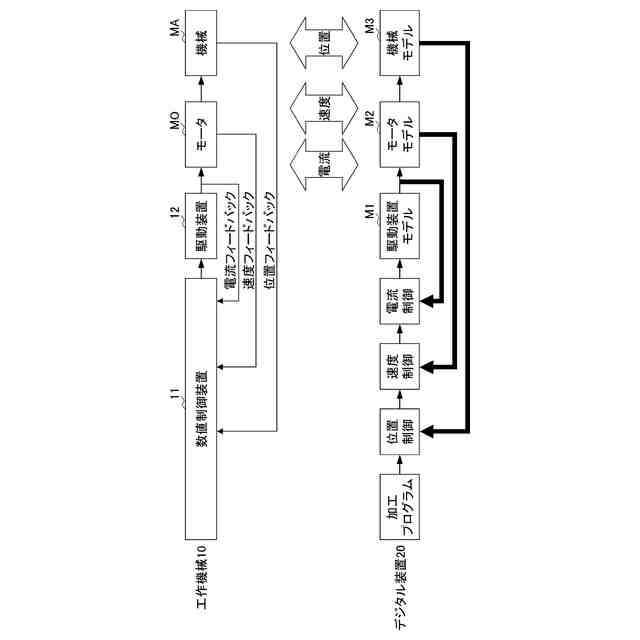
一実施形態に係る産業機械制御システムの機能的構成例を示す機能ブロック図である。
実際の信号処理速度を用いてラダー制御装置の動作を再現する場合の産業機械制御システムの動作例を示す図である。
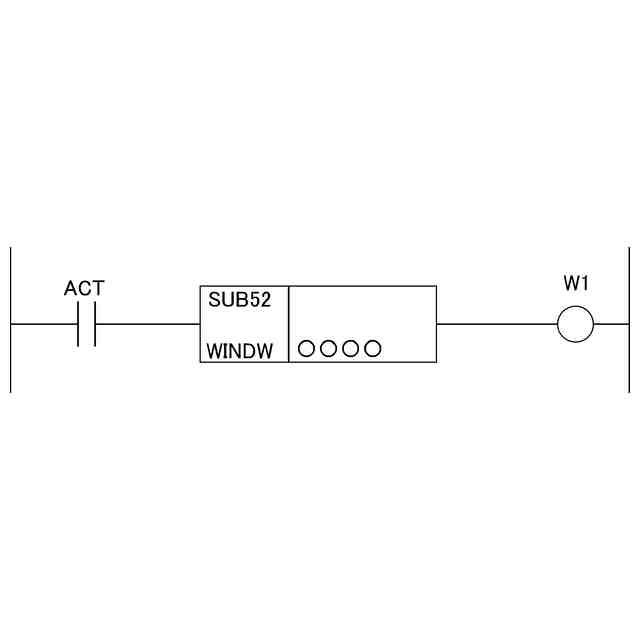
ラダープログラムの命令の一例を示す図である。
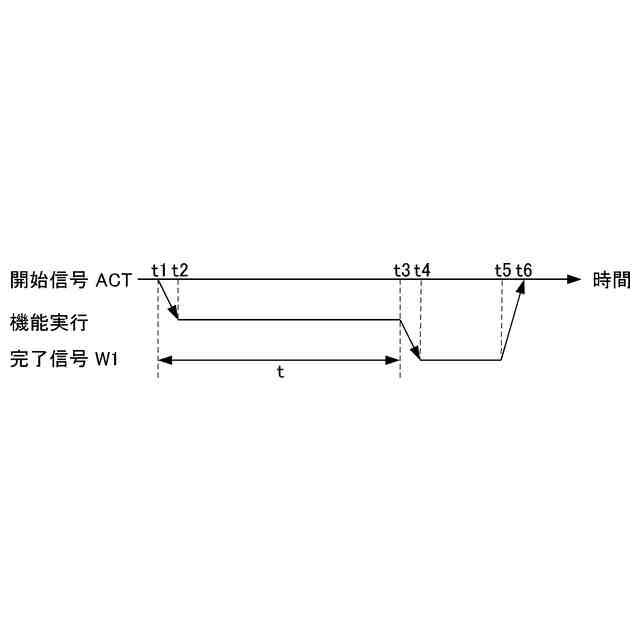
図3Aの命令のタイミングチャートの一例を示す図である。
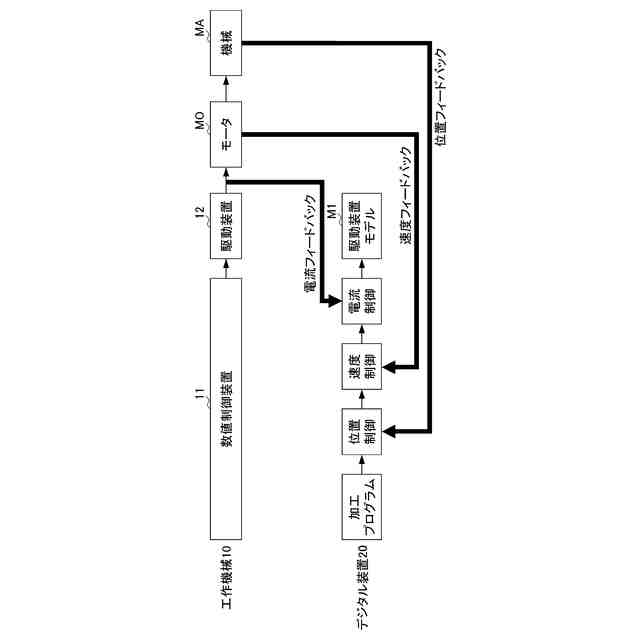
実際の帰還量を用いて工作機械の動作を再現する場合の産業機械制御システムの動作例を示す図である。
実際の帰還量を用いて工作機械の動作を再現する場合の産業機械制御システムの動作例を示す図である。
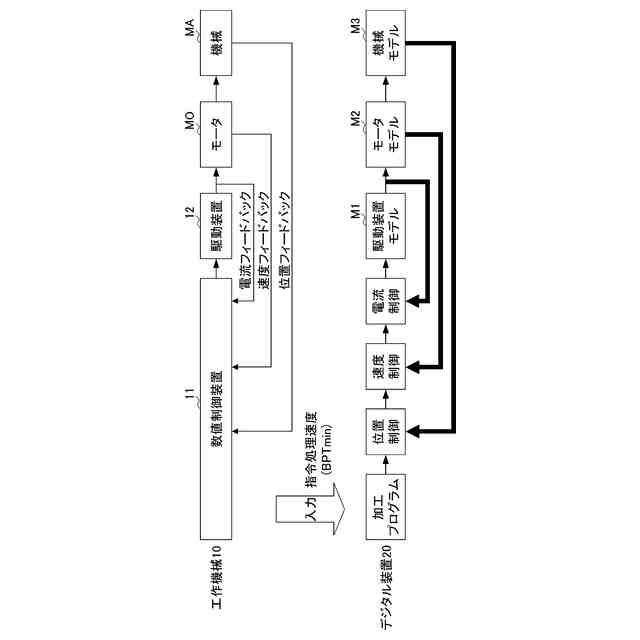
実際の数値制御装置のCPU性能に応じて加工プログラムを修正する場合の産業機械制御システムの動作例を示す図である。
BPTminを測定するテスト用の加工プログラムの一例を示す図である。
ブロック長-BPTの関係の一例を示す図である。
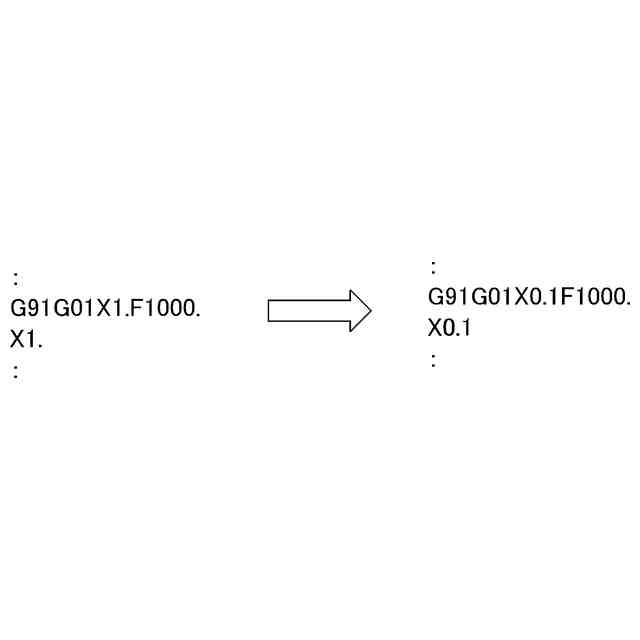
シミュレーション実行部による加工プログラムの指令点を追加又は削除の一例を示す図である。
実際の工作機械の消費電力に基づいて加工プログラムを修正する場合の産業機械制御システムの動作例を示す図である。
送り速度(又は主軸回転数)-消費電力の関係の一例を示す図である。
送り速度(又は主軸回転数)と総消費電力との関係の一例を示す図である。
工作機械のモータ温度を用いてオーバーヒートアラームの発生を再現する場合の産業機械制御システムの動作例を示す図である。
回転数(又は電流)毎に回転時間とモータ温度との関係の一例を示す図である。
【発明を実施するための形態】
【0009】
<一実施形態>
図1は、一実施形態に係る産業機械制御システムの機能的構成例を示す機能ブロック図である。ここでは、産業機械として工作機械を、また制御装置として数値制御装置を例示する。なお、本発明は、工作機械及び数値制御装置に限定されず、例えば射出成形機や産業用ロボット、サービス用ロボット等の産業機械、及び産業用ロボット等を制御するロボット制御装置に対しても適用可能である。
図1に示すように、産業機械制御システム1は、リアル装置としての工作機械10、及びデジタル装置20を含む。
工作機械10、及びデジタル装置20は、図示しない接続インタフェースを介して互いに直接接続されてもよい。なお、工作機械10、及びデジタル装置20は、LAN(Local Area Network)やインターネット等の図示しないネットワークを介して相互に接続されていてもよい。この場合、工作機械10、及びデジタル装置20は、かかる接続によって相互に通信を行うための図示しない通信部を備えている。
【0010】
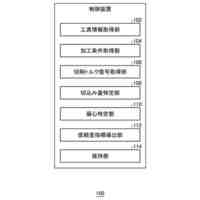
<工作機械10>
工作機械10は、当業者にとって公知の工作機械であり、制御装置としての数値制御装置11、駆動装置12、周辺装置13、及び情報収集装置14を含む。工作機械10は、後述する数値制御装置11の動作指令に基づいて動作する。
なお、数値制御装置11、駆動装置12、周辺装置13、及び情報収集装置14それぞれは、工作機械10に含まれるが、工作機械10とは異なる装置でもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
22日前
株式会社ダイヘン
移動体
27日前
ローム株式会社
半導体集積回路
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
22日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
株式会社鷺宮製作所
制御装置
21日前
株式会社オプトン
制御プログラム生成装置
20日前
キヤノン電子株式会社
加工装置、及び、制御方法
7日前
株式会社ダイヘン
負荷時タップ切換器
27日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
20日前
株式会社ダイフク
物品搬送設備
20日前
株式会社ダイフク
物品搬送設備
13日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
三菱電機株式会社
電源回路
7日前
オムロン株式会社
安全装置
20日前
シンフォニアテクノロジー株式会社
異常検知装置
20日前
株式会社計数技研
移動体、及びプログラム
1か月前
個人
ペダル装置、及びペダル装置を具備する自動車
2日前
ローム株式会社
半導体装置
1か月前
株式会社ダイフク
飛行体制御システム
9日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
21日前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
国立大学法人東海国立大学機構
ミリング加工監視方法
今日
株式会社豊田自動織機
無人搬送車両
1か月前
株式会社東芝
監視制御システム及び監視制御方法
8日前
株式会社大林組
作業機械の自動運転制御システム
1か月前
エイブリック株式会社
ボルテージレギュレータ及び半導体装置
1か月前
株式会社FUJI
工作機械
23日前
株式会社東海理化電機製作所
ペダル装置
1か月前
横河電機株式会社
電流出力装置
1か月前
株式会社東海理化電機製作所
ペダル装置
1か月前
オークラ輸送機株式会社
走行車および自律走行方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ