TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094555
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210175
出願日
2023-12-13
発明の名称
ネジ穴検査装置及びネジ締め装置
出願人
東海旅客鉄道株式会社
代理人
名古屋国際弁理士法人
主分類
B25J
13/08 20060101AFI20250618BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 ネジ穴の健全性を正確に検査することが可能なネジ穴検査装置の一例を少なくとも開示する。
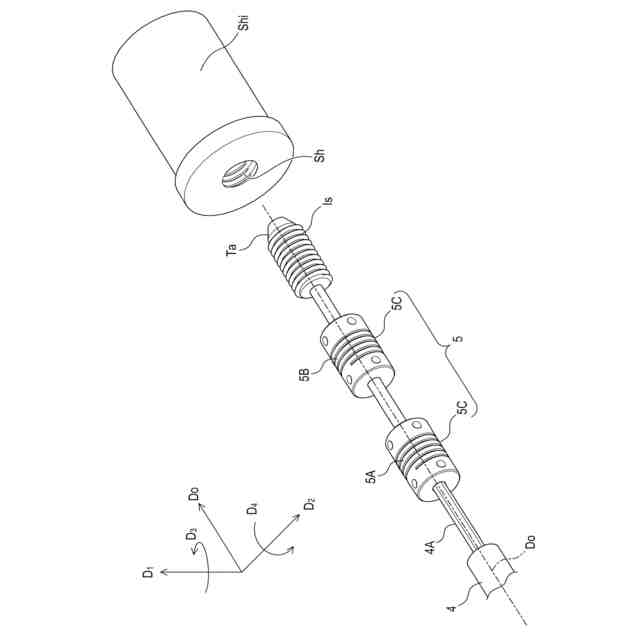
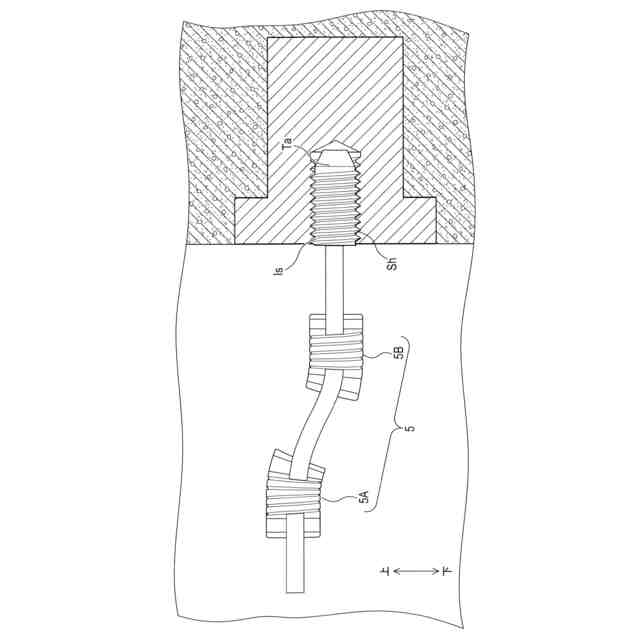
【解決手段】 フレキシブルジョイント5は、検査用ボルトIsの姿勢が第1方向D1、第2方向D2、第3方向D3及び第4方向D4のうちいずれかの方向に変化した場合であっても回転力を当該検査用ボルトIsに伝達可能な継ぎ手である。これにより、ネジ穴検査装置では、検査用ボルトIsの中心軸線とネジ穴Shの中心軸線がずれていた場合であっても、検査用ボルトIsをネジ穴Shに適切に挿入及び螺合させることが可能となるので、ネジ穴Shの健全性を正確に検査することができる。
【選択図】 図2
特許請求の範囲
【請求項1】
検査用ボルトをネジ穴に挿入することにより、当該ネジ穴が健全であるか否かを検査するネジ穴検査装置において、
前記検査用ボルトを前記ネジ穴に螺合させる回転力を発生させる電動モータと、
前記電動モータの出力軸から前記検査用ボルトに至る回転力伝達経路に設けられたフレキシブルジョイントとを備え、
前記出力軸の中心軸線と直交するとともに、互いに直交する2つの方向を第1方向及び第2方向とし、当該第1方向を中心線とする回転方向を第3方向とし、当該第2方向を中心線とする回転方向を第4方向としたとき、
前記フレキシブルジョイントは、前記検査用ボルトの姿勢が第1方向、第2方向、第3方向及び第4方向のうちいずれかの方向に変化した場合であっても回転力を当該検査用ボルトに伝達可能であるネジ穴検査装置。
続きを表示(約 1,100 文字)
【請求項2】
前記フレキシブルジョイントは、バネ部を有しており、
さらに、前記バネ部は、前記検査用ボルトの姿勢が第1方向、第2方向、第3方向及び第4方向のうちいずれかの方向に変化したときに、当該姿勢を変化前の姿勢に復元させる復元力を発揮可能である請求項1に記載のネジ穴検査装置。
【請求項3】
前記フレキシブルジョイントは、複数のジョイント部が前記回転力伝達経路に沿って直列に連結されて構成されており、
さらに、複数のジョイント部それぞれは、前記バネ部を有して構成されている請求項2に記載のネジ穴検査装置。
【請求項4】
前記検査用ボルトの先端側には、円錐状のテーパ部が設けられている請求項1ないし3のいずれか1項に記載のネジ穴検査装置。
【請求項5】
前記中心軸線の方向を挿入方向とし、当該中心軸線が水平方向であるとき、
少なくとも挿入方向、第1方向及び第2方向に前記電動モータを変位させることが可能なロボットと、
前記ロボットの作動を制御する制御部とを備え、
前記制御部は、前記検査用ボルトの中心線が前記ネジ穴の中心線に対して上方にずれた状態で当該検査用ボルトが前記ネジ穴に近接するように前記ロボットを作動させた後、当該検査用ボルトの中心線が前記ネジ穴の中心線に一致するように当該ロボットを作動させる請求項4に記載のネジ穴検査装置。
【請求項6】
前記検査用ボルトが前記ネジ穴に螺合する向きの回転を正転の向きとし、当該正転の向きと逆向きの回転を逆転の向きとしたとき、
前記電動モータの回転を制御する制御部は、前記した「前記検査用ボルトの中心線が前記ネジ穴の中心線に一致するように前記ロボットが作動する」ときには、当該電動モータの出力軸を逆転の向きに回転させる請求項5に記載のネジ穴検査装置。
【請求項7】
ボルトをネジ穴に挿入して螺合させるネジ締め装置において、
前記ボルトを前記ネジ穴に螺合させる回転力を発生させる電動モータと、
前記電動モータの出力軸から前記ボルトに至る回転力伝達経路に設けられたフレキシブルジョイントとを備え、
前記出力軸の中心軸線と直交するとともに、互いに直交する2つの方向を第1方向及び第2方向とし、当該第1方向を中心線とする回転方向を第3方向とし、当該第2方向を中心線とする回転方向を第4方向としたとき、
前記フレキシブルジョイントは、前記ボルトの姿勢が第1方向、第2方向、第3方向及び第4方向のうちいずれかの方向に変化した場合であっても回転力を当該ボルトに伝達可能であるネジ締め装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ネジ穴検査装置及びネジ締め装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えば、特許文献1に係るネジ穴検査装置では、検査用ボルトの軸トルクの変化を利用してネジ穴の健全性を検査する。
【先行技術文献】
【特許文献】
【0003】
特開2016-173788号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、検査用ボルトの中心軸線とネジ穴の中心軸線がずれていると、検査用ボルトをネジ穴に適切に挿入及び螺合させることができないため、ネジ穴の健全性を正確に検査することができない。本開示は、当該点に鑑みたネジ穴検査装置の一例を開示する。
【課題を解決するための手段】
【0005】
検査用ボルト(Is)をネジ穴(Sh)に挿入することにより、当該ネジ穴(Sh)が健全であるか否かを検査するネジ穴検査装置は、例えば、以下の構成要件を備えることが望ましい。
【0006】
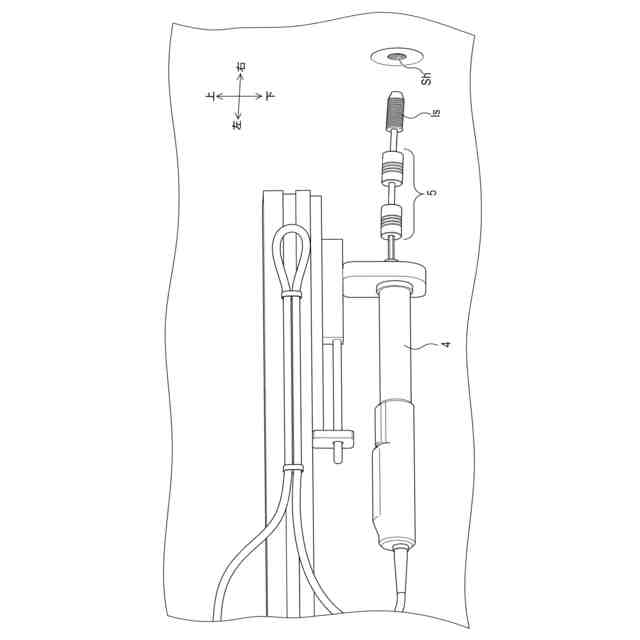
すなわち、当該構成要件は、検査用ボルト(Is)をネジ穴(Sh)に螺合させる回転力を発生させる電動モータ(4)と、電動モータ(4)の出力軸から検査用ボルト(Is)に至る回転力伝達経路(4A)に設けられたフレキシブルジョイント(5)とを備え、出力軸の中心軸線(Do)と直交するとともに、互いに直交する2つの方向を第1方向(D1)及び第2方向(D2)とし、当該第1方向(D1)を中心線とする回転方向を第3方向とし、当該第2方向(D2)を中心線とする回転方向を第4方向としたとき、フレキシブルジョイント(5)は、検査用ボルト(Is)の姿勢が第1方向(D1)、第2方向(D2)、第3方向(D3)及び第4方向(D4)のうちいずれかの方向に変化した場合であっても回転力を当該検査用ボルト(Is)に伝達可能であることである。
【0007】
これにより、当該ネジ穴検査装置では、検査用ボルト(Is)の中心軸線とネジ穴(Sh)の中心軸線がずれていた場合であっても、検査用ボルト(Is)をネジ穴(Sh)に適切に挿入及び螺合させることが可能となるので、ネジ穴の健全性を正確に検査することができる。
【0008】
因みに、上記各括弧内の符号は、後述する実施形態に記載の具体的構成等との対応関係を示す一例であり、本開示は上記括弧内の符号に示された具体的構成等に限定されない。
【図面の簡単な説明】
【0009】
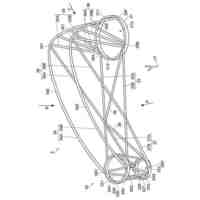
第1実施形態に係るネジ穴検査装置の外観図である。
第1実施形態に係るフレキシブルジョイントを示す図である。
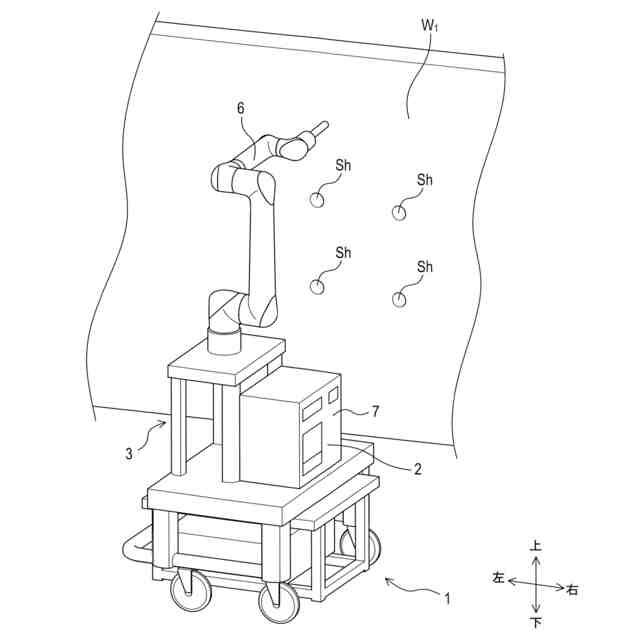
第1実施形態に係るネジ穴検査装置の作動時を示す図である。
第1実施形態に係るネジ穴検査装置を示す図である。
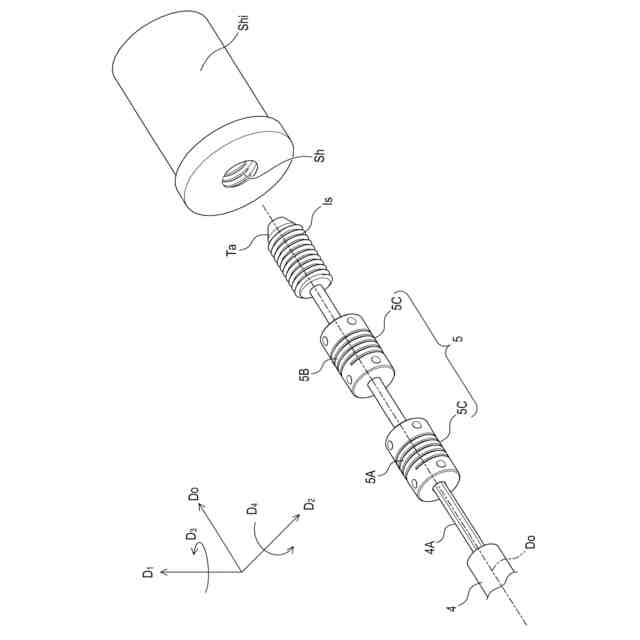
第1実施形態に係るフレキシブルジョイントを示す図である。
【発明を実施するための形態】
【0010】
以下の「発明の実施形態」は、本開示の技術的範囲に属する実施形態の一例を示すものである。つまり、特許請求の範囲に記載された発明特定事項等は、下記の実施形態に示された具体的構成や構造等に限定されない。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
7日前
日東精工株式会社
電動ドライバ
1か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
今日
株式会社ダイヘン
搬送装置
今日
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
支援装置
今日
株式会社PILLAR
チューブ保持治具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
住友重機械工業株式会社
支援装置
今日
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
今日
株式会社スター精機
産業用ロボット
28日前
オークラ輸送機株式会社
ハンド装置
15日前
アピュアン株式会社
衝撃工具
2日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
16日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
今日
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ジャノメ
ロボット
24日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ