TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025092830
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208190
出願日
2023-12-11
発明の名称
ロボットのパス生成システム、パス生成方法、ロボット制御装置、プログラム及びデータ構造
出願人
公立大学法人北九州市立大学
代理人
個人
主分類
B25J
9/22 20060101AFI20250616BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】タスクの変更に応じて容易にパスを生成できるロボットのパス生成システム、パス生成方法、ロボット制御装置、プログラム及びデータ構造を提供する。
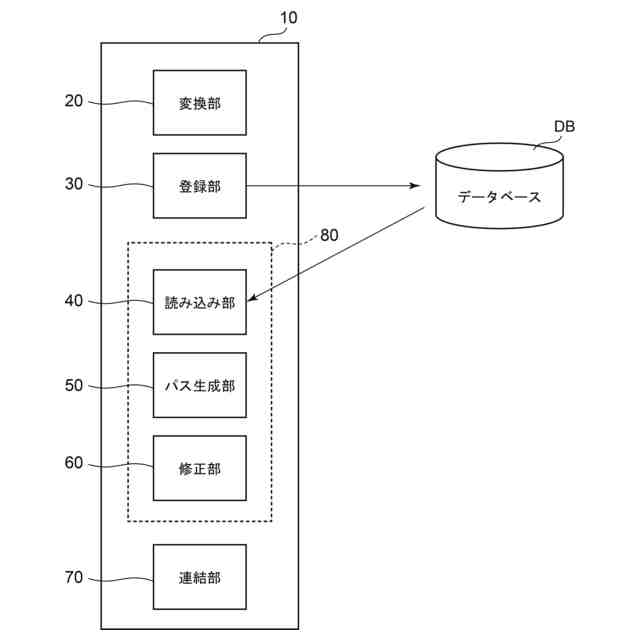
【解決手段】パス生成システム10は、第1のスタートから第1のゴールへ至る多関節ロボットのパスを、多関節ロボットの物理パラメータに依存しない形式のテンプレートパスデータに変換する変換部20と、第2のスタートから第2のゴールへ至るパスを、テンプレートパスデータに基づいて生成するパス生成部50と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1のスタートから第1のゴールへ至る多関節ロボットのパスを、該多関節ロボットの物理パラメータに依存しない形式のテンプレートパスデータに変換する変換部と、
第2のスタートから第2のゴールへ至るパスを、前記テンプレートパスデータに基づいて生成するパス生成部と、を備えたロボットのパス生成システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1記載のロボットのパス生成システムにおいて、
前記テンプレートパスデータが、前記第1のスタートから前記第1のゴールまでを結ぶ線分と前記変換部が変換する前のパスとの間の偏差の情報を含むロボットのパス生成システム。
【請求項3】
請求項2記載のロボットのパス生成システムにおいて、
前記偏差の情報が、1)前記線分とウェイポイントから延びる垂線との交点の位置の該線分に対する比率、2)前記ウェイポイントから対応する前記交点までの偏差ノルム及び3)前記交点から対応する前記ウェイポイントへ向かう方向を有する第1のベクトルと前記線分が延びる方向を有する正規化された第2のベクトルとにそれぞれ直交する直交ベクトルを含むロボットのパス生成システム。
【請求項4】
請求項2記載のロボットのパス生成システムにおいて、
前記偏差の情報が、1)ウェイポイントに対応する前記線分上の位置、2)前記線分上の位置から対応する前記ウェイポイントまでの偏差ノルム及び3)前記線分上の位置に対して前記ウェイポイントが位置する方向を特定するためのベクトルを含むロボットのパス生成システム。
【請求項5】
請求項2記載のロボットのパス生成システムにおいて、
前記偏差の情報が、1)ウェイポイントに対応する前記線分上の位置を決定するための位置決定情報、2)前記線分上の位置から対応する前記ウェイポイントまでの偏差ノルム及び3)前記線分上の位置に対して前記ウェイポイントが位置する方向を特定するためのベクトルを含むロボットのパス生成システム。
【請求項6】
請求項3~5のいずれか1項に記載のロボットのパス生成システムにおいて、
前記多関節ロボットの関節数が3又は7以外の場合に、
前記偏差ノルムが、異なる複数の関節ごとに分けて求められるロボットのパス生成システム。
【請求項7】
請求項6記載のロボットのパス生成システムにおいて、
前記パス生成部によって生成されたパスを、多関節ロボットが動作する周囲の環境に基づいて修正する修正部を更に備えたロボットのパス生成システム。
【請求項8】
請求項7記載のロボットのパス生成システムにおいて、
前記テンプレートパスデータをデータベースに登録する登録部を更に備えたロボットのパス生成システム。
【請求項9】
請求項8記載のロボットのパス生成システムにおいて、
異なる前記テンプレートパスデータを繋ぎ合わせ、新たなテンプレートパスデータを生成する連結部を更に備えたロボットのパス生成システム。
【請求項10】
多関節ロボットを制御するためのロボット制御装置を、
第1のスタートから第1のゴールへ至る多関節ロボットのパスが該多関節ロボットの物理パラメーラに依存しない形式に変換されたテンプレートパスデータを読み込む読み込み手段、
第2のスタートから第2のゴールへ至るパスを、前記テンプレートパスデータに基づいて生成するパス生成手段、として機能させるためのプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットのパス生成システム、パス生成方法、ロボット制御装置、プログラム及びデータ構造に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、ロボットと作業環境の幾何学的形状およびそれらの配置を記述した計算機上の幾何モデル手段と、モデル同士の干渉を検査する計算機上の干渉検査手段と、を利用し、ロボットのスタートおよびゴール配置が与えられたときロボットと作業環境内の障害物とが干渉を起こさずにスタート配置からゴール配置へ至るロボットの動作経路を計画する動作経路計画方法が記載されている。
【0003】
この動作経路計画方法は、スタート配置を始端サブゴール、ゴール配置を終端サブゴールとし、ロボットの始端サブゴールと終端サブゴールを結ぶ作業空間あるいは配置空間における直線経路を2分割する点を最初のサブゴール候補とし、隣接するサブゴールをサブゴールa、bと表し、該サブゴールa、b間を結ぶ作業空間あるいは配置空間における直線経路を2分割する点をサブゴール候補1と表して新たなサブゴールの候補とし、サブゴール候補1においてロボットと障害物との干渉を幾何モデル手段と干渉検査手段とを用いて検査し、(i)サブゴール候補1において干渉が検出されなかったときは、サブゴール候補1を新たなサブゴールcとして、a→c→bで表されるサブゴールの接続関係を記述する有向グラフを生成し、(ii)サブゴール候補1において干渉が検出されたときは、サブゴール候補1から、予め定めた複数のロボット回避動作方向それぞれに適当な距離間隔でロボットを移動させた複数の点において干渉検査を行い、それぞれの回避動作方向あるいはその内の幾つかに対して、干渉が検出されない点の中から新たなサブゴールd1、d2、d3、・・・を1つずつ選び、a→d1→b、a→d2→b、a→d3→b、・・・で表されるサブゴールの有向グラフを生成する手続を、各サブゴール間の距離が予め定めた値以下になるまで、再帰的に繰り返し、サブゴールの有向グラフを用いて始端サブゴールから終端サブゴールへ至るサブゴール経路、すなわちサブゴール系列を複数組計画することを特徴としている。
【先行技術文献】
【特許文献】
【0004】
特開2000-20117号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本開示は、タスクの変更に応じて容易にパスを生成できるロボットのパス生成システム及びパス生成方法並びにロボット制御装置及びプログラムを説明する。
【課題を解決するための手段】
【0006】
本開示の一つの観点に係るロボットのパス生成システムは、第1のスタートから第1のゴールへ至る多関節ロボットのパスを、該多関節ロボットの物理パラメータに依存しない形式のテンプレートパスデータに変換する変換部と、第2のスタートから第2のゴールへ至るパスを、前記テンプレートパスデータに基づいて生成するパス生成部と、を備える。
【0007】
本開示の他の観点に係るプログラムは、多関節ロボットを制御するためのロボット制御装置を、第1のスタートから第1のゴールへ至る多関節ロボットのパスが該多関節ロボットの物理パラメーラに依存しない形式に変換されたテンプレートパスデータを読み込む読み込み手段、第2のスタートから第2のゴールへ至るパスを、前記テンプレートパスデータに基づいて生成するパス生成手段、として機能させる。
【0008】
本開示の他の観点に係るロボット制御装置は、第1のスタートから第1のゴールへ至る多関節ロボットのパスが該多関節ロボットの物理パラメータに依存しない形式に変換されたテンプレートパスデータを読み込む読み込み部と、第2のスタートから第2のゴールへ至るパスを、前記テンプレートパスデータに基づいて生成するパス生成部と、を備える。
【0009】
本開示の他の観点に係るパスの生成方法は、上記ロボットのパス生成システムを用いたパスの生成方法であって、前記変換部が、タスクに関連付けられた複数のパスをそれぞれテンプレートパスデータに変換するステップと、変換された前記テンプレートパスデータが、それぞれデータベースに登録されるステップと、前記データベースの中から、タスクに応じて前記テンプレートパスデータが選択されるステップと、前記パス生成部が、選択された前記テンプレートパスデータに基づいて、パスを生成するステップと、を含む。
【0010】
本開示の他の観点に係るテンプレートパスデータのデータ構造は、上記ロボットのパス生成システムによって使用されるテンプレートパスデータのデータ構造であって、前記線分とウェイポイントに対応する前記線分上の位置又は該位置を決定するための位置決定情報、前記線分上の位置から対応する前記ウェイポイントまでの偏差ノルム、前記線分上の位置に対して前記ウェイポイントが位置する方向を特定するためのベクトル、を含む。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
9日前
日東精工株式会社
電動ドライバ
1か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
2日前
株式会社ダイヘン
搬送装置
2日前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
工機ホールディングス株式会社
作業機
24日前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
支援装置
2日前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
住友重機械工業株式会社
支援装置
2日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
2日前
株式会社スター精機
産業用ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
17日前
アピュアン株式会社
衝撃工具
4日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
18日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
2日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ジャノメ
ロボット
26日前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
12日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ