TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091512
公報種別
公開特許公報(A)
公開日
2025-06-19
出願番号
2023206744
出願日
2023-12-07
発明の名称
建設機械の制御システム、制御方法及び制御プログラム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
G05D
1/69 20240101AFI20250612BHJP(制御;調整)
要約
【課題】無人機及び有人機が混在する工事現場において生産性及び安全性の両立を図る。
【解決手段】コンピュータが、建設機械20の制御システム1は、建設機械20に接近中の他の建設機械20を検知した場合、他の建設機械の操作状況に応じて、他車両の接近の判定に用いる接近検知センサを選択し、操作状況に応じて、接近時の対応処理を変更する。接近時の対応処理では、操作状況に応じて、建設機械20を停止又は減速させるための閾値を変更する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータが、
建設機械に接近中の他の建設機械を検知した場合、前記他の建設機械の操作状況を判定し、
前記操作状況に応じて、接近時の対応処理を変更することを特徴とする建設機械の制御システム。
続きを表示(約 330 文字)
【請求項2】
前記コンピュータが、前記操作状況に応じて、前記建設機械を停止又は減速するための閾値を変更する、請求項1に記載の建設機械の制御システム。
【請求項3】
コンピュータが、
建設機械に接近中の他の建設機械を検知した場合、前記他の建設機械の操作状況を判定し、
前記操作状況に応じて、接近時の対応処理を変更することを特徴とする建設機械の制御方法。
【請求項4】
コンピュータを、
建設機械に接近中の他の建設機械を検知した場合、前記他の建設機械の操作状況を判定し、
前記操作状況に応じて、接近時の対応処理を変更する手段として機能させることを特徴とする建設機械の制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、建設機械を制御する制御システム、制御方法及び制御プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
建設機械を運転するオペレータの不足が問題となっている。この問題に対して、無人で走行及び施工作業を行う無人建設機械の開発が行われている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-015628号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
無人建設機械(以下、無人機という)を用いる工事現場においては、無人機のみが施工作業を行う場面、無人機及び有人建設機械(以下、有人機という)の両方が施工作業を行う場面が想定される。特に無人機及び有人機の両方が施工作業を行う工事現場においては、無人機の導入による生産性を高めつつ、有人機の安全確保に配慮する必要があるが、これらを考慮したシステムは確立されていない。
【課題を解決するための手段】
【0005】
上記課題を解決する建設機械の制御システムは、コンピュータが、建設機械に接近中の他の建設機械を検知した場合、前記他の建設機械の操作状況を判定し、前記操作状況に応じて、接近時の対応処理を変更する。
【発明の効果】
【0006】
本発明によれば、無人機及び有人機が混在する工事現場において生産性及び安全性の両立を図ることができる。
【図面の簡単な説明】
【0007】
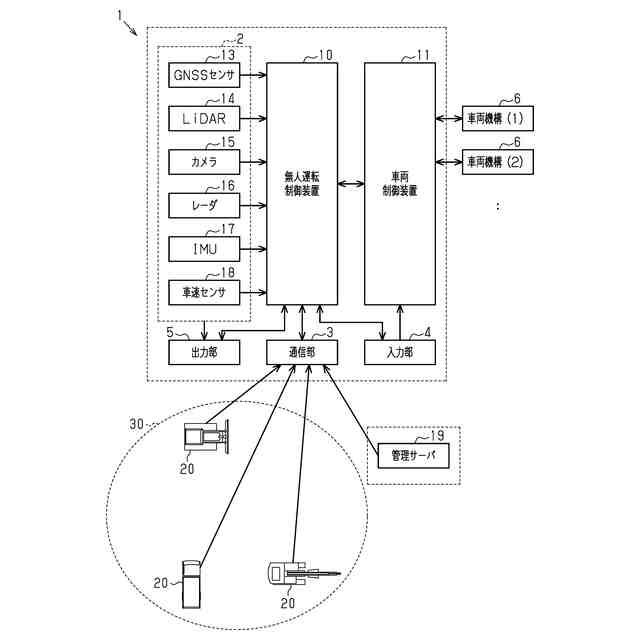
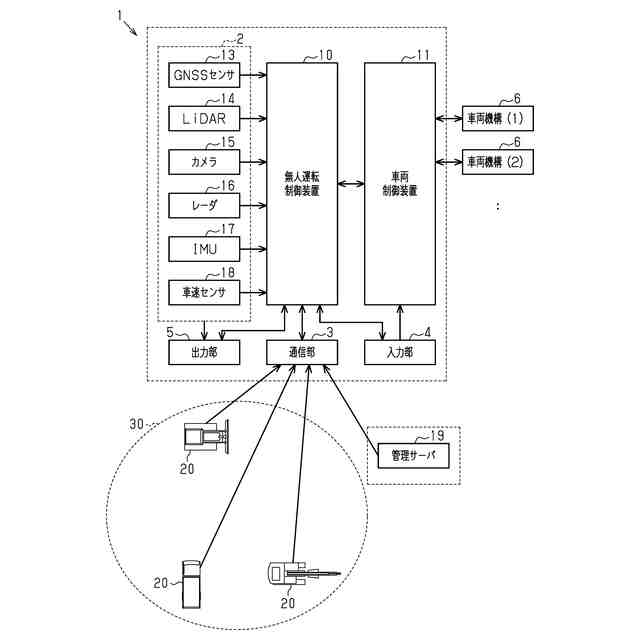
第1実施形態における制御システムの概略図である。
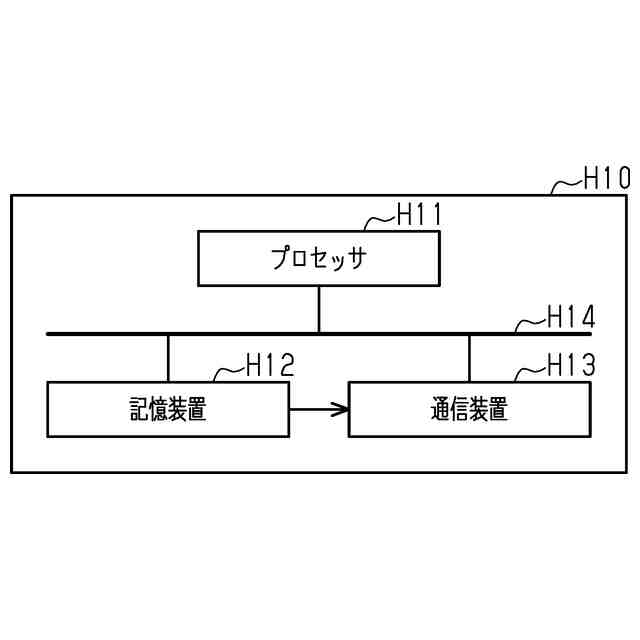
同実施形態の情報処理装置の概略図である。
同実施形態の車両情報のデータ構成を示す図である。
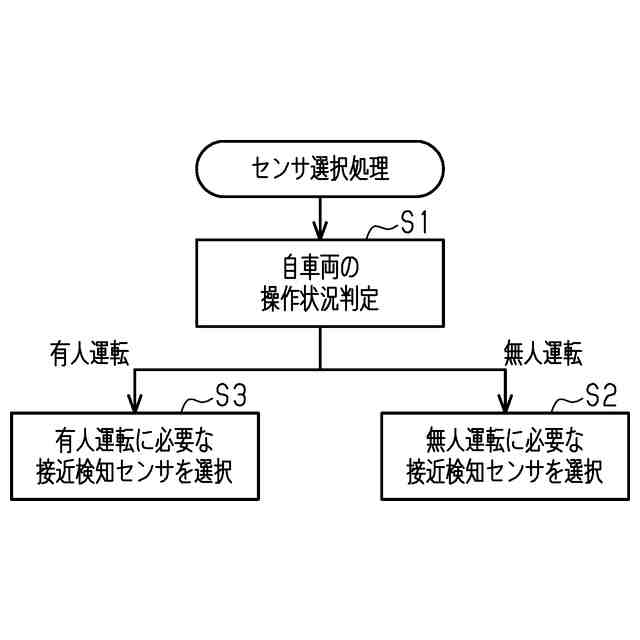
同実施形態のセンサ選択処理のフローチャートである。
同実施形態の接近時対応処理のフローチャートである。
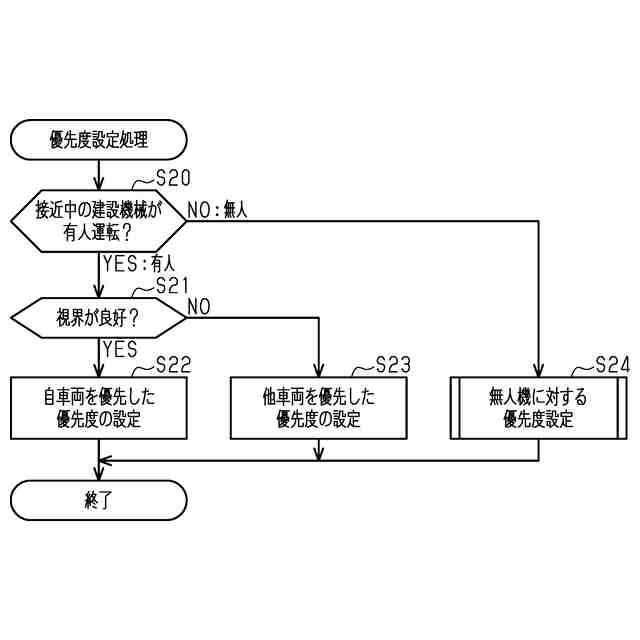
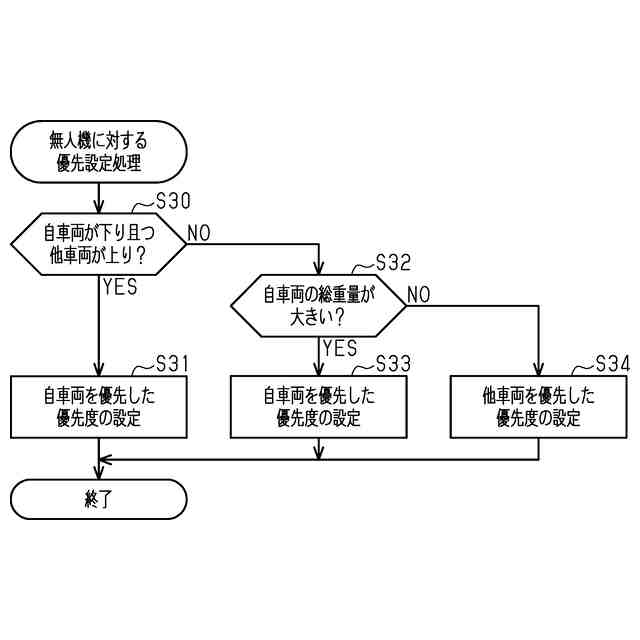
同実施形態の優先度設定処理のフローチャートである。
同実施形態の優先度設定処理のフローチャートである。
第2実施形態の制御システムが記憶するオペレータ情報である。
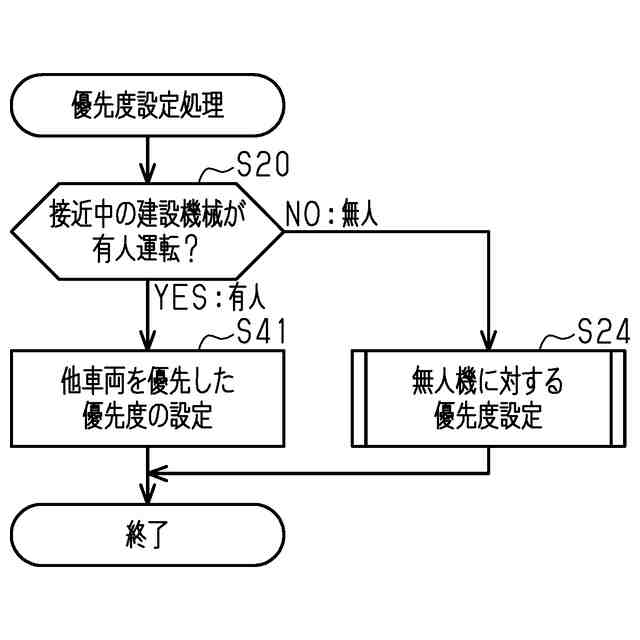
同実施形態の優先設定処理のフローチャートである。
【発明を実施するための形態】
【0008】
<第1実施形態>
以下、図1~図7に従って、建設機械の制御システム、制御方法及び制御プログラムの第1実施形態について説明する。
【0009】
<制御システムの概要>
制御システムは、工事現場で作業を行う無人機を制御する。無人機は、工事現場において自律運転を行う建設機械である。無人機は、オペレータが乗車しない建設機械であって、工事現場における移動、停止、及び施工作業等を自動的に行う。無人機は、遠隔地の管理者によって監視されていてもよい。
【0010】
有人機は、オペレータが乗車し、且つオペレータが、移動、停止、及び施工作業等の運転操作を行う。本実施形態において、工事現場には、無人機及び有人機の両方が存在する。このような工事現場において、無人機は、周辺の他車両が無人機及び有人機のいずれであるかを問わずその他車両との間に適切な相対距離(車間距離)を保ちながら施工作業を行うことが可能である。一方、有人機は、オペレータが他車両を肉眼で確認するとともに、確認した他車両との相対距離を調整しながら施工作業を行う。有人機と他車両との相対距離はその有人機を運転するオペレータに応じて変動する。このため、無人機は、他の無人機に接近した場合と、有人機に接近した場合とで、衝突回避のための制御を異ならせることが望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ