TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025091185
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206290
出願日
2023-12-06
発明の名称
自動運転装置及び自動運転方法
出願人
いすゞ自動車株式会社
代理人
弁理士法人創光国際特許事務所
主分類
B60W
30/095 20120101AFI20250611BHJP(車両一般)
要約
【課題】障害物の位置に適した経路を移動体に走行させる。
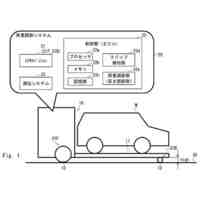
【解決手段】自動運転装置30は、点群データから抽出した障害物の位置に基づいて、移動体の走行を推奨する度合いを数値化した第1ポテンシャルを障害物の周囲の位置毎に決定する第1決定部321を有し、第1決定部321は、移動体の進行方向と、進行方向の反対方向と、における第1ポテンシャルの第1変化量と、進行方向に対して右方向と左方向とにおける第1ポテンシャルの第2変化量と、の比率を決定するための第1係数、障害物から進行方向における第1変化量と、障害物から進行方向の反対方向における第1変化量と、の比率を決定するための第2係数、及び第1ポテンシャルの大きさを決定するための第3係数を含むポテンシャル関数に、障害物の周囲の位置を入力することにより、ポテンシャル関数が出力した出力値を第1ポテンシャルに決定する。
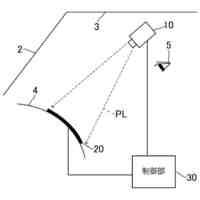
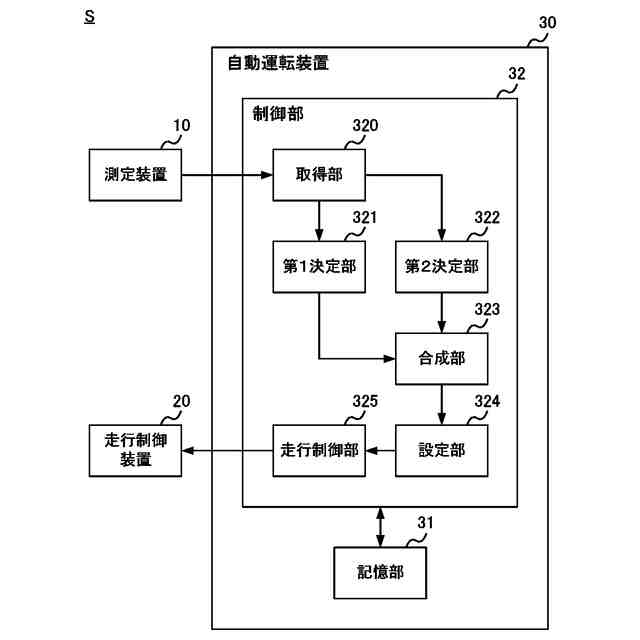
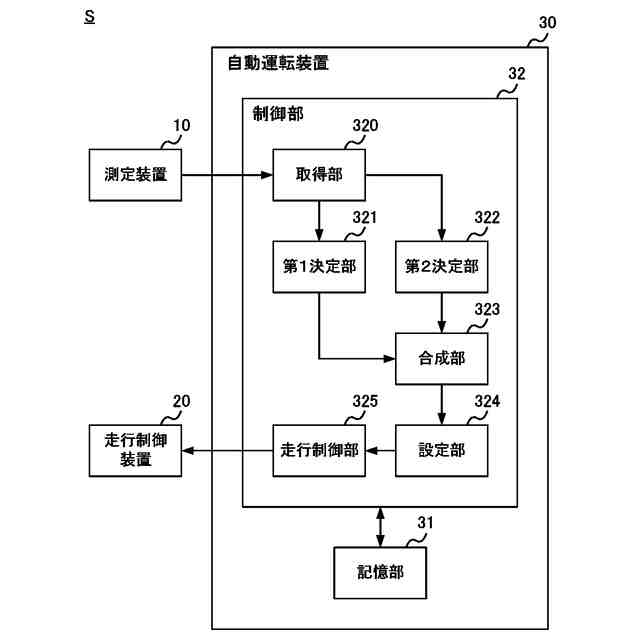
【選択図】図4
特許請求の範囲
【請求項1】
移動体の周囲の領域を測定して生成した点群データを取得する取得部と、
前記点群データから抽出した障害物の位置に基づいて、前記移動体の走行を推奨する度合いを数値化した第1ポテンシャルを前記障害物の周囲の位置毎に決定する第1決定部と、を有し、
前記第1決定部は、
前記移動体の進行方向と、前記進行方向の反対方向と、における前記第1ポテンシャルの第1変化量と、前記進行方向に対して右方向と左方向とにおける前記第1ポテンシャルの第2変化量と、の比率を決定するための第1係数、前記障害物から前記進行方向における前記第1変化量と、前記障害物から前記進行方向の反対方向における前記第1変化量と、の比率を決定するための第2係数、及び前記第1ポテンシャルの大きさを決定するための第3係数を含むポテンシャル関数に、
前記障害物の周囲の位置を入力することにより、前記ポテンシャル関数が出力した出力値を前記第1ポテンシャルに決定する、
自動運転装置。
続きを表示(約 1,400 文字)
【請求項2】
走行路の位置を含む地図情報を参照することにより、前記移動体の走行を推奨する度合いを数値化した第2ポテンシャルを前記障害物の周囲の位置毎に決定する第2決定部と、
前記障害物の周囲の位置毎に前記第1ポテンシャルと前記第2ポテンシャルとを合成した合成ポテンシャルを生成する合成部と、
前記合成ポテンシャルに基づいて、前記移動体が走行する経路を設定する設定部と、をさらに有する、
請求項1に記載の自動運転装置。
【請求項3】
前記第1決定部は、前記第1変化量及び前記第2変化量と、前記第1ポテンシャルに対する前記第2ポテンシャルの大きさと、を決定するための、第4係数及び第5係数をさらに含む前記ポテンシャル関数の出力値を前記第1ポテンシャルに決定する、
請求項2に記載の自動運転装置。
【請求項4】
前記第1決定部は、前記障害物の位置を示す複数の第1座標のうち一の前記第1座標を原点とした、前記第1座標から所定の距離内の複数の第2座標のうち一の前記第2座標に対応する座標と、前記原点と前記一の前記第2座標に対応する座標とを通る直線及び前記移動体の進行方向を示す直線のなす角度と、を前記障害物の周囲の位置として前記ポテンシャル関数に入力する、
請求項1から3のいずれか一項に記載の自動運転装置。
【請求項5】
前記第1決定部は、
前記第1座標毎に、前記第1座標に対応する前記第2座標毎の前記出力値を算出し、
前記出力値を算出する前に当該出力値に対応する前記第2座標の前記第1ポテンシャルが決定していない場合は、当該出力値を第1ポテンシャルに決定し、
前記出力値を算出する前に当該出力値に対応する前記第2座標の前記第1ポテンシャルが決定している場合は、当該第1ポテンシャルに当該出力値を加算する、
請求項4に記載の自動運転装置。
【請求項6】
前記取得部は、前記移動体の周囲の領域を測定して生成した点群データに含まれる複数の点群のうち、前記障害物の位置と異なる位置で反射することにより生成された点群を除外した点群データを取得する、
請求項1から3のいずれか一項に記載の自動運転装置。
【請求項7】
移動体の周囲の領域を測定して生成した点群データを取得する取得工程と、
前記点群データから抽出した障害物の位置に基づいて、前記移動体の走行を推奨する度合いを数値化した第1ポテンシャルを前記障害物の周囲の位置毎に決定する決定工程と、を有し、
前記決定工程において、前記移動体の進行方向と、前記進行方向の反対方向と、における前記第1ポテンシャルの第1変化量と、前記進行方向に対して右方向と左方向とにおける前記第1ポテンシャルの第2変化量と、の比率を決定するための第1係数、前記障害物から前記進行方向における前記第1変化量と、前記障害物から前記進行方向の反対方向における前記第1変化量と、の比率を決定するための第2係数、及び前記第1ポテンシャルの大きさを決定するための第3係数を含むポテンシャル関数に、前記障害物の周囲の位置を入力することにより、前記ポテンシャル関数が出力した出力値を前記第1ポテンシャルに決定する、
自動運転方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転装置及び自動運転方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載の運転支援装置は、移動体である車両の周囲の物体の位置及び道路の形状に基づいて、車両の走行を推奨できる度合いを数値化したポテンシャル値を車両の周囲の各位置に設定し、当該ポテンシャル値に基づいて車両の走行経路を設定する。
【先行技術文献】
【特許文献】
【0003】
特開2018-192954号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
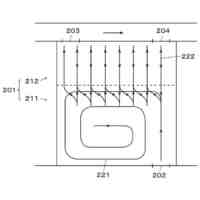
従来の運転支援装置は、移動体の周囲に存在する障害物の位置に最も大きい(移動体の走行を最も推奨しない)ポテンシャル値を設定し、障害物の位置との距離が大きい位置ほど小さいポテンシャル値を設定する。すなわち、従来の運転支援装置においては、障害物の位置を中心として同じポテンシャル値が同心円状に広がり、且つ障害物の位置との距離が大きい位置ほどポテンシャル値が小さくなる。
【0005】
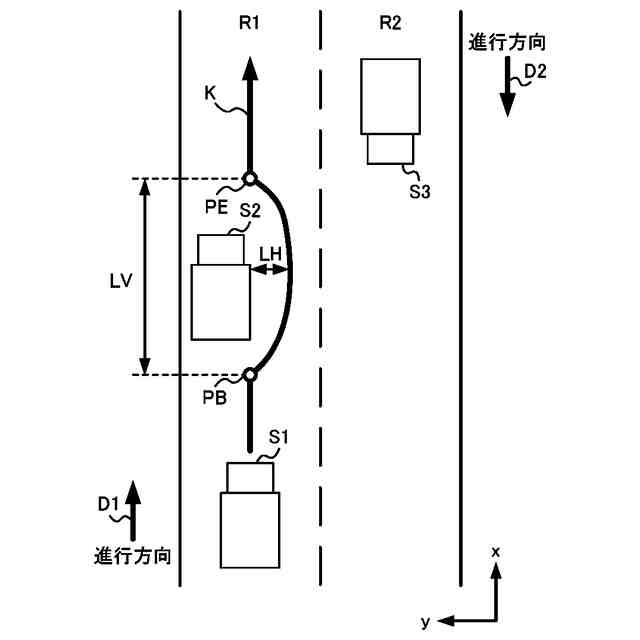
したがって、移動体が進行方向前方の障害物と接触しないように設定した走行経路は障害物を中心とした半円状になるため、走行経路が示す、走行路の幅方向及び進行方向それぞれにおける移動体と障害物との距離は、一方が大きくなると他方も大きくなる。その結果、移動体が障害物に接触しないように走行したとしても、障害物を回避する走行から通常の走行に戻る時間が不必要に大きくなったり、移動体の進行方向と反対の方向に走行する他の移動体と接触する危険性があったりするという問題があった。
【0006】
そこで、本発明はこれらの点に鑑みてなされたものであり、障害物の位置に適した経路を移動体に走行させることを目的とする。
【課題を解決するための手段】
【0007】
本発明の第1の態様に係る自動運転装置は、移動体の周囲の領域を測定して生成した点群データを取得する取得部と、前記点群データから抽出した障害物の位置に基づいて、前記移動体の走行を推奨する度合いを数値化した第1ポテンシャルを前記障害物の周囲の位置毎に決定する第1決定部と、を有し、前記第1決定部は、前記移動体の進行方向と、前記進行方向の反対方向と、における前記第1ポテンシャルの第1変化量と、前記進行方向に対して右方向と左方向とにおける前記第1ポテンシャルの第2変化量と、の比率を決定するための第1係数、前記障害物から前記進行方向における前記第1変化量と、前記障害物から前記進行方向の反対方向における前記第1変化量と、の比率を決定するための第2係数、及び前記第1ポテンシャルの大きさを決定するための第3係数を含むポテンシャル関数に、前記障害物の周囲の位置を入力することにより、前記ポテンシャル関数が出力した出力値を前記第1ポテンシャルに決定する。
【0008】
走行路の位置を含む地図情報を参照することにより、前記移動体の走行を推奨する度合いを数値化した第2ポテンシャルを前記障害物の周囲の位置毎に決定する第2決定部と、前記障害物の周囲の位置毎に前記第1ポテンシャルと前記第2ポテンシャルとを合成した合成ポテンシャルを生成する合成部と、前記合成ポテンシャルに基づいて、前記移動体が走行する経路を設定する設定部と、をさらに有してもよい。
【0009】
前記第1決定部は、前記第1変化量及び前記第2変化量と、前記第1ポテンシャルに対する前記第2ポテンシャルの大きさと、を決定するための、第4係数及び第5係数をさらに含む前記ポテンシャル関数の出力値を前記第1ポテンシャルに決定してもよい。
【0010】
前記第1決定部は、前記障害物の位置を示す複数の第1座標のうち一の前記第1座標を原点とした、前記第1座標から所定の距離内の複数の第2座標のうち一の前記第2座標に対応する座標と、前記原点と前記一の前記第2座標に対応する座標とを通る直線及び前記移動体の進行方向を示す直線のなす角度と、を前記障害物の周囲の位置として前記ポテンシャル関数に入力してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
カーテント
23日前
個人
車輪清掃装置
27日前
井関農機株式会社
作業車両
15日前
個人
キャンピングトライク
10日前
井関農機株式会社
作業車両
17日前
個人
キャンピングトレーラー
10日前
個人
車両用スリップ防止装置
1日前
日本精機株式会社
車両用表示装置
1日前
井関農機株式会社
作業車両
7日前
日本精機株式会社
車両用投影装置
17日前
井関農機株式会社
作業車両
7日前
日本精機株式会社
車両用投影装置
17日前
トヨタ自動車株式会社
車両
14日前
株式会社東洋シート
車両用シート構造
2日前
AGC株式会社
車両用窓ガラス
3日前
ダイハツ工業株式会社
車両構造
3日前
ダイハツ工業株式会社
積載装置
7日前
豊田合成株式会社
乗員保護装置
9日前
トヨタ自動車株式会社
運搬車両
8日前
テスコム株式会社
管運搬車
1日前
株式会社クボタ
作業車
2日前
サンショウ株式会社
支持装置
9日前
株式会社クボタ
作業車
2日前
小野谷機工株式会社
タイヤ搬送装置
23日前
スズキ株式会社
排気部材の支持構造
10日前
トヨタ自動車株式会社
電動車両
27日前
トヨタ自動車株式会社
車両の制御装置
3日前
マツダ株式会社
車両の制御装置
3日前
日産自動車株式会社
ルーフ構造
8日前
スズキ株式会社
車両用ドア構造
20日前
コベルコ建機株式会社
作業機械
27日前
林テレンプ株式会社
収納構造体
16日前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
ハイブリッド車両
8日前
日本プラスト株式会社
エアバッグ
7日前
株式会社クボタ
多目的車両
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ