TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090544
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2024209919
出願日
2024-12-03
発明の名称
カメラ及びプリントヘッドを備える多軸ロボットを較正する方法と、そのような方法を実装するように構成されたロボット
出願人
エクセル インダストリー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B05D
3/00 20060101AFI20250610BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
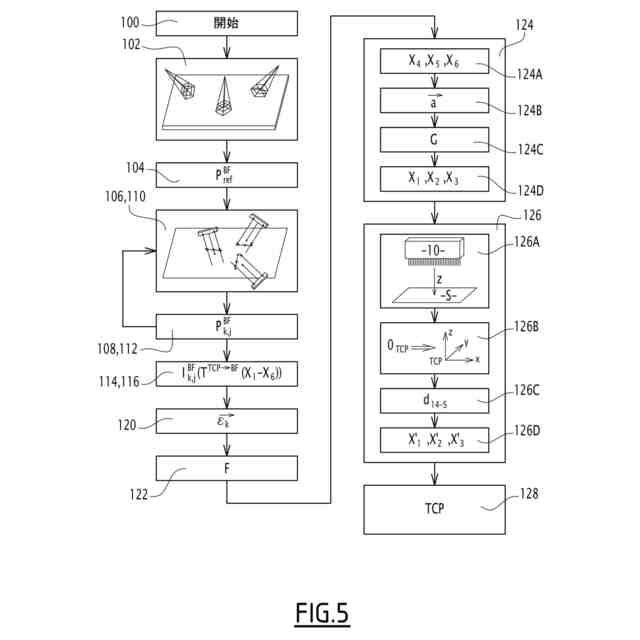
【課題】カメラ及びプリントヘッドを備えた多軸ロボットのための効果的な較正方法を提供する。
【解決手段】数学的表面(P
ref
BF
)が決定され(104)、プリントヘッドが、第1の位置に、その後第2の位置に、持ち込まれ、そこで第1のインパクト及び第2のインパクトが塗布され(106、110)、第1又は第2のインパクトの特徴点(P
1,4
BF
、P
2,4
BF
)が測定される(108、112)。第1の交点(I
1,4
BF
)の座標及び第2の交点(I
2,4
BF
)の座標を表現する(114)。特徴点(P
k,j
BF
)及び交点(I
k,j
BF
)の座標に基づき、偏差(ε
k
)を表現する(120)。その変数が偏差(ε
k
)である目的関数(F)を構成する(122)。目的関数(F)を最小化する、通過行列(T
TCP→PG
)の6つのパラメタ(X
1
-X
6
)の値を決定する(124)。
【選択図】図5
特許請求の範囲
【請求項1】
多軸ロボット(20)を較正する方法であって、前記多軸ロボットは、基本フレーム(BF)に関連付けられており、かつ、カメラ(30)と、第1のノズル(B4)を少なくとも備えるプリントヘッド(10)と、を備えており、前記カメラ及び前記プリントヘッドは、前記多軸ロボットの手首部(21)に取付けられており、この方法は、前記手首部(21)に結合された基準フレーム(PG)における前記プリントヘッド(10)に関連付けられたフレーム(TCP)の方向位置を決定することを含んでおり、前記プリントヘッドに結合された前記フレームの前記方向位置は、前記プリントヘッドに結合された前記フレーム(TCP)と前記手首部に結合された前記フレーム(PG)の間での通過行列(T
TCP→PG
)の6つのパラメタ(X
1
-X
6
)によって定められており、かつ、この方法は、少なくとも、
(a)前記カメラ(30)を用いて、前記基本フレーム(BF)において固定された表面(S)上の、少なくとも1つの点を標的とするステップ(102)と、
(c)前記プリントヘッドを前記固定された表面(S)に対する第1の位置に持ち込むステップであって、前記第1の位置においては、前記プリントヘッドは前記固定された表面に向かうように方向づけられている、ステップと、
(d)前記プリントヘッドが前記第1の位置にあるときに、前記第1のノズル(B4)によって、前記固定された表面上に少なくとも1つの第1のインパクトを塗布するステップ(106)と、
(e)前記カメラ(30)を用いて、前記基本フレームにおける、前記第1のインパクトの第1の特徴点(P
1,4
BF
)の座標を測定するステップ(108)と、
(f)前記プリントヘッドを前記固定された表面(S)に対する少なくとも1つの第2の位置に持ち込むステップであって、前記第2の位置は、前記第1の位置と異なっており、かつ、前記第2の位置においては、前記プリントヘッドは前記固定された表面に向かうように方向づけられている、ステップと、
(g)前記プリントヘッドが前記第2の位置にあるときに、前記第1のノズル(B4)によって、前記固定された表面上に少なくとも1つの第2のインパクトを塗布するステップ(110)と、
(h)前記カメラ(30)を用いて、前記基本フレームにおける、前記第2のインパクトの第2の特徴点(P
2,4
BF
)の座標を測定するステップ(112)と、
を含んでいる、方法において、
前記方法は、少なくとも、
(b)ステップ(a)の結果から、前記固定された表面を示す数学的表面(P
ref
BF
)を決定するステップ(104)と、
(i)前記固定された表面(S)を示す前記数学的表面(P
ref
BF
)と、前記第1の位置にある前記第1のノズル(B4)を通る線(D4)との間の、第1の交点(I
1,4
BF
)の座標を、前記基本フレーム(BF)において、かつ前記通過行列(T
TCP→PG
)を用いて、表現するステップ(114)と、
(j)前記固定された表面を示す前記数学的表面と、前記第2の位置にある前記第1のノズル(B4)を通る前記線との間の、第2の交点(I
2,4
BF
)の座標を、前記BF基本フレームにおいて、かつ前記通過行列(T
TCP→PG
)を用いて、表現するステップ(116)と、
(k)前記プリントヘッドの各位置及び各インパクトについて、その特徴点(P
k,j
BF
)の座標及びその交点(I
k,j
BF
)の座標に基づいて、偏差(ε
k
)を表現するステップ(120)と、
(l)目的関数(F)を構成するステップ(122)であって、前記目的関数(F)の変数は、ステップ(k)において表現された前記偏差(ε
k
)である、ステップ(122)と、
(m)前記目的関数(F)を最小化する、前記通過行列(T
TCP→PG
)の前記6つのパラメタ(X
1
-X
6
)の値を決定するステップ(124)と、
(n)前記手首部(21)に結合された前記フレームにおける、前記プリントヘッド(10)に結合された前記フレーム(TCP)の前記方向位置を定めるように、ステップ(m)において決定された前記6つのパラメタ(X
1
-X
6
)を用いるステップ(128)と、をさらに含んでいる、ことを特徴とする、方法。
続きを表示(約 3,500 文字)
【請求項2】
前記方法は、少なくとも1つの第2のノズル(B28)を備えるプリントヘッドを用いて実行される、方法において、
ステップ(d)の間に、第3のインパクトが、前記第2のノズル(B28)によって、前記固定された表面(S)上に塗布され、
ステップ(e)の間に、人物が、前記基本フレーム(BF)における、前記第3のインパクトの第3の特徴点(P
1,28
BF
)の座標を、前記カメラ(30)を用いて測定し、
ステップ(g)の間に、第4のインパクトが、前記第2のノズル(B28)によって、前記固定された表面(S)上に塗布され、
ステップ(h)の間に、前記人物が、前記基本フレーム(BF)における、前記第4のインパクトの第4の特徴点(P
2,28
BF
)の座標を、前記カメラ(30)を用いて測定し、
ステップ(i)の間に、前記固定された表面(S)を示す前記数学的表面(P
ref
BF
)と、前記第1の位置にある前記第2のノズルを通る線(D28)との間の、第3の交点(I
1,28
BF
)の座標が、前記基本フレーム(BF)において、かつ前記通過行列(T
TCP→PG
)を用いて表現され、
ステップ(j)において、前記固定された表面(S)を示す前記数学的表面(P
ref
BF
)と、前記第2の位置にある前記第2のノズルを通る前記線(D28)との間の、第4の交点(I
2,28
BF
)の座標が、前記基本フレーム(BF)において、かつ前記通過行列(T
TCP→PG
)を用いて表現される、請求項1に記載の方法。
【請求項3】
前記プリントヘッド(10)に結合された前記フレーム(TCP)の軸(z)が、前記プリントヘッドの前記2つのノズル(B4、B28)の噴出方向に平行であること、及び、
前記2つのノズルは、前記軸(z)が通っている前記プリントヘッドの基準ノズル(B16)の各側に、かつ前記基準ノズル(B16)から等距離にあるように、配置されていること、を特徴とする、請求項2に記載の方法。
【請求項4】
前記通過行列(T
TCP→PG
)の前記6つのパラメタ(X
1
-X
3
)が、
3つの並進パラメタ(X
1
-X
3
)と、
3つの回転パラメタ(X
4
-X
6
)と、に分解されることができること、及び、
ステップ(m)は、
(m1)ステップ(l)で構成された前記目的関数(F)を最小化することによって、前記3つの回転パラメタ(X
4
-X
6
)を決定するサブステップ(124A)と、
(m2)各プリントヘッドの位置及び各ノズル(B4、B28)について、その特徴点(P
k,j
BF
)の座標及びその交点(I
k,j
BF
)の座標に基づいて、さらなる偏差(a
k
)を表現するサブステップ(124B)であって、前記他の偏差はステップ(k)で表現されたものとは異なっている、サブステップ(124B)と、
(m3)他の目的関数(G)を構成するサブステップ(124C)であって、前記他の目的関数(G)の変数は、サブステップ(m2)で表現された前記偏差である、サブステップ(124C)と、
(m4)ステップ(m3)で構成された前記目的関数(G)を最小化することによって、前記3つの並進パラメタ(X
1
-X
3
)を決定するサブステップ(124D)と、を含むこと、を特徴とする、請求項1に記載の方法。
【請求項5】
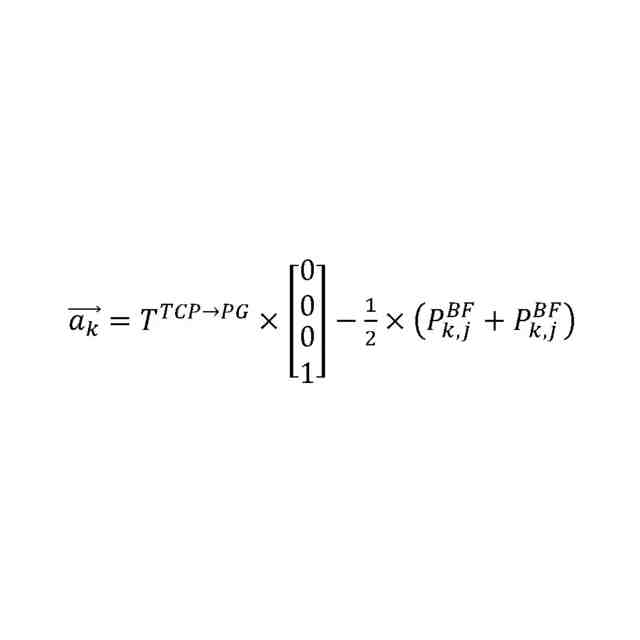
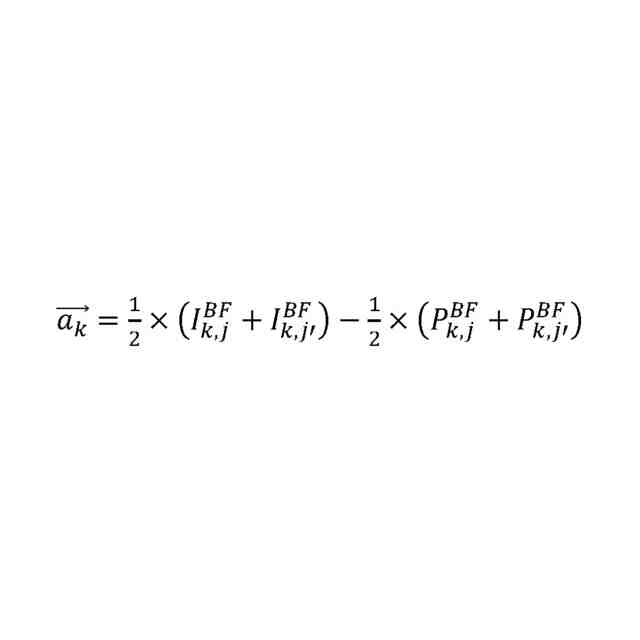
前記他の偏差は、
JPEG
2025090544000027.jpg
17
78
の形態で表現されるか、又は、
JPEG
2025090544000028.jpg
8
80
の形態で表現され、
a
k
は、位置kについての、サブステップ(m2)で表現された前記他の偏差であり、
I
k,j
BF
は、前記基本フレーム(BF)における、位置kについてのランクjのノズルの交点の座標であり、
P
k,j
BF
は、前記基本フレーム(BF)における、位置kについてのランクjの前記ノズルを用いて塗布されたインパクトの特徴点の座標であり、
T
TCP→PG
は、前記プリントヘッドに結合された前記フレーム(TCP)から前記手首部(21)に結合された前記フレーム(PG)への前記通過行列であり、
JPEG
2025090544000029.jpg
18
20
は、前記プリントヘッドのフレームにおける、前記プリントヘッドのフレームの原点(O
TCP
)の表現であること、を特徴とする、請求項3及び4に記載の方法。
【請求項6】
それは、前記プリントヘッド(10)に結合された前記フレーム(TCP)の原点(O
TCP
)を補正するステップ(126)を含んでおり、ステップ(126)は、ステップ(m)とステップ(n)の間で実装され、かつ、
(p1)前記プリントヘッド(10)を、前記固定された表面(S)に向かい合っておりかつ前記固定された表面に直交するように、前記プリントヘッド(10)に結合された前記フレーム(TCP)の前記原点(O
TCP
)が前記固定された表面(S)を示す前記数学的表面(P
ref
BF
)内にある位置に、配置するステップ(126A)と、
(p2)前記プリントヘッド(10)と前記固定された表面(S)の間の距離(d
14-S
)を測定するステップ(126C)と、
(p3)前記並進パラメタ(X
1
-X
3
)を、前記プリントヘッドに結合された前記基準フレーム(TCP)の高さの軸(z)に沿った並進を適用することによって、ステップ(p2)で測定された前記距離が事前決定された距離(d
0
)と等しいように、補正するステップ(126D)と、を含んでいる、ことを特徴とする、請求項4に記載の方法。
【請求項7】
ステップ(c)及びステップ(d)はステップ(e)の前に実行され、かつ、ステップ(f)及びステップ(g)はステップ(h)の前に実行される、ことを特徴とする、請求項1から4及び6のうち一項に記載の方法。
【請求項8】
前記第1の位置及び前記第2の位置は、任意に選択される、ことを特徴とする、請求項1から4及び6のうち一項に記載の方法。
【請求項9】
前記目的関数又は各目的関数(F、G)は、ステップ(k)で、かつ任意にはステップ(m2)で表現された前記偏差の平方の合計である、ことを特徴とする、請求項1から4及び6のうち一項に記載の方法。
【請求項10】
ステップ(m)において前記6つのパラメタ(X
1
-X
6
)の前記値を決定することは、非線形方程式系を、近傍の位置からはじめて、最小二乗法、ニュートン法、勾配法、レーベンバーグ-マルカート法、ニュートン-ラプソン法、割線法、二分法、又は反復法に従って偏微分によって解くことによって実行されるか、又は、近傍の位置からはじめて、前記近傍の位置の周辺で前記6つのパラメタ(X
1
-X
6
)の領域を離散化し、かつ前記目的関数(F、G)を評価することによって解くことによって実行される、ことを特徴とする、請求項1から4及び6のうち一項に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
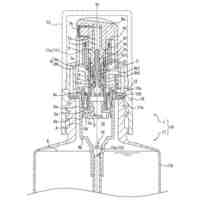
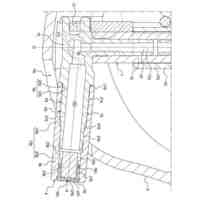
本発明は、基本フレーム(base frame)に関連付けられておりかつカメラ及びプリントヘッドを備えている多軸ロボットを較正する方法に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
プリントヘッドを備えた多軸ロボットを用いてコーティング用製品を塗布する分野においては、このプリントヘッドの動作を精確に制御できることが重要であり、特に、このプリントヘッドの、コーティングされる表面に対する位置決めを考慮に入れることによって制御できることが重要である。このようにするために、多軸ロボットは、ロボットの環境を、特に、プリントヘッドがそれに対して位置決めされる、コーティングされる表面を特定できるカメラを、備えている。
【0003】
現在では、プリントヘッドを備える多軸ロボットの動作は、プリントヘッドに結合された直交フレームの位置及び方向づけは、ロボットの手首部に結合されたフレームに対して、かつ多軸ロボットが配置されている場所に結合された固定された基本フレームに対して知られる、という想定に基づいている。プリントヘッドに結合されたこのフレームの正確な位置は、特に、プリントヘッドがロボットの手首部に取付けられるやり方及びその精度に依存している。
【0004】
仏国特許出願公開第3061076号明細書(特許文献1)から、このプリントヘッドの各動作サイクルの前に、プリントヘッドの基準点に対するプリント点の実際の位置の自動検査を実行することによって、そして必要であればプリント点とプリントヘッドの基準点の間の偏差を補正することによって、ロボット上に取付けられたプリントヘッドの位置を較正することが、知られている。この方法は、実装するにはかなり複雑であり、かつこの文献の教示は、較正を最適化しはしない。
【0005】
他方、独国特許出願公開第102016204123号明細書(特許文献2)は、プリントヘッドの微細な位置決めが用いられるラベルを用いたマーキングする方法を開示しているが、どのようにしてこのような微細な位置決めが達成されることができるかを説明してはいない。
【0006】
したがって、カメラ及びプリントヘッドを備えた多軸ロボットのための効果的な較正方法についてのニーズが存在している。このような方法は、複雑でありすぎることなくかつラベルの使用を必要とすることもなく、容易かつ正確にプリントヘッドをセットアップすることができるものであるべきである。
【先行技術文献】
【特許文献】
【0007】
仏国特許出願公開第3061076号明細書
独国特許出願公開第102016204123号明細書
【発明の概要】
【0008】
この目的のため、本発明は、多軸ロボットを較正する方法であって、多軸ロボットは、基本フレームに関連付けられており、かつ、カメラと、第1のノズルを少なくとも備えるプリントヘッドと、を備えており、カメラ及びプリントヘッドは、多軸ロボットの手首部に取付けられている、方法に関する。本発明によれば、この方法は、手首部に結合されたフレームにおけるプリントヘッドに関連付けられたフレームの方向位置を決定することから成るのであり、プリントヘッドに結合されたフレームの方向位置は、プリントヘッドに結合されたフレームと手首部に結合されたフレームの間を移る行列の6つのパラメタによって定められている。この方法は、少なくとも、
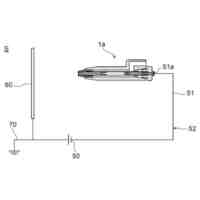
(a)カメラを、基本フレーム内で固定された表面上の、少なくとも1つの点を標的とさせるステップと、
(b)ステップ(a)の結果から、固定された表面を示す数学的表面を決定するステップと、
(c)プリントヘッドを固定された表面に対する第1の位置に持ち込むステップであって、第1の位置においては、プリントヘッドは固定された表面に向かうように方向づけられている、ステップと、
(d)プリントヘッドが第1の位置にあるときに、第1のノズルによって、固定された表面上に少なくとも1つの第1のインパクトを塗布するステップと、
(e)カメラを用いて、基本フレームにおける、第1のインパクトの第1の特徴点の座標を測定するステップと、
(f)プリントヘッドを固定された表面に対する少なくとも1つの第2の位置に持ち込むステップであって、第2の位置は、第1の位置と異なっており、かつ、第2の位置においては、プリントヘッドは固定された表面に向かうように方向づけられている、ステップと、
(g)プリントヘッドが第2の位置にあるときに、第1のノズルによって、固定された表面上に少なくとも1つの第2のインパクトを塗布するステップと、
(h)カメラを用いて、基本フレームにおける、第2のインパクトの第2の特徴点の座標を測定するステップと、
(i)固定された表面を示す数学的表面と、第1の位置にある第1のノズルを通る線との間の、第1の交点の座標を、BF基本フレームにおいて、かつ通過行列を用いて、表現するステップと、
(j)固定された表面を示す数学的表面と、第2の位置にある第1のノズル(B4)を通る線との間の、第2の交点の座標を、BF基本フレームにおいて、かつ通過行列を用いて、表現するステップと、
(k)プリントヘッドの各位置及び各インパクトについて、その特徴点の座標及びその交点の座標に基づいて、偏差を表現するステップと、
(l)目的関数を構成するステップであって、目的関数の変数は、ステップ(k)において表現された偏差である、ステップと、
(m)目的関数を最小化する、通過行列の6つのパラメタの値を決定するステップと、
(n)手首部に結合されたフレームにおける、プリントヘッドに結合されたフレームの方向位置を定めるように、ステップ(m)において決定された6つのパラメタを用いるステップと、を含んでいる。
【0009】
本発明の方法におけるステップにより、手首部に結合されたフレームにおけるプリントヘッドに結合されたフレームの方向位置を定めることが可能になり、それによりプリントヘッドを所定の位置に正しく位置決めすることが可能になる。換言すれば、本発明は、ロボットの手首部に結合された基準フレームにおけるプリントヘッドの位置及び方向づけを知ることを可能にしつつ、一方では、ロボットモデルが、ロボットが設置された部屋に結合された基本基準フレームにおける手首部の位置を知ることを可能にする。したがって、本発明の方法は、プリントヘッドと、このプリントヘッドによってコーティングされる固定された表面の間での相対的な位置を精確に決定することを可能にするのである。
【0010】
本発明の有利ではあるが必須ではない態様によれば、このような方法は、技術的に可能な組み合わせを考慮に入れつつ、以下の特徴のうち1つ以上を組み入れることができる。
ステップ(d)において、第3のインパクトが、第2のノズルによって、固定された表面上に塗布され、
ステップ(e)において、人物が、基本フレームにおける、第3のインパクトを特徴づける第3の点の座標を、カメラを用いて測定し、
ステップ(g)において、第4のインパクトが、第2のノズルによって、固定された表面上に塗布され、
ステップ(h)において、人物が、基本フレームにおける、第4のインパクトを特徴づける第4の点の座標を、カメラを用いて測定し、
ステップ(i)において、固定された表面を示す数学的表面と、第1の位置にある第2のノズルを通る線との間の、第3の交点の座標が、基本フレームにおいて、かつ通過行列を用いて表現され、
ステップ(j)において、固定された表面を示す数学的表面と、第2の位置にある第2のノズルを通る線との間の、第4の交点の座標が、基本フレームにおいて、かつ通過行列を用いて表現される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ベック株式会社
被膜形成方法
3か月前
ベック株式会社
被膜形成方法
3か月前
アイカ工業株式会社
塗料仕上げ工法
9日前
株式会社吉野工業所
キャップ
2か月前
ベック株式会社
装飾被膜の形成方法
1か月前
プルガティオ株式会社
噴霧装置
2か月前
日本ライナー株式会社
塗装装置
10日前
プルガティオ株式会社
噴霧装置
2か月前
個人
スプレー缶高所対応携帯ホルダー
9日前
プルガティオ株式会社
噴霧装置
2か月前
ヒット工業株式会社
マスキング具
1か月前
中外炉工業株式会社
塗工装置
1か月前
株式会社吉野工業所
ポンプ式吐出器
2か月前
旭サナック株式会社
粉体塗装装置
19日前
株式会社吉野工業所
吐出器
2か月前
株式会社吉野工業所
吐出器
2か月前
株式会社トーモク
印刷装置および印刷方法
9日前
三菱鉛筆株式会社
多液混合型塗布具
1か月前
積水ハウス株式会社
接着剤塗布装置
1か月前
株式会社大関
塗装用ローラとその製造方法
3か月前
AWJ株式会社
ステンシルプレートセット
1か月前
Mipox株式会社
塗装物の製造方法
22日前
株式会社吉野工業所
ノズル部材
2か月前
リンテック株式会社
機能性層の製造方法
3か月前
有限会社橋本漆芸
ガラス瓶の漆調塗装及び加飾
25日前
株式会社吉野工業所
吐出器
1か月前
株式会社吉野工業所
吐出器
1か月前
株式会社吉野工業所
吐出器
1か月前
株式会社吉野工業所
吐出器
2か月前
株式会社吉野工業所
吐出器
2か月前
鈴健興業株式会社
流体放出ユニット及び作業機械
1か月前
ライオン株式会社
吐出用器具
3か月前
アネスト岩田株式会社
静電噴霧装置
29日前
ライオン株式会社
吐出用器具
3か月前
Mipox株式会社
機能性部材の製造方法
1か月前
日産自動車株式会社
インクジェットヘッド
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ