TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089715
公報種別
公開特許公報(A)
公開日
2025-06-16
出願番号
2023204512
出願日
2023-12-04
発明の名称
作業支援装置および作業支援方法
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/26 20060101AFI20250609BHJP(水工;基礎;土砂の移送)
要約
【課題】作業現場にオブジェクトが配置されたときの状況を事前に取得することができる。
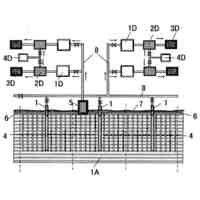
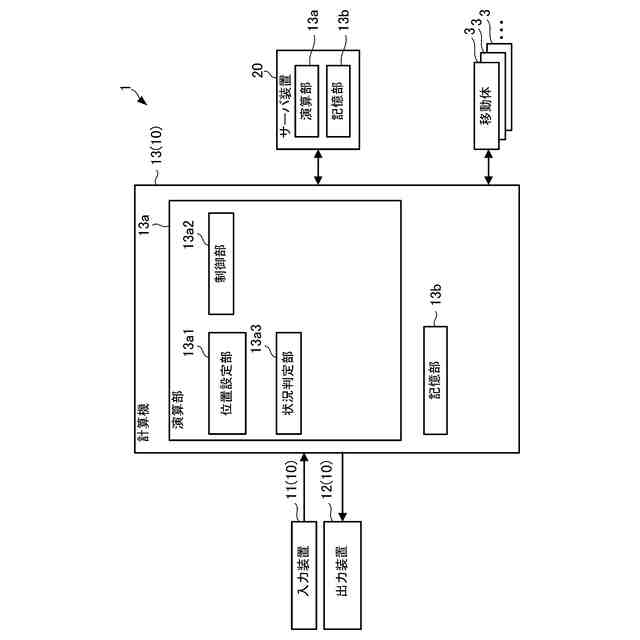
【解決手段】作業支援装置1は、位置設定部13a1と、制御部13a2と、を備える。位置設定部13a1は、オブジェクト配置位置4を設定する。オブジェクト配置位置4は、作業現場2に配置予定のオブジェクト5の候補位置である。制御部13a2は、オブジェクト配置位置4に配置されるように移動体3(例えば、飛行体)を制御する。制御部13a2は、移動体3に、オブジェクト配置位置4での状況を取得させる。
【選択図】図1
特許請求の範囲
【請求項1】
作業現場に配置予定のオブジェクトの候補位置であるオブジェクト配置位置を設定する位置設定部と、
前記オブジェクト配置位置に配置されるように飛行体を制御し、前記オブジェクト配置位置での状況を取得させる制御部と、
を備える、
作業支援装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の作業支援装置であって、
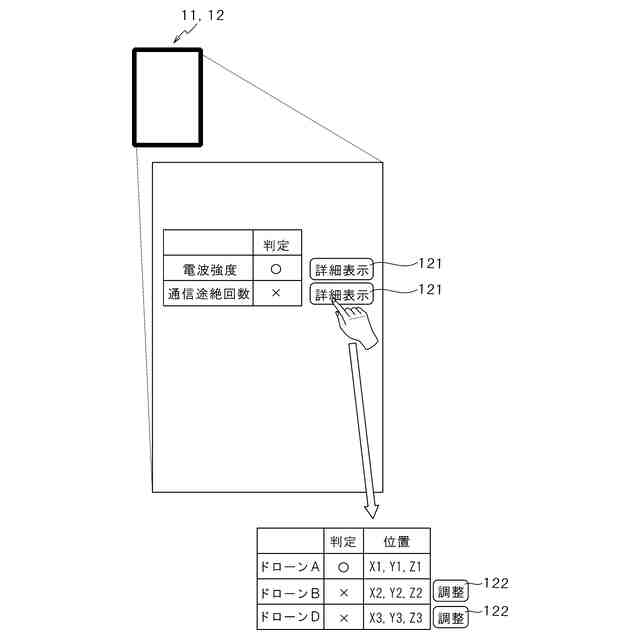
前記位置設定部は、前記作業現場において無線通信を行う無線機器の候補位置である通信対象配置位置を前記オブジェクト配置位置として設定し、
前記飛行体の位置での電波状況が所定の許容条件を満たしているか否かの判定を行う状況判定部、
をさらに備える、
作業支援装置。
【請求項3】
請求項2に記載の作業支援装置であって、
前記電波状況は、前記飛行体と、無線基地局との間の通信に関するものである、
作業支援装置。
【請求項4】
請求項3に記載の作業支援装置であって、
前記電波状況が前記所定の許容条件を満たさないと前記状況判定部が判定した場合、
前記位置設定部は、前記飛行体と前記無線基地局との間に、少なくとも1つの中継地点となる位置を前記通信対象配置位置としてさらに設定する、
作業支援装置。
【請求項5】
請求項2に記載の作業支援装置であって、
前記無線機器の候補位置は、作業機械の配置の候補となる位置である、
作業支援装置。
【請求項6】
請求項2に記載の作業支援装置であって、
前記無線機器の候補位置は、無線通信を中継する中継地点の配置の候補となる位置である、
作業支援装置。
【請求項7】
請求項2に記載の作業支援装置であって、
前記無線機器の候補位置は、無線基地局の候補となる位置である、
作業支援装置。
【請求項8】
請求項2に記載の作業支援装置であって、
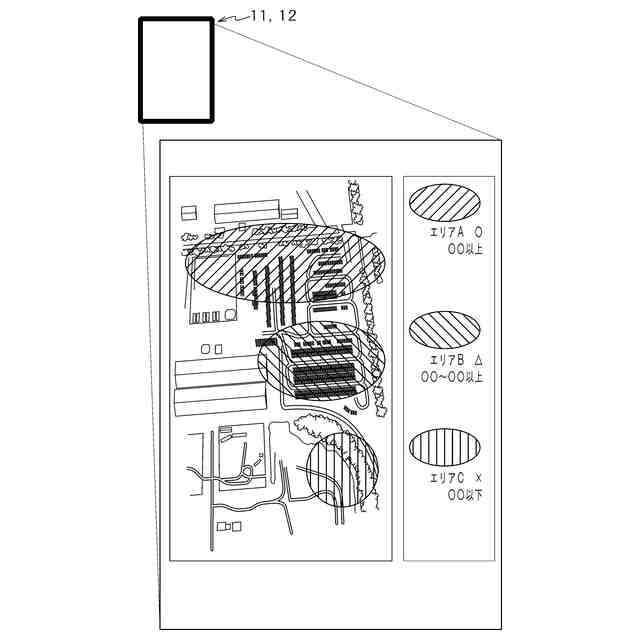
前記通信対象配置位置は、領域で設定されるものであり、
前記状況判定部は、前記領域内の1以上の電波状況判定位置における電波状況を判定する、
作業支援装置。
【請求項9】
請求項8に記載の作業支援装置であって、
前記状況判定部が、前記領域内の複数の前記電波状況判定位置の電波状況を判定する場合、前記状況判定部は、所定距離以上の間隔をあけた複数の前記電波状況判定位置の電波状況を判定する、
作業支援装置。
【請求項10】
請求項2に記載の作業支援装置であって、
前記状況判定部による電波状況の判定の対象となる位置である電波状況判定位置は、予め設定された前記作業現場の地形情報に基づいて設定される、
作業支援装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援装置および作業支援方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
例えば特許文献1に、走行システムにおける無線通信品質を取得する無人走行車が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-36865号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業現場に作業機械などのオブジェクトを実際に配置しなくても、事前に作業現場の状況が把握できることが望まれている。
【0005】
本発明は、作業現場にオブジェクトが配置されたときの状況を事前に取得することができる作業支援装置および作業支援方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
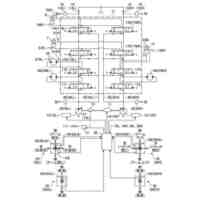
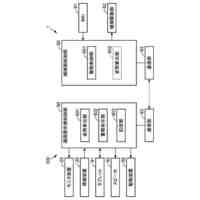
作業支援装置は、位置設定部と、制御部と、を備える。位置設定部は、オブジェクト配置位置を設定する。オブジェクト配置位置は、作業現場に配置予定のオブジェクトの候補位置である。制御部は、前記オブジェクト配置位置に配置されるように飛行体を制御する。制御部は、飛行体に、前記オブジェクト配置位置での状況を取得させる。
【0007】
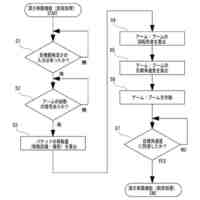
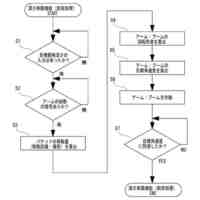
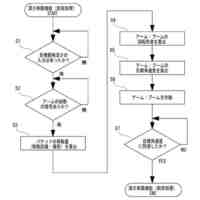
作業支援装置は、位置設定部と、制御部と、状況判定部と、を備える。位置設定部は、オブジェクト配置位置を設定する。オブジェクト配置位置は、作業現場に配置予定のオブジェクトの候補位置である。制御部は、前記オブジェクト配置位置に配置されるように移動体を制御する。制御部は、移動体に、前記オブジェクト配置位置での電波状況を取得させる。状況判定部は、前記移動体が取得した前記電波状況が所定の許容条件を満たしているか否かの判定を行う。前記電波状況が前記所定の許容条件を満たさないと前記状況判定部が判定した場合、前記所定の許容条件を満たす前記オブジェクト配置位置が見つかるまで、前記位置設定部は別の候補位置を前記オブジェクト配置位置として設定し、前記制御部は前記移動体に当該オブジェクト配置位置での電波状況を取得させる。
【0008】
作業支援方法は、位置設定ステップと、制御ステップと、を備える。位置設定ステップは、オブジェクト配置位置を設定する。オブジェクト配置位置は、作業現場に配置予定のオブジェクトの候補位置である。制御部は、前記オブジェクト配置位置に配置されるように飛行体を制御する。制御部は、飛行体に、前記オブジェクト配置位置での状況を取得させる。
【0009】
作業支援方法は、位置設定ステップと、制御ステップと、状況判定ステップと、を備える。位置設定ステップは、オブジェクト配置位置を設定する。オブジェクト配置位置は、作業現場に配置予定のオブジェクトの候補位置である。制御ステップは、前記オブジェクト配置位置に配置されるように移動体を制御する。制御ステップは、移動体に前記オブジェクト配置位置での電波状況を取得させる。状況判定ステップは、前記移動体が取得した前記電波状況が所定の許容条件を満たしているか否かの判定を行う。前記状況判定ステップにおいて前記電波状況が前記所定の許容条件を満たさないと前記状況判定部が判定した場合、前記所定の許容条件を満たす前記オブジェクト配置位置が見つかるまで、別の候補位置を前記オブジェクト配置位置として設定する位置設定ステップを実行する。前記状況判定ステップにおいて前記電波状況が前記所定の許容条件を満たさないと判定された場合、前記所定の許容条件を満たす前記オブジェクト配置位置が見つかるまで、前記移動体に当該オブジェクト配置位置での電波状況を取得させる制御ステップを実行する。
【発明の効果】
【0010】
上記の作業支援装置により、作業現場にオブジェクトが配置されたときの状況を事前に取得することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
27日前
戸田建設株式会社
覆土材
11日前
戸田建設株式会社
緑化覆土材
11日前
株式会社大林組
作業機械
7日前
株式会社竹中工務店
杭基礎構造
今日
住友建機株式会社
ショベル
1か月前
株式会社エコ・プランナー
取水装置
1か月前
株式会社竹中工務店
建物の基礎構造
5日前
株式会社大林組
人工地盤構造
20日前
株式会社クボタ
作業機
20日前
株式会社クボタ
作業機
5日前
コベルコ建機株式会社
操作装置
1か月前
株式会社クボタ
作業機
20日前
株式会社クボタ
作業機
20日前
株式会社クボタ
作業機
20日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
株式会社クボタ
作業機
5日前
住友重機械工業株式会社
作業機械
1か月前
株式会社プラント・ツリース
杭基礎構造
26日前
越後商事株式会社
ツース盤
29日前
株式会社ダイトー
護岸コンクリートの補修構造
1か月前
個人
狭小水域浚渫システムおよび方法
26日前
鹿島建設株式会社
設備架台の施工方法
27日前
株式会社大林組
山留め工事の支援方法
5日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
1か月前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
19日前
鹿島建設株式会社
杭施工方法
27日前
前田工繊株式会社
救助用ネット装置
11日前
強化土エンジニヤリング株式会社
地盤強化工法
12日前
日立建機株式会社
作業機械
12日前
ヒロセ株式会社
支持杭と受桁の接合構造
11日前
コベルコ建機株式会社
作業機械
19日前
コベルコ建機株式会社
操作装置及び操作システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ