TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088431
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203125
出願日
2023-11-30
発明の名称
作業内容推定システムおよび作業内容推定方法
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/26 20060101AFI20250604BHJP(水工;基礎;土砂の移送)
要約
【課題】作業内容の推定に用いる機械学習モデルの汎用性を高めることができる作業内容推定システムおよび作業内容推定方法を提供する。
【解決手段】作業内容推定システムは、時刻に対応付けられた作業機械のログ情報を取得する取得部と、前記作業機械の可動部の外観動作に対応する時系列の情報である外観動作情報を入力して前記作業機械の作業内容の推定結果を表す情報を出力する学習済み機械学習モデルに、前記ログ情報に基づく前記外観動作情報を入力することで、前記作業機械の作業内容の時系列を推定する推定部と、を備える。
【選択図】図6
特許請求の範囲
【請求項1】
時刻に対応付けられた作業機械のログ情報を取得する取得部と、
前記作業機械の可動部の外観動作に対応する時系列の情報である外観動作情報を入力して前記作業機械の作業内容の推定結果を表す情報を出力する学習済み機械学習モデルに、前記ログ情報に基づく前記外観動作情報を入力することで、前記作業機械の作業内容の時系列を推定する推定部と、
を備える作業内容推定システム。
続きを表示(約 610 文字)
【請求項2】
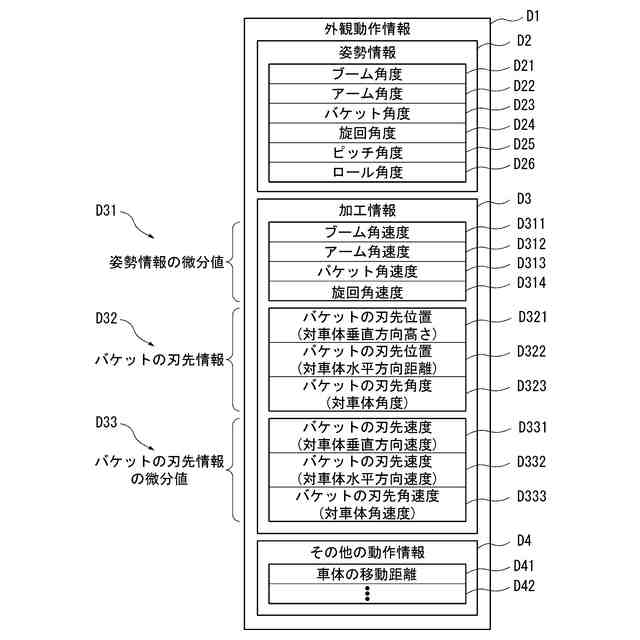
前記外観動作情報は、前記作業機械の姿勢を表す姿勢情報と、前記姿勢情報に基づいて算出された、位置、速度、角度、または、角速度の少なくとも一つを表す情報を含む
請求項1に記載の作業内容推定システム。
【請求項3】
前記姿勢情報は、前記作業機械のロール角度、ピッチ角度、旋回角度、ブーム角度、アーム角度及びバケット角度の少なくとも一つを表す情報を含む
請求項2に記載の作業内容推定システム。
【請求項4】
前記姿勢情報に基づいて算出された、位置、速度、角度、または、角速度の少なくとも一つを表す情報は、前記作業機械のロール角度、ピッチ角度、旋回角度、ブーム角度、アーム角度またはバケット角度に基づいて算出された、前記可動部の角速度、前記作業機械の作業具の位置、速度、角度、または角速度の少なくも一つを表す情報を含む
請求項3に記載の作業内容推定システム。
【請求項5】
時刻に対応付けられた作業機械のログ情報を取得するステップと、
前記作業機械の可動部の外観動作に対応する時系列の情報である外観動作情報を入力して前記作業機械の作業内容の推定結果を表す情報を出力する学習済み機械学習モデルに、前記ログ情報に基づく前記外観動作情報を入力することで、前記作業機械の作業内容の時系列を推定するステップと、
を含む作業内容推定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業内容推定システムおよび作業内容推定方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、作業機械のログ情報から作業機械の各時刻における作業内容を推定する推定部を備える分析支援システムが記載されている。推定部はログ情報を時系列順に単位作業予測モデルに入力することで単位作業に係る尤度の時系列を得る。なお、ログ情報は、作業機械が備える複数のセンサによって取得された作業機械の状態を示す時系列の情報である。また、特許文献1には、ログ情報の例として、位置情報、ロール角度、ピッチ角度、旋回角度、ブーム角度、アーム角度、バケット角度のほか、操作装置のPPC(Proportional Pressure Control)圧を示す情報、エンジン出力、瞬時燃焼消費量を示す情報等が挙げられている。
【先行技術文献】
【特許文献】
【0003】
特開2020-183615号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述したログ情報において、エンジン出力、瞬時燃料消費量等の情報は、作業機械の車格の違いによって影響を受けやすい情報である。このため、これらの情報を機械学習モデルの入力情報とした場合、車格の違いに応じて複数のモデルを用意しなければないない場合がある。
【0005】
本開示は、作業内容の推定に用いる機械学習モデルの汎用性を高めることができる作業内容推定システムおよび作業内容推定方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の作業内容推定システムは、時刻に対応付けられた作業機械のログ情報を取得する取得部と、前記作業機械の可動部の外観動作に対応する時系列の情報である外観動作情報を入力して前記作業機械の作業内容の推定結果を表す情報を出力する学習済み機械学習モデルに、前記ログ情報に基づく前記外観動作情報を入力することで、前記作業機械の作業内容の時系列を推定する推定部と、を備える。
【0007】
本開示の作業内容推定方法は、時刻に対応付けられた作業機械のログ情報を取得するステップと、前記作業機械の可動部の外観動作に対応する時系列の情報である外観動作情報を入力して前記作業機械の作業内容の推定結果を表す情報を出力する学習済み機械学習モデルに、前記ログ情報に基づく前記外観動作情報を入力することで、前記作業機械の作業内容の時系列を推定するステップと、を含む。
【発明の効果】
【0008】
本開示の表示制御装置および表示制御方法によれば、作業内容の推定に用いる機械学習モデルの汎用性を高めることができる。
【図面の簡単な説明】
【0009】
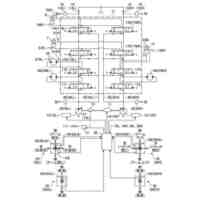
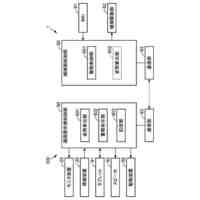
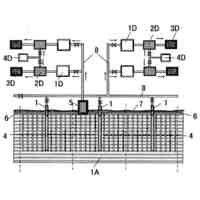
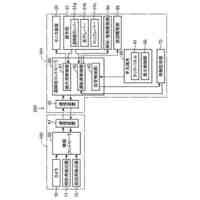
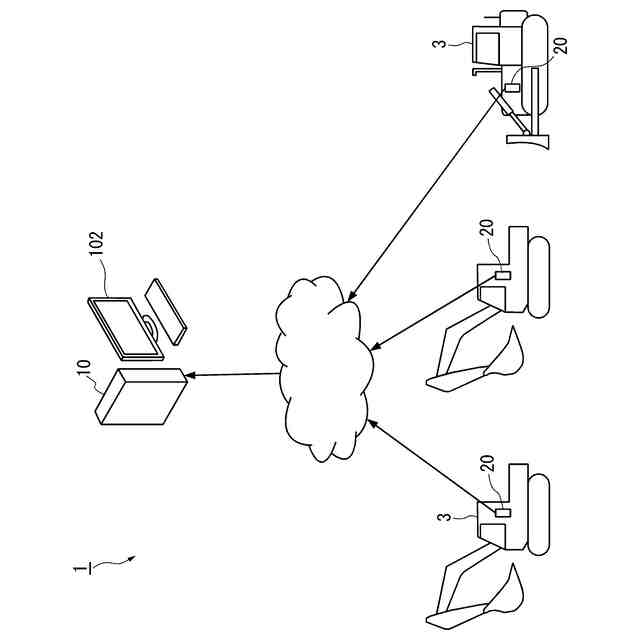
第1の実施形態に係る分析支援システムの全体構成を示す図である。
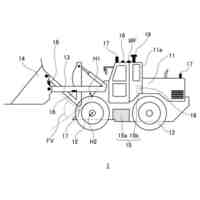
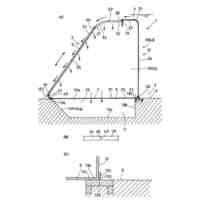
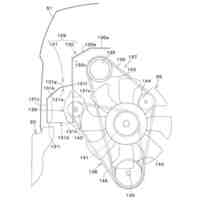
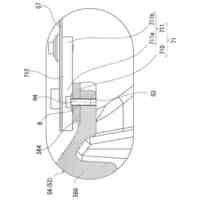
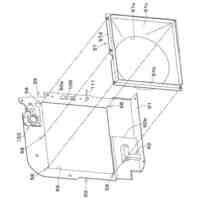
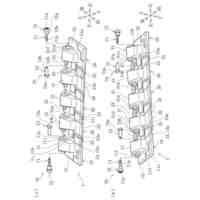
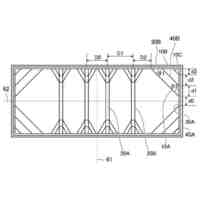
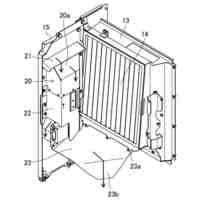
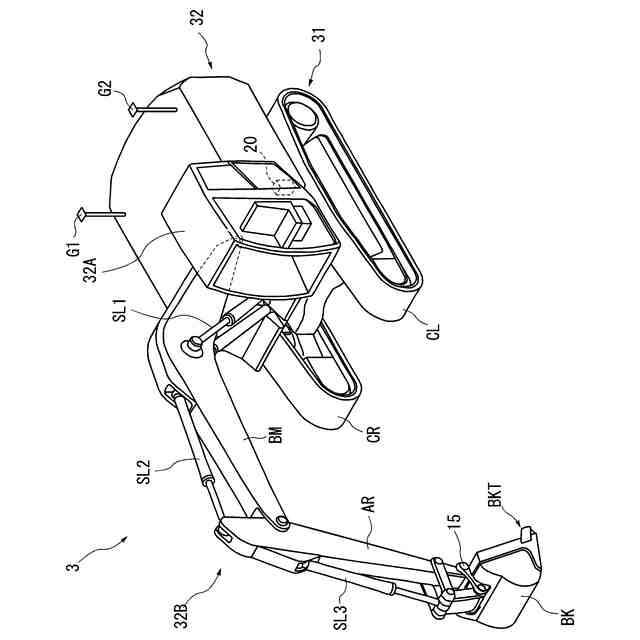
第1の実施形態に係る作業機械の構造を示す図である。
第1の実施形態に係る作業内容推定システムの機能構成を示す図である。
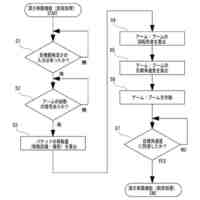
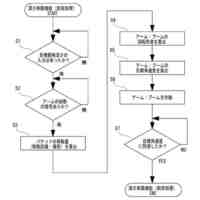
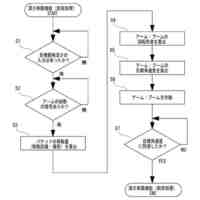
第1の実施形態に係る作業内容推定システムの処理フローを示す図である。
第1の実施形態に係るログ情報の例を示す図である。
第1の実施形態に係る外観動作情報の例を示す図である。
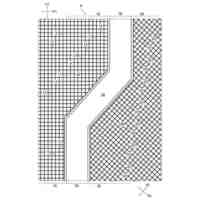
第1の実施形態に係る作業内容の推定に用いるヒートマップを示す図である。
【発明を実施するための形態】
【0010】
<第1の実施形態>
以下、第1の実施形態に係る表示制御装置および表示制御方法について、図1~図7を参照しながら詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
26日前
戸田建設株式会社
覆土材
10日前
戸田建設株式会社
緑化覆土材
10日前
株式会社竹中工務店
壁接合工法
1か月前
株式会社大林組
作業機械
6日前
住友建機株式会社
ショベル
1か月前
株式会社竹中工務店
建物の基礎構造
4日前
株式会社大林組
人工地盤構造
19日前
株式会社エコ・プランナー
取水装置
1か月前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
コベルコ建機株式会社
操作装置
1か月前
住友重機械工業株式会社
作業機械
1か月前
越後商事株式会社
ツース盤
28日前
株式会社ダイトー
護岸コンクリートの補修構造
1か月前
株式会社プラント・ツリース
杭基礎構造
25日前
鹿島建設株式会社
設備架台の施工方法
26日前
個人
狭小水域浚渫システムおよび方法
25日前
株式会社大林組
山留め工事の支援方法
4日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
1か月前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
18日前
前田工繊株式会社
救助用ネット装置
10日前
鹿島建設株式会社
杭施工方法
26日前
強化土エンジニヤリング株式会社
地盤強化工法
11日前
日立建機株式会社
作業機械
11日前
コベルコ建機株式会社
作業機械
18日前
ヒロセ株式会社
支持杭と受桁の接合構造
10日前
コベルコ建機株式会社
操作装置及び操作システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ