TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088131
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202615
出願日
2023-11-30
発明の名称
インパクト工具、及びインパクト工具の制御方法
出願人
パナソニック株式会社
代理人
弁理士法人北斗特許事務所
主分類
B25B
21/02 20060101AFI20250604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータの的確な制御の容易化を図ることができるインパクト工具を提供する。
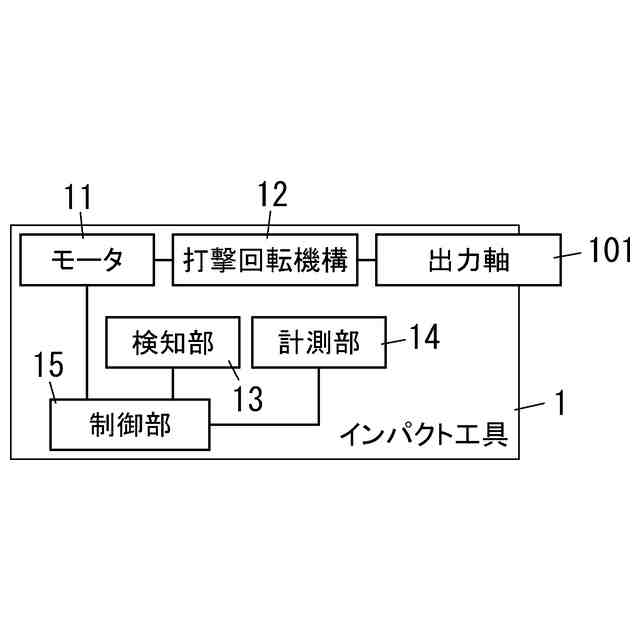
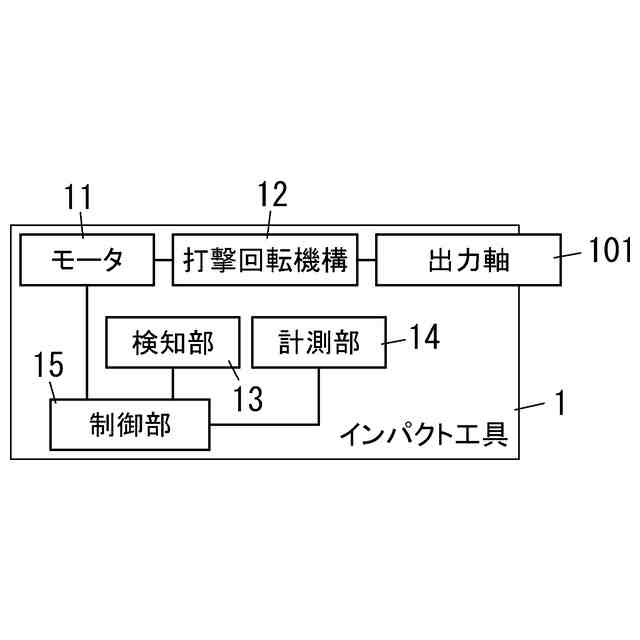
【解決手段】インパクト工具1は、モータ11と打撃回転機構12と検知部13と制御部15とを備える。モータ11は、正転及び逆転が可能である。打撃回転機構12は、モータ11から回転力を受けて正転及び逆転を繰り返しながら回転慣性力による打撃動作を行う。検知部13は、モータ11又は打撃回転機構12の正転での回転量に関する検知を行う。制御部15は、検知部13が検知した回転量及び回転量の変化の少なくとも一方に基づいてモータ11を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
正転及び逆転が可能なモータと、
前記モータから回転力を受けて前記正転及び前記逆転を繰り返しながら回転慣性力による打撃動作を行う打撃回転機構と、
前記モータ又は前記打撃回転機構の前記正転での回転量に関する検知を行う検知部と、
前記検知部が検知した前記回転量及び前記回転量の変化の少なくとも一方に基づいて前記モータを制御する制御部と、を備える、
インパクト工具。
続きを表示(約 1,400 文字)
【請求項2】
前記制御部は、
前記検知部が検知した前記回転量の前記変化を基に、前記打撃動作が完了したか否かの判断を行い、
前記判断の結果が、前記打撃動作が完了していないとの否定的結果から前記打撃動作が完了したとの肯定的結果に変化するのと略同時に、前記モータを逆転させる、
請求項1に記載のインパクト工具。
【請求項3】
前記制御部は、前記検知部が検知した前記回転量が所定値に戻るまで、前記モータの前記逆転を継続させる、
請求項2に記載のインパクト工具。
【請求項4】
前記制御部は、前記判断の前記結果が前記否定的結果から前記肯定的結果に変化したことに応じて前記モータへの電流を停止させた後に、前記電流とは逆向きの電流の供給を開始することで、前記モータを逆転させる、
請求項2又は3に記載のインパクト工具。
【請求項5】
前記打撃回転機構の変換結果である打撃回転力を出力する出力軸と、
前記打撃回転力で対象物の締め付けを行う際の締付トルクを計測する計測動作を行う計測部と、を更に備え、
前記計測部は、前記判断の前記結果が前記否定的結果から前記肯定的結果に変化したことに応じて、前記計測動作を行い、
前記制御部は、前記計測動作が行われた後に前記モータを逆転させる、
請求項2又は3に記載のインパクト工具。
【請求項6】
前記打撃回転機構の変換結果である打撃回転力を出力する出力軸と、
前記打撃回転力で対象物の締め付けを行う際の締付トルクを計測する計測動作を行う計測部と、を更に備え、
前記制御部は、前記判断の前記結果が前記否定的結果から前記肯定的結果に変化してから所定時間が経過した後、前記モータを逆転させ、
前記計測部は、前記制御部が前記モータを逆転させる前に、前記計測動作を行う、
請求項2又は3に記載のインパクト工具。
【請求項7】
前記検知部は、前記モータの前記正転での回転量を検知する、
請求項1に記載のインパクト工具。
【請求項8】
正転及び逆転が可能なモータと、前記モータから回転力を受けて前記正転及び前記逆転を繰り返しながら回転慣性力による打撃動作を行う打撃回転機構と、を備えるインパクト工具の制御方法であって、
前記モータ又は前記打撃回転機構が前記正転で回転した量である回転量に関する検知を行う検知ステップと、
前記検知ステップで検知された前記回転量及び前記回転量の変化の少なくとも一方に基づいて前記モータを制御する制御ステップと、を含む、
インパクト工具の制御方法。
【請求項9】
前記制御ステップでは、
前記検知ステップで検知された前記回転量の前記変化を基に、前記打撃動作が完了したか否かの判断を行い、
前記判断の結果が、前記打撃動作が完了していないとの否定的結果から前記打撃動作が完了したとの肯定的結果に変化するのと略同時に、前記モータを逆転させる、
請求項8に記載のインパクト工具の制御方法。
【請求項10】
前記制御ステップでは、前記検知ステップで検知された前記回転量が所定値に戻るまで、前記モータの前記逆転を継続させる、
請求項9に記載のインパクト工具の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、インパクト工具、及びインパクト工具の制御方法に関し、より詳細には、打撃動作を行うインパクト工具、及びそのようなインパクト工具の制御方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、正転又は逆転可能なモータと、モータにより回転されるハンマと、ハンマにより間欠的に第一の打撃力で打撃されるアンビルと、モータが逆転する度にモータに流れる第一の逆転電流値を検出する電流検出手段と、モータの回転を制御する制御手段とを備える電動工具が記載されている。この電動工具では、制御手段が、第一の逆転電流値が所定値以下になるときに、次のモータの逆転により電流検出手段によって検出される第二の逆転電流値も所定値と略同一となるか否かを判別する。これにより、締付作業が確実に行われたか否かを確認できると共に、締付作業中の急激な負荷の増大に起因する締付作業完了の誤判断を回避できる。
【先行技術文献】
【特許文献】
【0003】
特開2015-30063号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の電動工具では、打撃の際の反発力でモータが逆転する際に生じる逆転電流値(つまり、外力によるモータの回転で発電された電流)を基に、モータの制御を行っているが、逆転電流値は、逆転中のモータの回転速度の変化に対し遅れて変化するため、締付作業に関する判断を正しく行えない可能性がある。
【0005】
特許文献1に記載の電動工具のような従来のインパクト工具では、一般に、モータの電流値(又は、アンビルの歪を磁気的又は電気的に検知する歪センサの検知結)を基にモータの回転を制御しているが、電流値(又は、歪センサの検知結果)の変化と、回転速度の変化との間に時間差が生じるため、モータの回転速度が正しく検知されず、モータの的確な制御が困難となる可能性がある。モータの的確な制御が困難になると、例えば、締付トルクのばらつきが生じる。
【0006】
本開示の目的は、モータの的確な制御の容易化を図ることができるインパクト工具、及びインパクト工具の制御方法を提供することである。
【課題を解決するための手段】
【0007】
本開示の一態様に係るインパクト工具は、モータと打撃回転機構と検知部と制御部とを備える。前記モータは、正転及び逆転が可能である。前記打撃回転機構は、前記モータから回転力を受けて前記正転及び前記逆転を繰り返しながら回転慣性力による打撃動作を行う。前記検知部は、前記モータ又は前記打撃回転機構の前記正転での回転量に関する検知を行う。前記制御部は、前記検知部が検知した前記回転量及び前記回転量の変化の少なくとも一方に基づいて前記モータを制御する。
【0008】
本開示の一態様に係るインパクト工具の制御方法は、モータと打撃回転機構とを備えるインパクト工具の制御方法である。前記モータは、正転及び逆転が可能である。前記打撃回転機構は、前記モータから回転力を受けて前記正転及び前記逆転を繰り返しながら回転慣性力による打撃動作を行う。前記インパクト工具の制御方法は、検知ステップと制御ステップとを含む。前記検知ステップは、前記モータ又は前記打撃回転機構の前記正転での回転量に関する検知を行う。前記制御ステップは、前記検知ステップで検知された前記回転量及び前記回転量の変化の少なくとも一方に基づいて前記モータを制御する。
【発明の効果】
【0009】
本開示のインパクト工具、及びインパクト工具の制御方法は、モータの的確な制御の容易化を図ることができるという効果がある。
【図面の簡単な説明】
【0010】
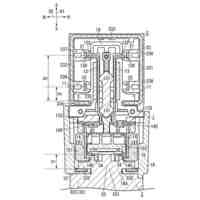
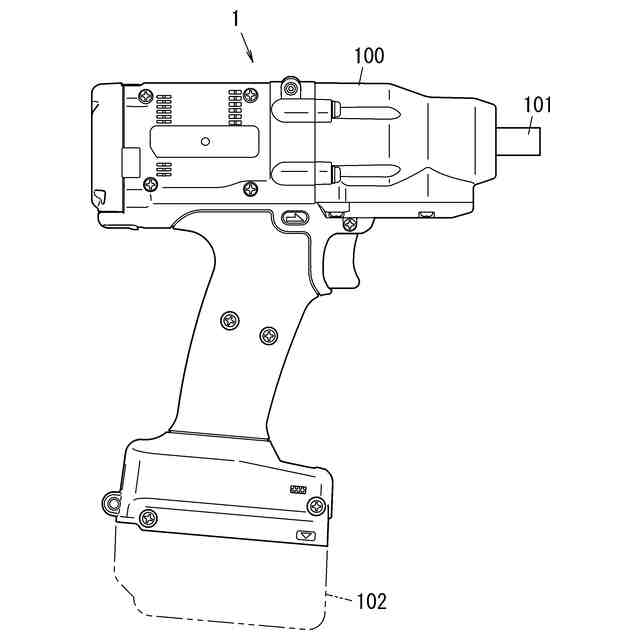
図1は、本開示の実施形態に係るインパクト工具の外観図である。
図2は、同上のインパクト工具のブロック図である。
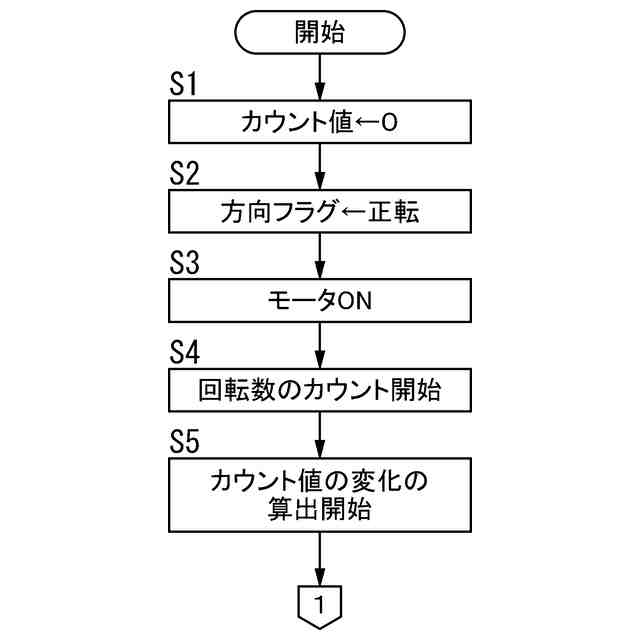
図3は、同上のインパクト工具の制御部の動作の一部を説明するフローチャートである。
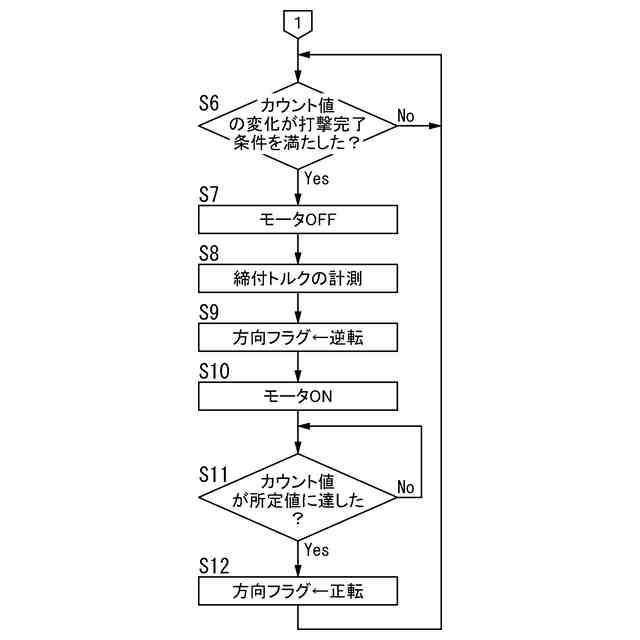
図4は、同上の動作の他の一部を説明するフローチャートである。
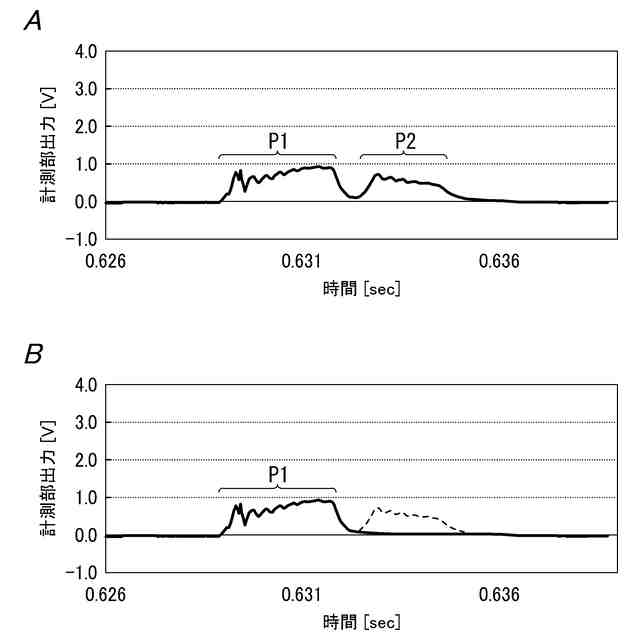
図5Aは、比較例のインパクト工具における計測部(磁歪センサ)の出力波形を示す比較用のグラフであり、図5Bは、同上のインパクト工具における計測部の出力波形の一例を示すグラフである。
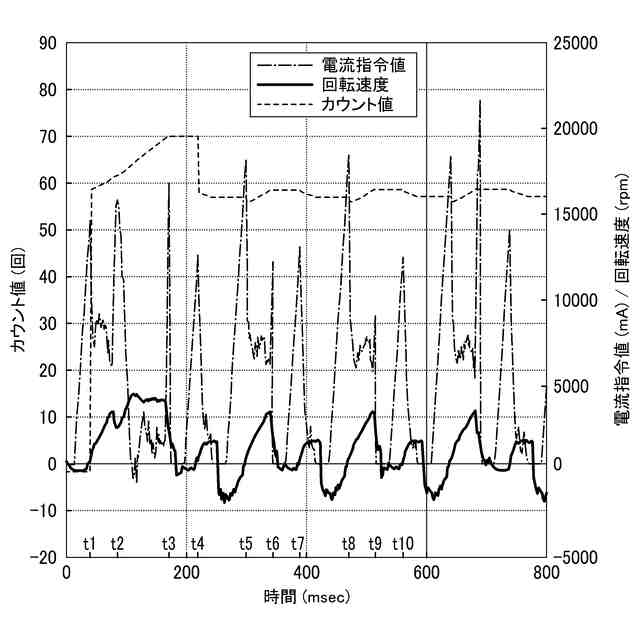
図6は、同上のインパクト工具における検知部(エンコーダ)の出力波形と、制御部からモータへの電流指令値の波形と、モータの回転速度の波形と、を比較可能に示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パナソニック株式会社
アダプタ、ダクトシステム、及び電気機器システム
5日前
日東精工株式会社
電動ドライバ
20日前
株式会社クレスコ
補助吸着具
1か月前
トヨタ自動車株式会社
関節機構
25日前
株式会社ダイヘン
移動体
23日前
株式会社不二越
ロボット
1か月前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
19日前
工機ホールディングス株式会社
作業機
11日前
学校法人五島育英会
アーム機構
25日前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
11日前
株式会社スター精機
吸着パッド
19日前
株式会社アイエイアイ
グリッパー
1か月前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
オークラ輸送機株式会社
ハンド装置
4日前
株式会社スター精機
産業用ロボット
17日前
オークラ輸送機株式会社
ハンド装置
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
川崎重工業株式会社
ロボットシステム
5日前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社マキタ
電動作業機
26日前
株式会社マキタ
電動作業機
26日前
株式会社リコー
多関節ロボット
24日前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社安川電機
ロボット
17日前
株式会社ジャノメ
ロボット
13日前
株式会社安川電機
ロボット
17日前
株式会社ダイヘン
ロボット制御システム
23日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ