TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025088084
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023202534
出願日
2023-11-30
発明の名称
検出方法、ロボットシステムおよびプログラム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/08 20060101AFI20250604BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡単な構成で振動成分を取得することができる検出方法、ロボットシステムおよびプログラムを提供すること。
【解決手段】モーターを有するロボットアームの所定部位の振動を検出する検出方法であって、モーターの出力トルクのトルク値の経時変化である第1トルク情報を取得する第1ステップと、第1トルク情報から、所定部位をモーターにより加速させる成分に対応するトルク値の経時変化である第2トルク情報を除去して、振動成分のトルク値の経時変化である第3トルク情報を取得する第2ステップと、を含むことを特徴とする検出方法。
【選択図】図7
特許請求の範囲
【請求項1】
モーターを有するロボットアームの所定部位の振動を検出する検出方法であって、
前記モーターの出力トルクのトルク値の経時変化である第1トルク情報を取得する第1ステップと、
前記第1トルク情報から、前記所定部位を前記モーターにより加速させる成分に対応するトルク値の経時変化である第2トルク情報を除去して、振動成分のトルク値の経時変化である第3トルク情報を取得する第2ステップと、を含むことを特徴とする検出方法。
続きを表示(約 640 文字)
【請求項2】
前記第2ステップでは、前記第1トルク情報のトルク値の経時変化を平坦化することにより前記第2トルク情報を取得する請求項1に記載の検出方法。
【請求項3】
前記第3トルク情報に基づいて振動特性を分析する第3ステップを有する請求項1または2に記載の検出方法。
【請求項4】
前記第3ステップでは、前記第3トルク情報におけるトルク値の振幅を求める請求項3に記載の検出方法。
【請求項5】
前記第3ステップでは、前記トルク値の最大値に基づいて、前記振幅を求める請求項4に記載の検出方法。
【請求項6】
前記第3ステップでは、前記第3トルク情報におけるトルク値の周波数を求める請求項3に記載の検出方法。
【請求項7】
前記第3ステップでは、前記第3トルク情報におけるトルク値の周波数分析を行い、前記周波数分析の計算値の最大値を前記周波数とする請求項6に記載の検出方法。
【請求項8】
前記周波数分析を行う際に、前記振動の振幅が最も大きくなる条件で、前記第1トルク情報を取得する請求項7に記載の検出方法。
【請求項9】
前記周波数分析を行う際に、予め定められた周波数域のデータを除外する請求項7に記載の検出方法。
【請求項10】
前記周波数分析を行う前に、ノイズ成分を除去する請求項7に記載の検出方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、検出方法、ロボットシステムおよびプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載されているロボットは、ロボットアームを有し、このロボットアームを所望の姿勢となるように駆動してワークに対し、例えば、搬送、組立および検査等の作業を行う。また、ロボットアームの先端部には、加速度センサーが設けられている。加速度センサーが検出し、出力する情報に基づいてロボットアームの振動を検出する。この振動を相殺するような駆動信号を生成してロボットアームを駆動することにより、振動を抑制しつつロボットアームを駆動する、いわゆる制振制御を行うことができる。
【先行技術文献】
【特許文献】
【0003】
特開2021-13999号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載されている構成では、加速度センサー等の物理的な振動検出装置を設ける必要があり、装置の構成が複雑化、大型化してしまう他、ロボットアームの慣性重量、特にロボットアームの先端部の慣性重量が増大し、ロボットアームの迅速な駆動にとって不利となるという問題がある。
【0005】
本発明の検出方法は、モーターを有するロボットアームの所定部位の振動を検出する検出方法であって、
前記モーターの出力トルクのトルク値の経時変化である第1トルク情報を取得する第1ステップと、
前記第1トルク情報から、前記所定部位を前記モーターにより加速させる成分に対応するトルク値の経時変化である第2トルク情報を除去して、振動成分のトルク値の経時変化である第3トルク情報を取得する第2ステップと、を含む。
【0006】
本発明のロボットシステムは、モーターを有するロボットアームを備えるロボットと、
前記モーターを駆動して前記ロボットアームの作動を制御する制御装置と、を備え、
前記制御装置は、前記モーターの出力トルクのトルク値の経時変化である第1トルク情報を取得し、前記第1トルク情報から、前記ロボットアームの所定部位を前記モーターにより加速させる成分に対応するトルク値の経時変化である第2トルク情報を除去して、振動成分のトルク値の経時変化である第3トルク情報を取得するトルク情報取得部を有する。
【0007】
本発明のプログラムは、モーターを有するロボットアームの所定部位の振動を検出するためのプログラムであって、
前記モーターの出力トルクのトルク値の経時変化である第1トルク情報を取得する第1ステップと、
前記第1トルク情報から、前記所定部位を前記モーターにより加速させる成分に対応するトルク値の経時変化である第2トルク情報を除去して、振動成分のトルク値の経時変化である第3トルク情報を取得する第2ステップと、を実行するためのものである。
【図面の簡単な説明】
【0008】
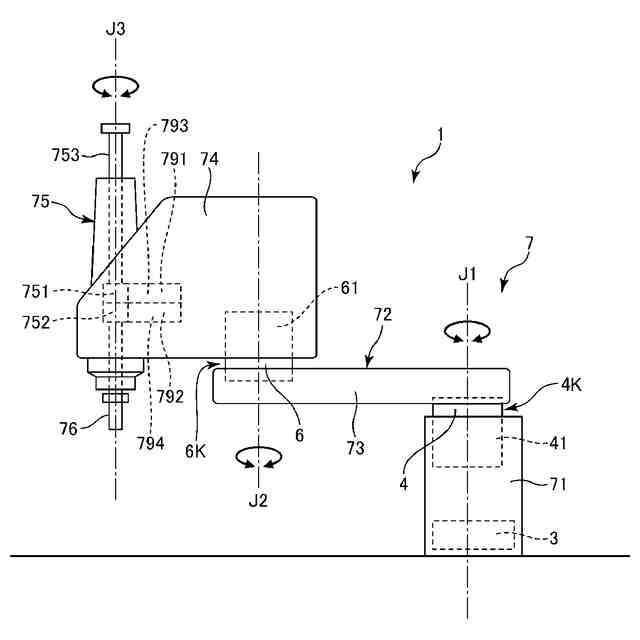
本発明の実施形態に係るロボットシステムの概略構成図である。
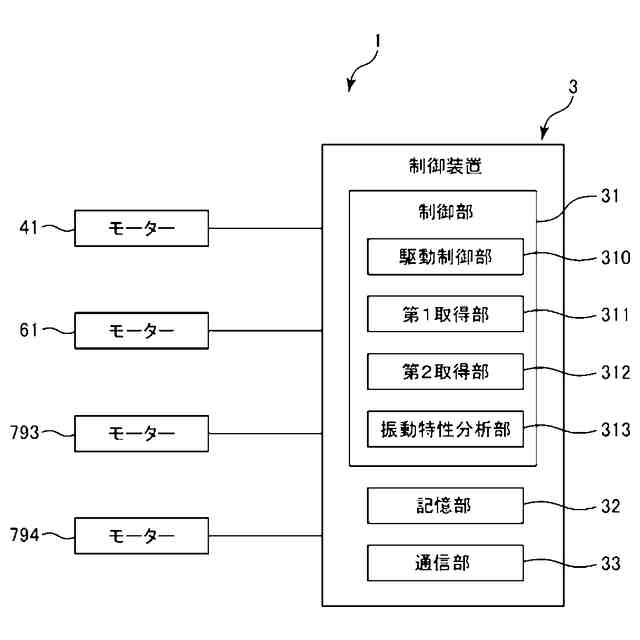
図1に示すロボットシステムのブロック図である。
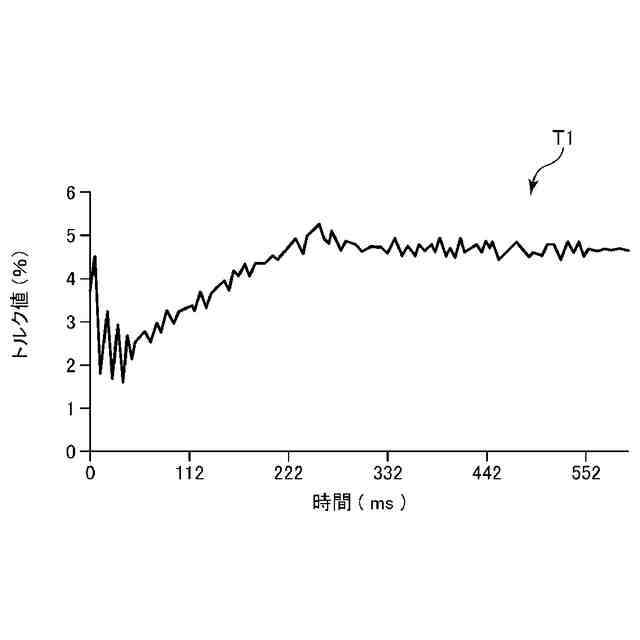
第1トルク情報の一例を示すグラフである。
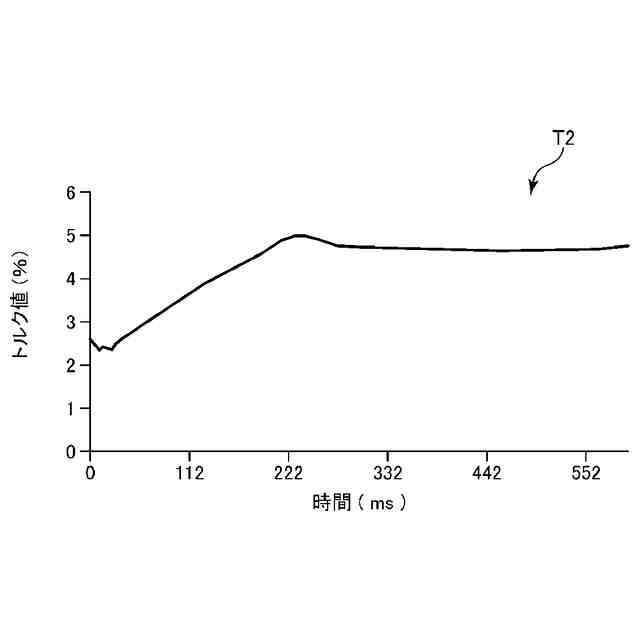
第2トルク情報の一例を示すグラフである。
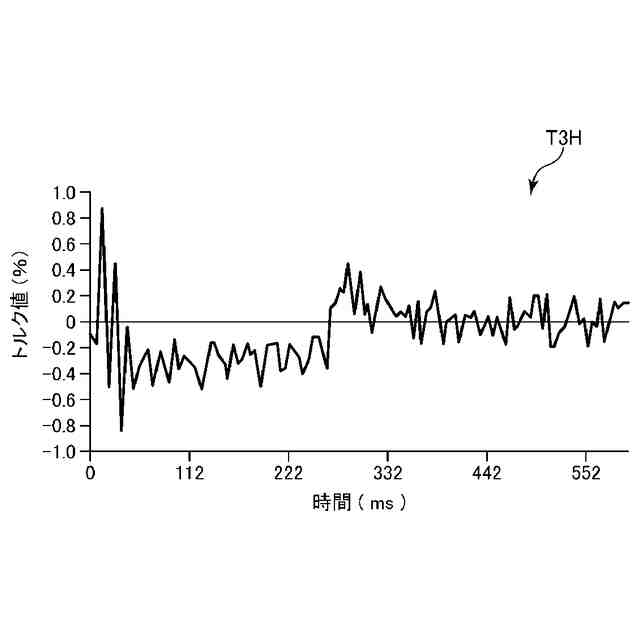
第3トルク情報の一例を示すグラフである。
補正第3トルク情報の一例を示すグラフである。
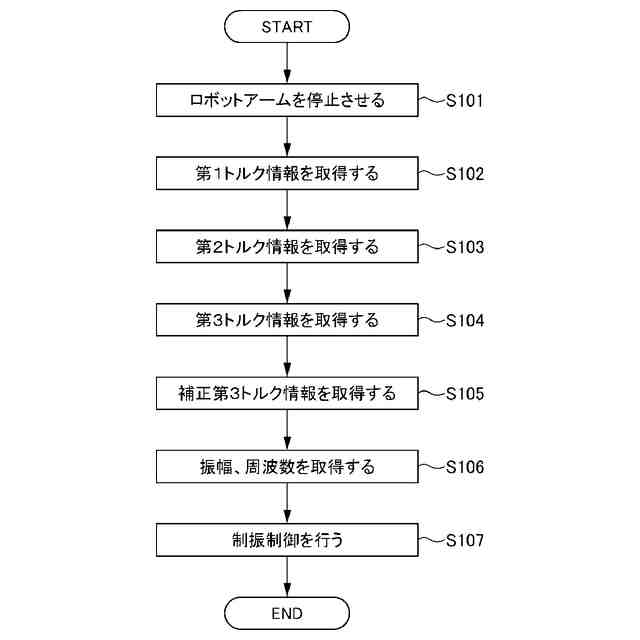
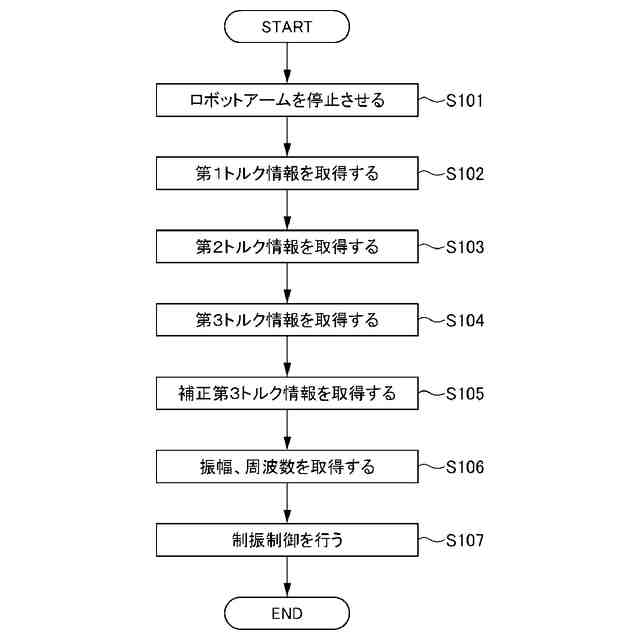
本発明の実施形態に係る検出方法の一例を説明するためのフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の検出方法、ロボットシステムおよびプログラムを添付図面に示す実施形態に基づいて詳細に説明する。
【0010】
<実施形態>
図1は、本発明の実施形態に係るロボットシステムの概略構成図である。図2は、図1に示すロボットシステムのブロック図である。図3は、第1トルク情報の一例を示すグラフである。図4は、第2トルク情報の一例を示すグラフである。図5は、第3トルク情報の一例を示すグラフである。図6は、補正第3トルク情報の一例を示すグラフである。図7は、本発明の実施形態に係る検出方法の一例を説明するためのフローチャートである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
2か月前
日東精工株式会社
電動ドライバ
14日前
株式会社クレスコ
補助吸着具
1か月前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
19日前
株式会社ダイヘン
移動体
17日前
株式会社エビス
腰ベルト用連結具
2か月前
東京都公立大学法人
対象物把持装置
28日前
株式会社スター精機
吸着パッド
13日前
株式会社スター精機
吸着パッド
13日前
学校法人五島育英会
アーム機構
19日前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
5日前
住友重機械工業株式会社
ロボット
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社PILLAR
チューブ保持治具
24日前
庄内機械株式会社
釘打装置
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
11日前
オークラ輸送機株式会社
ハンド装置
27日前
芝浦機械株式会社
双腕ロボット
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
株式会社マキタ
電動作業機
20日前
株式会社マキタ
電動作業機
20日前
株式会社リコー
多関節ロボット
18日前
株式会社安川電機
ロボット
11日前
株式会社安川電機
ロボット
11日前
株式会社ジャノメ
ロボット
7日前
株式会社安川電機
ロボット
11日前
株式会社ダイヘン
ロボット制御システム
17日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































