TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087505
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023202206
出願日
2023-11-29
発明の名称
半導体装置、切替方法、およびプログラム
出願人
ルネサスエレクトロニクス株式会社
代理人
個人
主分類
H02P
6/16 20160101AFI20250603BHJP(電力の発電,変換,配電)
要約
【課題】モータ内部の巻線に過電流が流れることを防止できる半導体装置、切替方法、およびプログラムを提供する。
【解決手段】
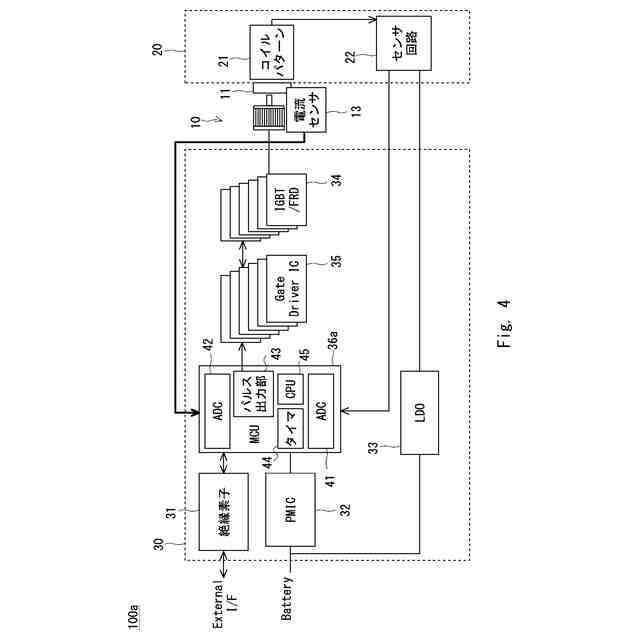
半導体装置100aは、モータ10内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定部363と、判定部363の判定結果に基づいて、モータ10の制御モードを切り替える切替部364とを備える。
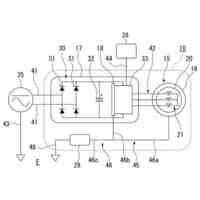
【選択図】図4
特許請求の範囲
【請求項1】
モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定部と、
前記判定部の判定結果に基づいて、前記モータの制御モードを切り替える切替部と
を備えた半導体装置。
続きを表示(約 1,100 文字)
【請求項2】
前記切替部は、前記電流値が前記閾値を超えると判定された場合、前記制御モードを矩形波制御モードからPWM(Pulse Width Modulation)制御モードに切り替える
請求項1に記載の半導体装置。
【請求項3】
前記切替部は、前記電流値が前記閾値を超えないと判定された場合、前記制御モードを前記PWM制御モードから前記矩形波制御モードに切り替える
請求項2に記載の半導体装置。
【請求項4】
前記巻線にかかる電圧を生成する複数のスイッチング素子と、
各スイッチング素子のゲートを駆動するゲートドライバと、
前記モータの回転角度を測定するIPS(Inductive Position Sensor)と、
前記制御モードおよび前記回転角度に基づいて前記ゲートドライバの動作を制御する制御部と
を備える請求項2に記載の半導体装置。
【請求項5】
前記判定部は、タイマで生成されたタイミングが、前記電流値が増加する第1の期間内となるか否かを判定し、前記タイミングが前記第1の期間内である場合、前記電流値が前記閾値を超えるか否かを判定する
請求項4に記載の半導体装置。
【請求項6】
前記インダクタンス値および前記抵抗値に基づいて、前記電流値の単位時間あたりの増加量を算出する算出部を備え、
前記判定部は、前記電流値を測定する電流センサの測定結果、および前記単位時間あたりの増加量に基づいて前記電流値が前記閾値を超えるか否かを判定する
請求項1に記載の半導体装置。
【請求項7】
前記判定部は、前記モータの回転速度が所定速度を超える場合、前記電流値が前記閾値を超えるか否かを判定する
請求項2に記載の半導体装置。
【請求項8】
モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定ステップと、
前記判定ステップの判定結果に基づいて、前記モータの制御モードを切り替える切替ステップと
を含む切替方法。
【請求項9】
モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定処理と、
前記判定処理の判定結果に基づいて、前記モータの制御モードを切り替える切替処理と
をコンピュータに実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータの制御モードを切り替える半導体装置、切替方法、およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
車載用のモータの小型化、高効率化を実現するため、モータを高速で回転させる必要がある。特許文献1には、モータを高速で回転させる場合に矩形波制御モードを用いることが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-188609号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータを高速で回転させた場合、モータ内部の巻線に過電流が流れる可能性があるという問題がある。
【0005】
その他の課題と新規な特徴は、本明細書の記述および添付図面から明らかになるであろう。
【課題を解決するための手段】
【0006】
一実施の形態による半導体装置は、モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定部と、前記判定部の判定結果に基づいて、前記モータの制御モードを切り替える切替部とを備える。
【0007】
一実施の形態による切替方法は、モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定ステップと、前記判定ステップの判定結果に基づいて、前記モータの制御モードを切り替える切替ステップとを含む。
【0008】
一実施の形態によるプログラムは、モータ内部の巻線のインダクタンス値および抵抗値の少なくともいずれかに基づいて、前記巻線の電流値が一定時間後に閾値を超えるか否かを判定する判定処理と、前記判定処理の判定結果に基づいて、前記モータの制御モードを切り替える切替処理とをコンピュータに実行させる。
【発明の効果】
【0009】
前記一実施の形態によれば、モータ内部の巻線に過電流が流れることを防止できる半導体装置、切替方法、およびプログラムを提供できる。
【図面の簡単な説明】
【0010】
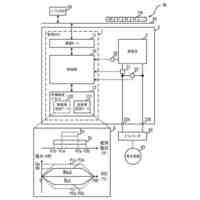
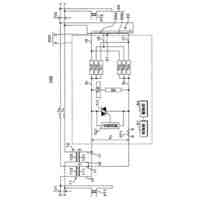
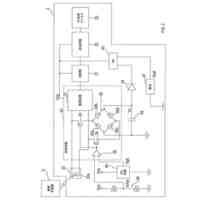
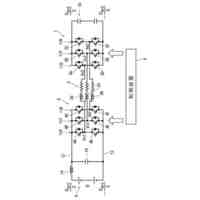
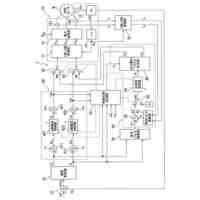
比較例にかかる半導体装置の構成を示すブロック図である。
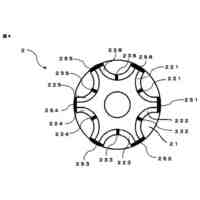
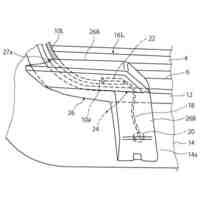
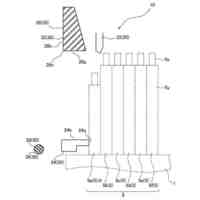
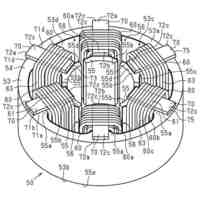
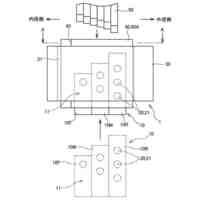
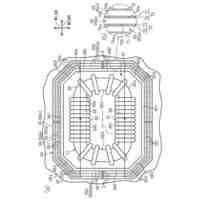
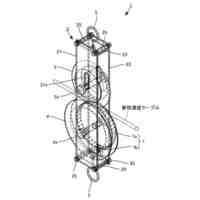
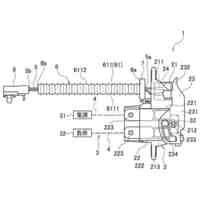
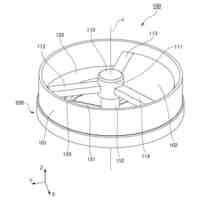
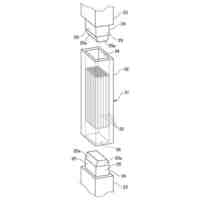
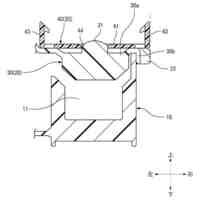
IPS(Inductive Position Sensor)の構成を示す斜視図である。
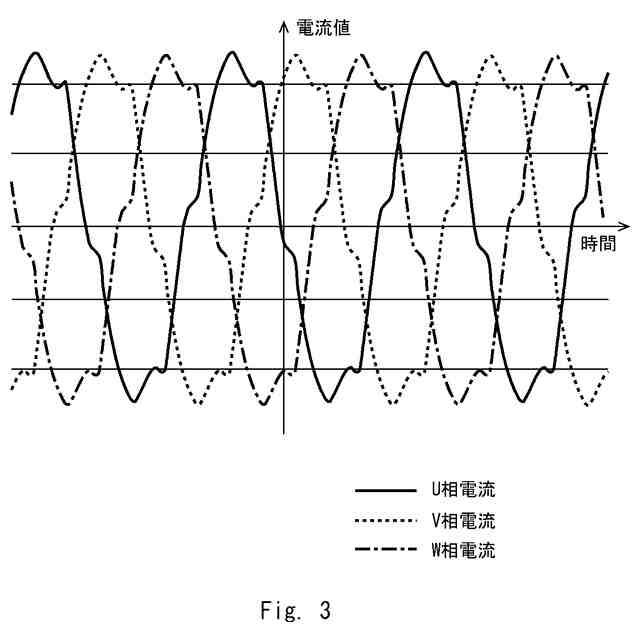
モータの各相の巻線の電流値の時間変化を示すグラフである。
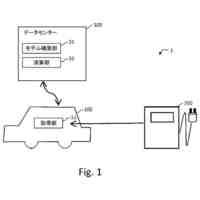
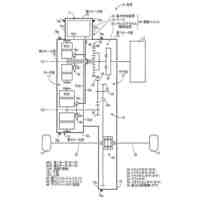
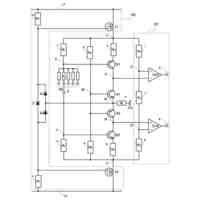
実施形態1にかかる半導体装置の構成を示すブロック図である。
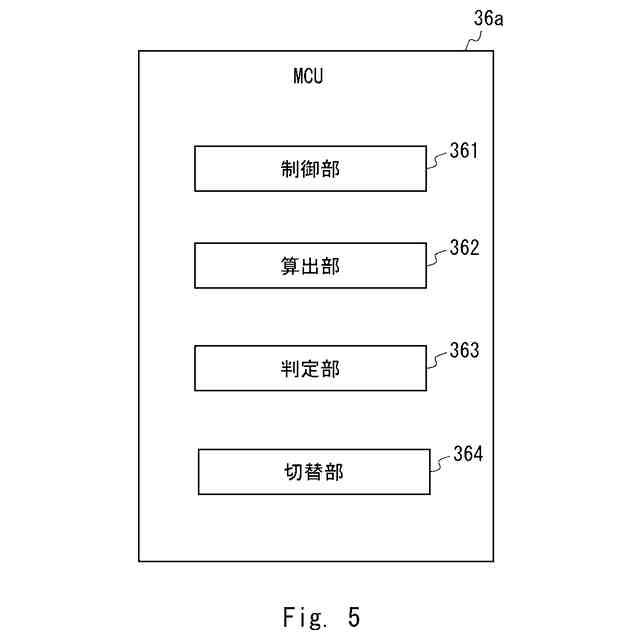
実施形態1にかかるMCU(Micro Controller Unit)の機能構成を示すブロック図である。
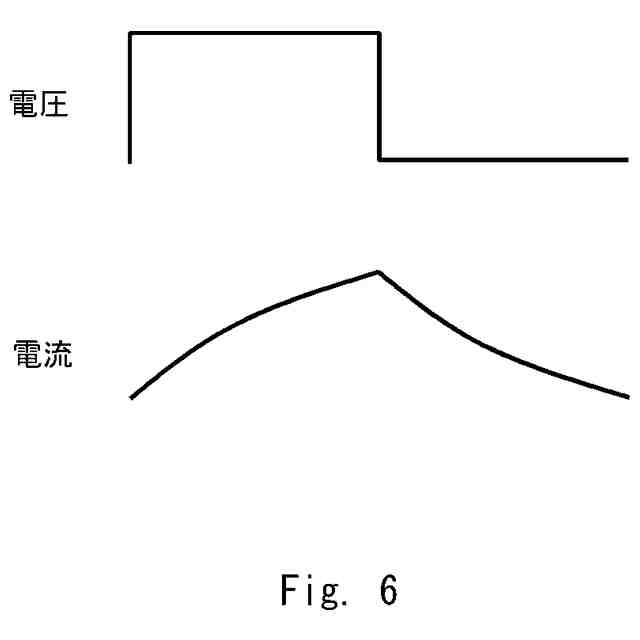
モータの巻線の電流値の時間変化を表すグラフである。
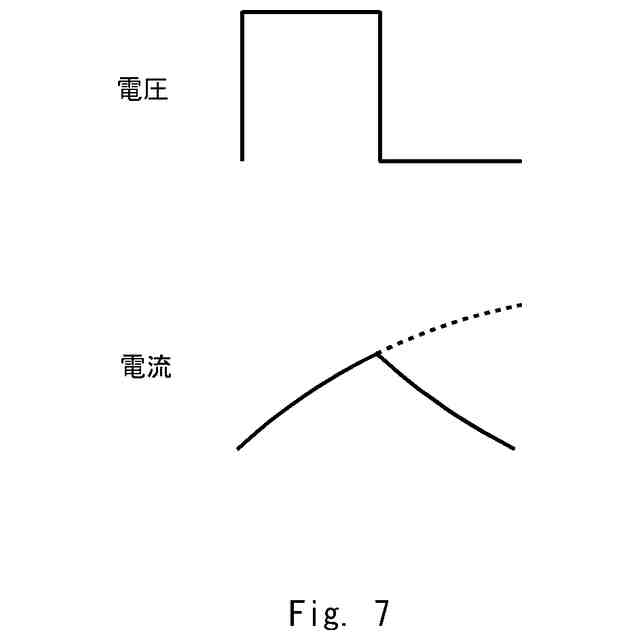
モータの巻線の電流値の時間変化を表すグラフである。
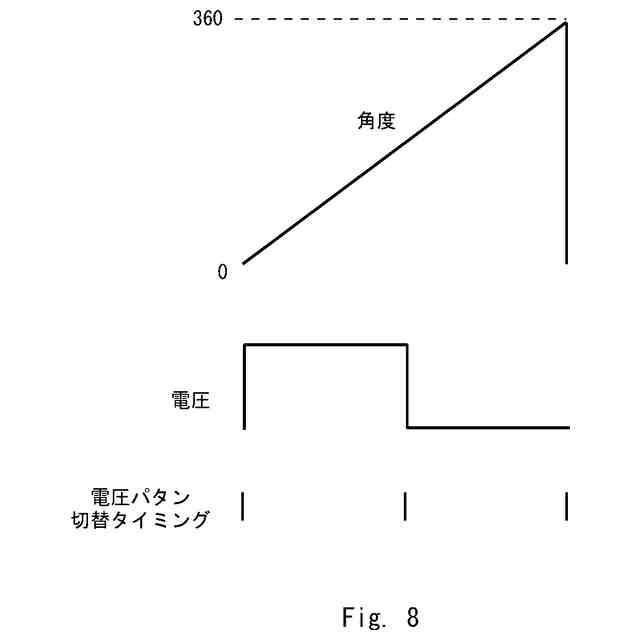
電圧を切り替えるタイミングを説明するための図である。
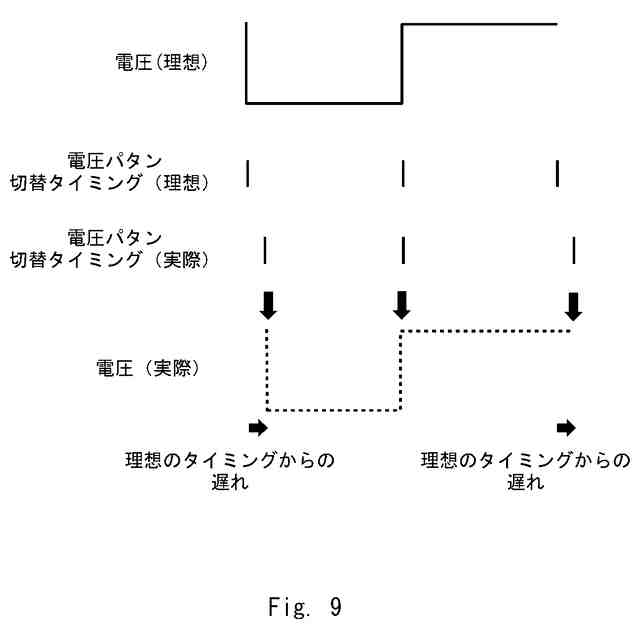
電圧を切り替えるタイミングの遅れを説明するための図である。
理想的な電流値の時間変化を説明するための図である。
実際の電流値の時間変化を説明するための図である。
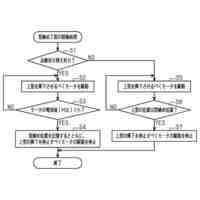
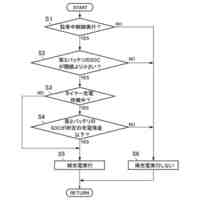
実施形態1にかかる半導体装置の動作の一例を示すフローチャートである。
実施形態1にかかる半導体装置の動作を説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
マグネデザイン株式会社
ロータ
22日前
株式会社豊田自動織機
モータ冷却装置
22日前
トヨタ自動車株式会社
予測方法
16日前
株式会社セイワ
車両用配線カバー
7日前
株式会社ダイヘン
充電装置
24日前
トヨタ自動車株式会社
電池制御装置
11日前
住友電装株式会社
電気接続箱
17日前
住友電装株式会社
電気接続箱
17日前
ダイハツ工業株式会社
曲げ加工装置
18日前
富士電機株式会社
リニアモータ
7日前
株式会社豊田自動織機
回転電機
3日前
株式会社ダイヘン
電圧調整装置
24日前
ダイハツ工業株式会社
コイル組付け装置
4日前
株式会社豊田自動織機
電動圧縮機
3日前
株式会社デンソー
携帯機
22日前
トヨタ自動車株式会社
駆動ユニット
14日前
株式会社力電
配線スペース低減型の切替盤
21日前
株式会社エフ・シー・シー
太陽光発電装置
7日前
トヨタ自動車株式会社
電磁鋼板の成形方法
23日前
北海道電力株式会社
延線金車
2日前
ナブテスコ株式会社
駆動装置
11日前
株式会社豊田自動織機
回転電機
3日前
矢崎総業株式会社
電線保護構造
24日前
トヨタ自動車株式会社
車両の制御装置
7日前
神崎産業株式会社
漏電検出装置
8日前
サンデン株式会社
電力変換装置
10日前
トヨタ紡織株式会社
ロータの製造方法
2日前
株式会社明電舎
ドローン
24日前
株式会社デンソー
電力変換装置
23日前
トヨタ自動車株式会社
車両の制御装置
21日前
株式会社デンソー
電力変換装置
23日前
トヨタ自動車株式会社
ステータ
18日前
株式会社アイシン
電力変換装置
16日前
株式会社富士通ゼネラル
モータ制御装置
8日前
ニデック株式会社
回転電機
2日前
矢崎総業株式会社
プロテクタ
10日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ