TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025087373
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201971
出願日
2023-11-29
発明の名称
モータグレーダを制御するためのシステムおよび方法
出願人
株式会社小松製作所
代理人
弁理士法人新樹グローバル・アイピー
主分類
E02F
9/20 20060101AFI20250603BHJP(水工;基礎;土砂の移送)
要約
【課題】モータグレーダの操作性を向上させる。
【解決手段】システムは、リフト操作部材と、センサと、コントローラとを備える。リフト操作部材は、リフトシリンダによってブレードを昇降させるために操作される。センサは、車体に対するブレードの実ピッチ角を取得する。コントローラは、車体の走行時に、リフト操作部材が、所定の継続時間以上操作された後に、中立位置に戻った場合に、リフトシリンダを制御して、ブレードを所定の目標位置まで上昇、又は下降させる自動ブレード制御を実行する。コントローラは、車体に対するブレードの実ピッチ角を取得する。コントローラは、目標位置に応じた車体に対するブレードの目標ピッチ角を取得する。コントローラは、自動ブレード制御において、実ピッチ角が目標ピッチ角となるように、実ピッチ角に応じて実ピッチ角の変化速度を制御する。
【選択図】図14
特許請求の範囲
【請求項1】
モータグレーダを制御するためのシステムであって、
前記モータグレーダは、
走行輪を含む車体と、
前記車体に対して動作可能に接続され、ブレードを含む作業機と、
前記作業機に接続され、前記ブレードを昇降させるリフトシリンダと、
前記システムは、
前記リフトシリンダによって前記ブレードを昇降させるために操作されるリフト操作部材と、
前記車体に対する前記ブレードの実ピッチ角を取得するセンサと、
前記リフト操作部材の操作に応じた信号を受信可能なコントローラと、
を備え、
前記コントローラは、
前記車体の走行時に、前記リフト操作部材が、所定の継続時間以上操作された後に、中立位置に戻った場合に、前記リフトシリンダを制御して、前記ブレードを所定の目標位置まで上昇、又は下降させる自動ブレード制御を実行し、
前記車体に対する前記ブレードの実ピッチ角を取得し、
前記目標位置に応じた前記車体に対する前記ブレードの目標ピッチ角を取得し、
前記自動ブレード制御において、前記実ピッチ角が前記目標ピッチ角となるように、前記実ピッチ角に応じて前記実ピッチ角の変化速度を制御する、
システム。
続きを表示(約 1,200 文字)
【請求項2】
前記コントローラは、前記実ピッチ角が、所定の減速開始点から前記目標ピッチ角までの間、前記実ピッチ角の変化速度を減速させる、
請求項1に記載のシステム。
【請求項3】
オペレータによって操作可能な入力装置をさらに備え、
前記コントローラは、前記入力装置への操作に応じて、前記目標位置を設定する、
請求項1に記載のシステム。
【請求項4】
前記コントローラは、
前記作業機の姿勢を取得し、
前記作業機の姿勢が所定のリスク姿勢である場合には、前記自動ブレード制御を禁止する、
請求項1に記載のシステム。
【請求項5】
前記自動ブレード制御は、自動ブレード上げ制御を含み、
前記自動ブレード上げ制御において、前記コントローラは、前記車体の後進時に、前記リフト操作部材が、所定の第1継続時間以上ブレード上げ操作された後に、中立位置に戻った場合に、前記リフトシリンダを制御して、前記ブレードを所定の目標上昇位置まで上昇させる、
請求項1に記載のシステム。
【請求項6】
前記コントローラは、前記自動ブレード上げ制御中に、前記リフト操作部材が、ブレード下げ操作された場合には、前記自動ブレード上げ制御をキャンセルする、
請求項5に記載のシステム。
【請求項7】
前記コントローラは、前記自動ブレード上げ制御中に、前記リフト操作部材が、ブレード上げ操作された場合には、前記自動ブレード上げ制御を一時停止し、前記リフト操作部材が中立位置に戻った場合に、前記自動ブレード上げ制御を再開する、
請求項5に記載のシステム。
【請求項8】
前記自動ブレード制御は、自動ブレード下げ制御を含み、
前記自動ブレード下げ制御において、前記コントローラは、前記車体の前進時に、前記リフト操作部材が、所定の第2継続時間以上ブレード下げ操作された後に、中立位置に戻った場合に、前記リフトシリンダを制御して、前記ブレードを所定の目標下降位置まで下降させる、
請求項1に記載のシステム。
【請求項9】
前記コントローラは、前記自動ブレード下げ制御中に、前記左リフト操作部材、又は、前記右リフト操作部材が、ブレード上げ操作された場合には、前記自動ブレード下げ制御をキャンセルする、
請求項8に記載のシステム。
【請求項10】
前記コントローラは、前記自動ブレード下げ制御中に、前記左リフト操作部材、又は、前記右リフト操作部材が、ブレード下げ操作された場合には、前記自動ブレード下げ制御を一時停止し、前記左リフト操作部材、又は、前記右リフト操作部材が中立位置に戻った場合に、前記自動ブレード下げ制御を再開する、
請求項8に記載のシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、モータグレーダを制御するためのシステムおよび方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
モータグレーダは、ブレードと、リフトシリンダと、リフト操作部材とを備えている。リフトシリンダは、ブレードを昇降させる。リフト操作部材は、リフトシリンダによってブレードを昇降させるために操作される。
【先行技術文献】
【特許文献】
【0003】
特開2021-054269号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータグレーダは、ブレードを地面近くに配置し、前進して整地や地ならしを行った後、ブレードを上昇させて後進し、再び前進して整地や地ならし作業を繰り返すという作業を行う場合がある。このような場合、後進時のブレードの上げ操作または前進時のブレードの下げ操作と、ステアリング操作などの他の操作とをオペレータが同時に行うことは容易ではない。本開示の目的は、モータグレーダの操作性を向上させることにある。
【課題を解決するための手段】
【0005】
本開示の一態様に係るシステムは、モータグレーダを制御するためのシステムである。モータグレーダは、車体と、作業機と、リフトシリンダとを含む。車体は、走行輪を含む。作業機は、車体に対して動作可能に接続され、ブレードを含む。リフトシリンダは、作業機に接続され、ブレードを昇降させる。当該システムは、リフト操作部材と、センサと、コントローラとを備える。リフト操作部材は、リフトシリンダによってブレードを昇降させるために操作される。センサは、車体に対するブレードの実ピッチ角を取得する。コントローラは、リフト操作部材の操作に応じた信号を受信可能である。コントローラは、車体の走行時に、リフト操作部材が、所定の継続時間以上操作された後に、中立位置に戻った場合に、リフトシリンダを制御して、ブレードを所定の目標位置まで上昇、又は下降させる自動ブレード制御を実行する。コントローラは、車体に対するブレードの実ピッチ角を取得する。コントローラは、目標位置に応じた車体に対するブレードの目標ピッチ角を取得する。コントローラは、自動ブレード制御において、実ピッチ角が目標ピッチ角となるように、実ピッチ角に応じて実ピッチ角の変化速度を制御する。
【0006】
本開示の他の態様に係る方法は、モータグレーダを制御するための方法である。モータグレーダは、車体と、作業機と、リフトシリンダとを含む。車体は、走行輪を含む。作業機は、車体に対して動作可能に接続され、ブレードを含む。リフトシリンダは、作業機に接続され、ブレードを昇降させる。当該方法は、リフトシリンダによってブレードを昇降させるために操作されるリフト操作部材の操作に応じた信号を受信することと、車体の走行時に、リフト操作部材が、所定の継続時間以上操作された後に、中立位置に戻った場合に、リフトシリンダを制御して、ブレードを所定の目標位置まで上昇、又は下降させる自動ブレード制御を実行することと、車体に対するブレードの実ピッチ角を取得することと、目標位置に応じた車体に対するブレードの目標ピッチ角を取得することと、自動ブレード制御において、実ピッチ角が目標ピッチ角となるように、実ピッチ角に応じて実ピッチ角の変化速度を制御すること、を備える。
【発明の効果】
【0007】
本開示によれば、車体の走行時に、オペレータによって、リフト操作部材が、所定の継続時間以上、操作された後で中立位置に戻ることで、自動ブレード制御により、ブレードが自動的に目標位置まで移動する。そのため、ステアリング操作などの他の操作が容易になる。また、ブレードの実ピッチ角の変化速度は、実ピッチ角に応じて制御される。そのため、ブレードを、迅速、且つ、精度よく目標位置まで上昇させることができる。それにより、モータグレーダの操作性が向上する。
【図面の簡単な説明】
【0008】
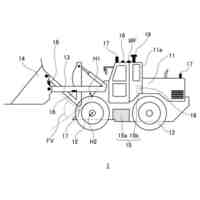
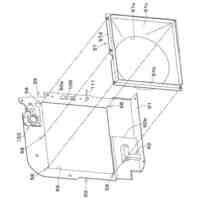
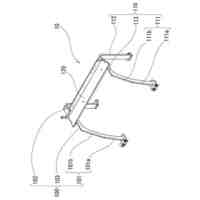
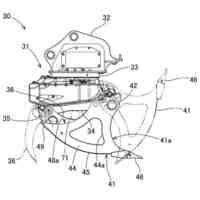
実施形態に係るモータグレーダの斜視図である。
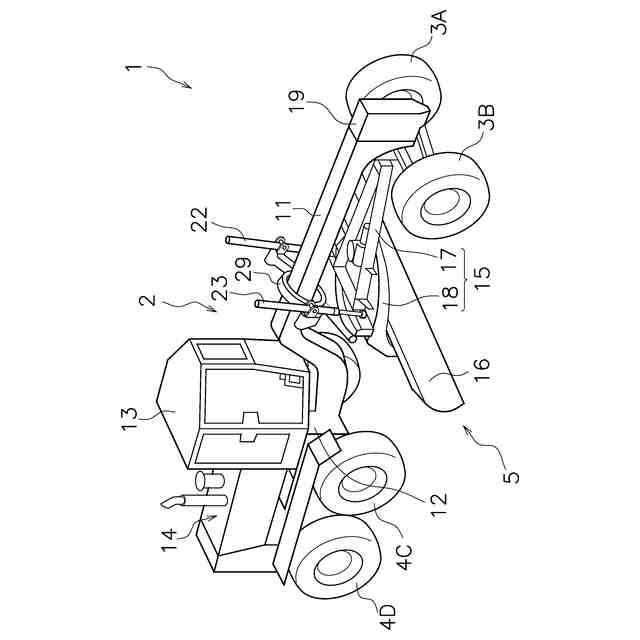
モータグレーダの側面図である。
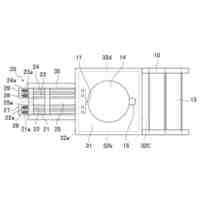
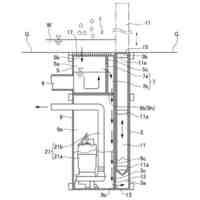
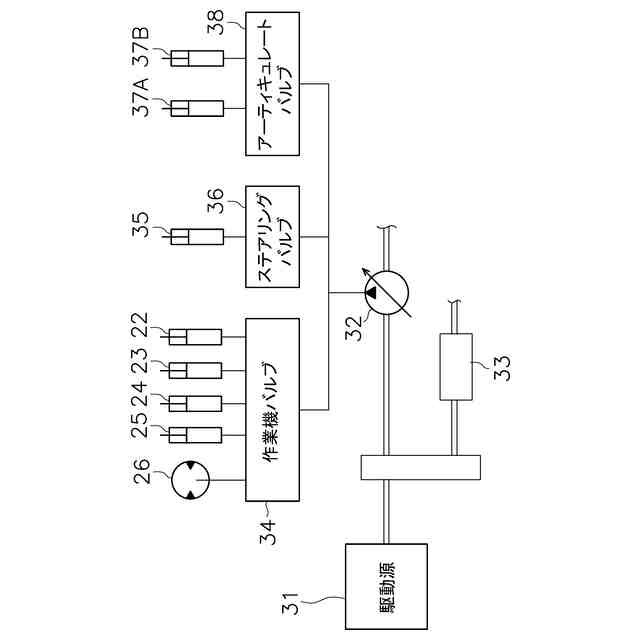
モータグレーダの駆動系を示す模式図である。
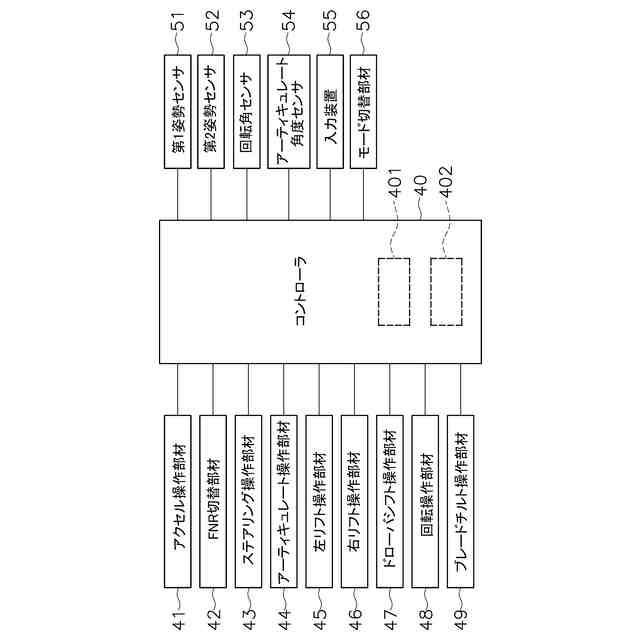
モータグレーダの制御系を示す模式図である。
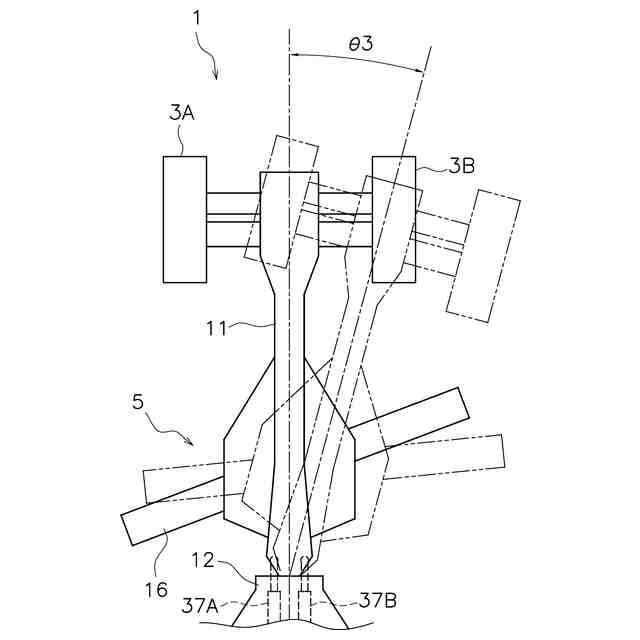
モータグレーダのアーティキュレート動作を示す上面図である。
モータグレーダのアーティキュレート動作を示す上面図である。
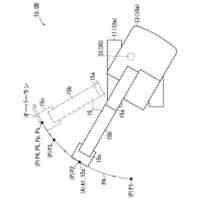
車体に対するブレードのピッチ角を示すモータグレーダの側面図である。
ブレードの回転角を示すモータグレーダの上面図である。
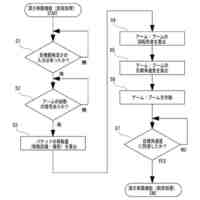
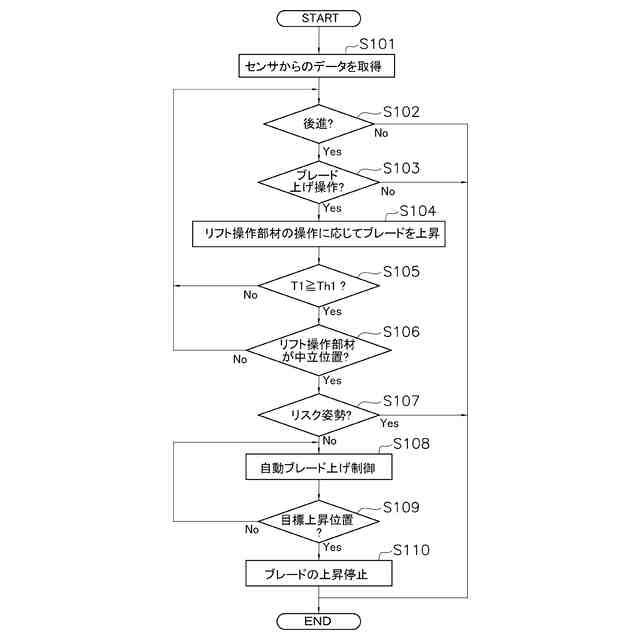
自動ブレード上げ制御の処理を示すフローチャートである。
後進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
後進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
後進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
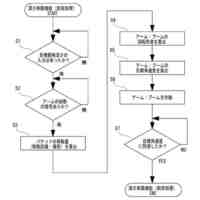
自動ブレード下げ制御の処理を示すフローチャートである。
前進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
前進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
前進時におけるリフト操作部材の操作と、ブレードの制御とを示す図である。
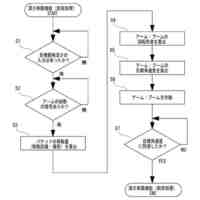
自動ブレード制御におけるリフトシリンダの制御の処理を示すフローチャートである。
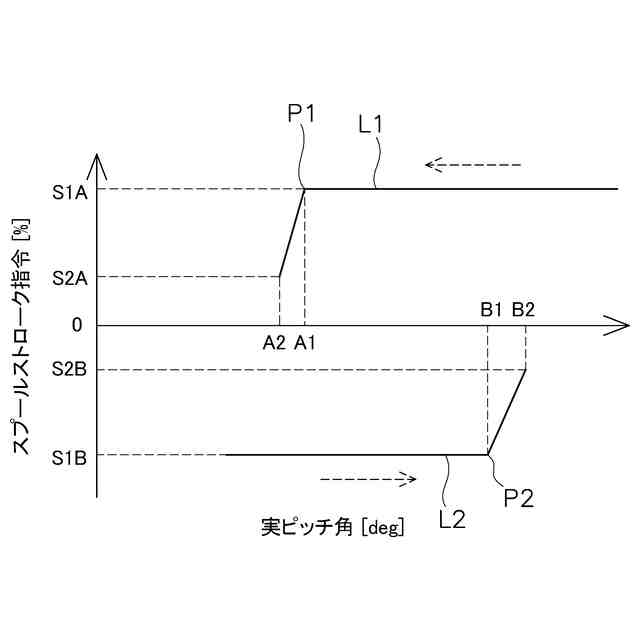
スプールストローク-実ピッチ角データの一例を示す図である。
【発明を実施するための形態】
【0009】
以下図面を参照して、本開示の実施形態について説明する。図1は、実施形態に係るモータグレーダ1の斜視図である。図2は、モータグレーダ1の側面図である。図1に示すように、モータグレーダ1は、車体2と、複数の走行輪3A,3B,4A-4Dと、作業機5とを備える。車体2は、フロントフレーム11と、リアフレーム12と、キャブ13と、動力室14とを含む。複数の走行輪3A,3B,4A-4Dは、前輪3A,3Bと、後輪4A-4Dとを含む。
【0010】
リアフレーム12は、フロントフレーム11に接続されている。フロントフレーム11は、リアフレーム12に対して、左右にアーティキュレート可能である。キャブ13と動力室14とは、リアフレーム12上に配置されている。キャブ13には、図示しない運転席が配置されている。動力室14は、キャブ13の後方に配置されている。フロントフレーム11は、リアフレーム12から前方へ延びている。前輪3A,3Bは、フロントフレーム11に取り付けられている。後輪4A-4Dは、リアフレーム12に取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
26日前
戸田建設株式会社
覆土材
10日前
戸田建設株式会社
緑化覆土材
10日前
株式会社大林組
作業機械
6日前
株式会社大林組
人工地盤構造
19日前
株式会社竹中工務店
建物の基礎構造
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
19日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
4日前
株式会社プラント・ツリース
杭基礎構造
25日前
鹿島建設株式会社
設備架台の施工方法
26日前
株式会社大林組
山留め工事の支援方法
4日前
個人
狭小水域浚渫システムおよび方法
25日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
18日前
前田工繊株式会社
救助用ネット装置
10日前
鹿島建設株式会社
杭施工方法
26日前
強化土エンジニヤリング株式会社
地盤強化工法
11日前
日立建機株式会社
作業機械
11日前
ヒロセ株式会社
支持杭と受桁の接合構造
10日前
コベルコ建機株式会社
作業機械
18日前
ノザキ建工株式会社
鋼管杭
20日前
大豊建設株式会社
ケーソン刃口下部の掘削除去装置
6日前
株式会社大林組
物体の設置方法
26日前
株式会社アイガー産業
止水装置
25日前
ノザキ建工株式会社
鋼管杭
20日前
コベルコ建機株式会社
ブレーキ制御システム
4日前
コベルコ建機株式会社
目標軌道設定システム
4日前
イワフジ工業株式会社
掘削グラップル装置及び油圧ショベル
25日前
株式会社本久
土石流対策工構造、土石流対策工構築方法
10日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ