TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089091
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023204075
出願日
2023-12-01
発明の名称
目標軌道設定システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/22 20060101AFI20250605BHJP(水工;基礎;土砂の移送)
要約
【課題】アクチュエータに要求される能力が、特定の能力範囲の範囲外となる目標軌道が設定された場合でも、目標とする経路と、対象物の実際の動きと、の乖離を抑制する。
【解決手段】コントローラ70は、アクチュエータ30の能力の特定の範囲である特定能力範囲A1を設定し、目標軌道に従ってアクチュエータ30が対象物OBを動かすために要求されるアクチュエータ30の能力である要求能力A2を算出する。コントローラ70は、要求能力A2が特定能力範囲A1の範囲外である場合、修正後の要求能力A2が特定能力範囲A1に収まるように、目標経路PAを変更することなく目標速度Vを修正する制御である、目標速度修正制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械に搭載されるアクチュエータと、
前記アクチュエータに動かされる対象物と、
前記アクチュエータを制御するコントローラと、
を備え、
前記コントローラは、
前記対象物の目標経路の情報および前記対象物の目標速度の情報を含む、目標軌道を設定し、
前記アクチュエータの能力の特定の範囲である特定能力範囲を設定し、
前記目標軌道に従って前記アクチュエータが前記対象物を動かすために要求される前記アクチュエータの能力である要求能力を算出し、
前記要求能力が前記特定能力範囲の範囲外である場合、修正後の前記要求能力が前記特定能力範囲に収まるように、前記目標経路を変更することなく前記目標速度を修正する制御である目標速度修正制御を行う、
目標軌道設定システム。
続きを表示(約 760 文字)
【請求項2】
請求項1に記載の目標軌道設定システムであって、
前記コントローラは、前記要求能力が前記特定能力範囲よりも大きい場合、修正後の前記要求能力が前記特定能力範囲に収まるように、前記目標速度を遅くする、
目標軌道設定システム。
【請求項3】
請求項1に記載の目標軌道設定システムであって、
前記コントローラは、前記要求能力が前記特定能力範囲よりも小さい場合、修正後の前記要求能力が前記特定能力範囲に収まるように、前記目標速度を速くする、
目標軌道設定システム。
【請求項4】
請求項1に記載の目標軌道設定システムであって、
前記要求能力は、前記目標軌道に従って前記アクチュエータが前記対象物を動かすために要求される前記対象物の加速度である要求加速度であり、
前記特定能力範囲の最大値は、前記アクチュエータが前記対象物に作用させることが可能な最大の加速度である出力最大加速度であり、
前記コントローラは、前記対象物の慣性情報、および、前記アクチュエータの最大出力の情報に基づいて、前記出力最大加速度を算出する、
目標軌道設定システム。
【請求項5】
請求項1に記載の目標軌道設定システムであって、
前記目標速度が修正されたことを作業者に通知する出力部を備える、
目標軌道設定システム。
【請求項6】
請求項1に記載の目標軌道設定システムであって、
前記コントローラは、前記アクチュエータの出力を制限する制御である出力制限制御を行う場合に、前記出力制限制御で修正される前記アクチュエータの出力に基づいて、前記目標速度を修正する、
目標軌道設定システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の目標軌道を設定する目標軌道設定システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
例えば特許文献1に、作業機械の動きが、作業計画(目標軌道)に基づいて制御される技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-118445号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
目標軌道においてアクチュエータに要求される能力が、特定の能力範囲(例えばアクチュエータが出力できる最大能力以下の範囲など)の範囲外になるおそれがある。この場合、目標とする経路と、アクチュエータが動かす対象物の実際の動きと、に乖離が発生してしまう。
【0005】
そこで、本発明は、アクチュエータに要求される能力が、特定の能力範囲の範囲外となる目標軌道が設定された場合でも、目標とする経路と、対象物の実際の動きと、の乖離を抑制することができる、目標軌道設定システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
目標軌道設定システムは、アクチュエータと、対象物と、コントローラと、を備える。前記アクチュエータは、作業機械に搭載される。前記対象物は、前記アクチュエータに動かされる。前記コントローラは、前記アクチュエータを制御する。前記コントローラは、目標軌道を設定する。前記目標軌道は、前記対象物の目標経路の情報、および、前記対象物の目標速度の情報を含む。前記コントローラは、前記アクチュエータの能力の特定の範囲である特定能力範囲を設定する。前記コントローラは、前記目標軌道に従って前記アクチュエータが前記対象物を動かすために要求される前記アクチュエータの能力である要求能力を算出する。前記コントローラは、目標速度修正制御を行う。前記目標速度修正制御は、前記要求能力が前記特定能力範囲の範囲外である場合、修正後の前記要求能力が前記特定能力範囲に収まるように、前記目標経路を変更することなく前記目標速度を修正する制御である。
【発明の効果】
【0007】
上記の目標軌道設定システムにより、アクチュエータに要求される能力が、特定の能力範囲の範囲外となる目標軌道が設定された場合でも、目標軌道と、対象物の実際の動きと、の乖離を抑制することができる。
【図面の簡単な説明】
【0008】
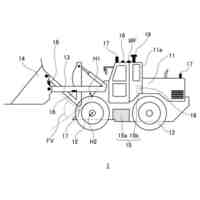
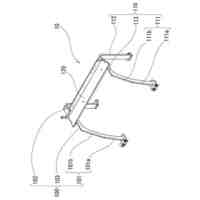
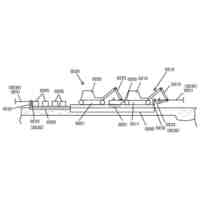
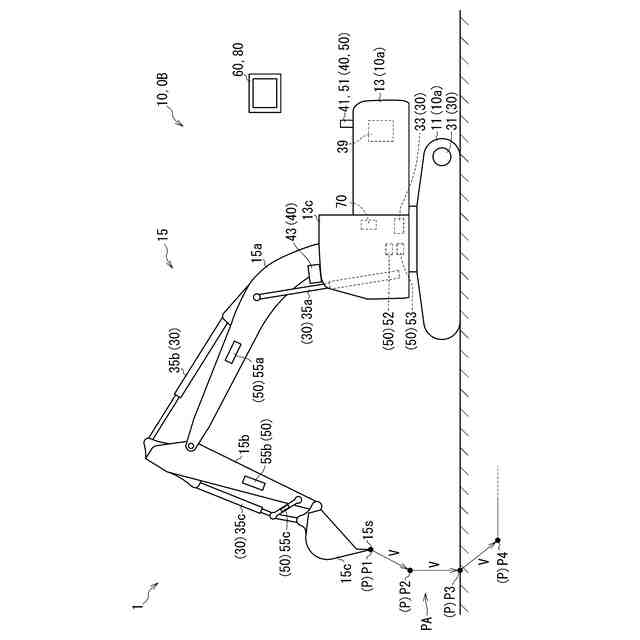
目標軌道設定システム1の作業機械10を横から見た図である。
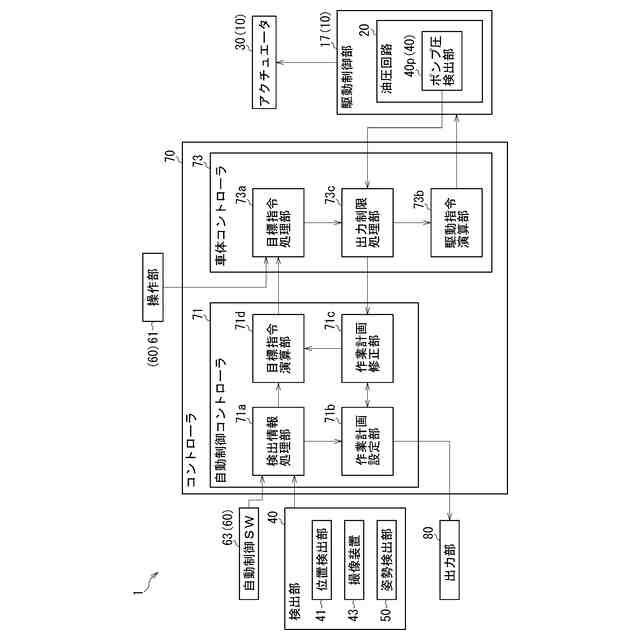
目標軌道設定システム1のブロック図である。
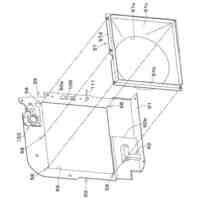
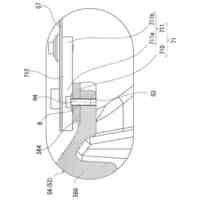
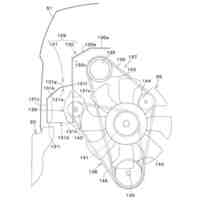
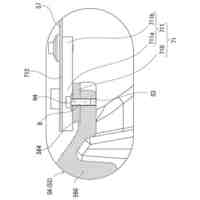
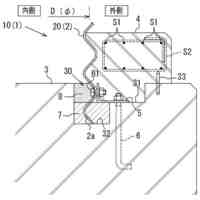
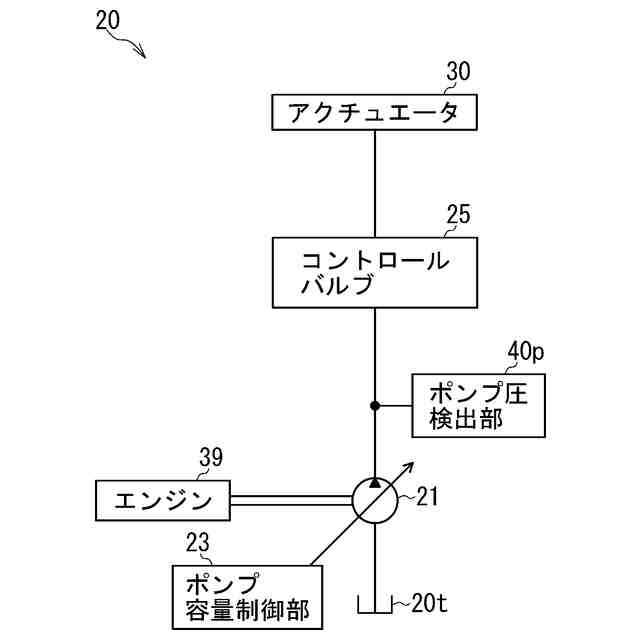
図2に示す油圧回路20などを示す図である。
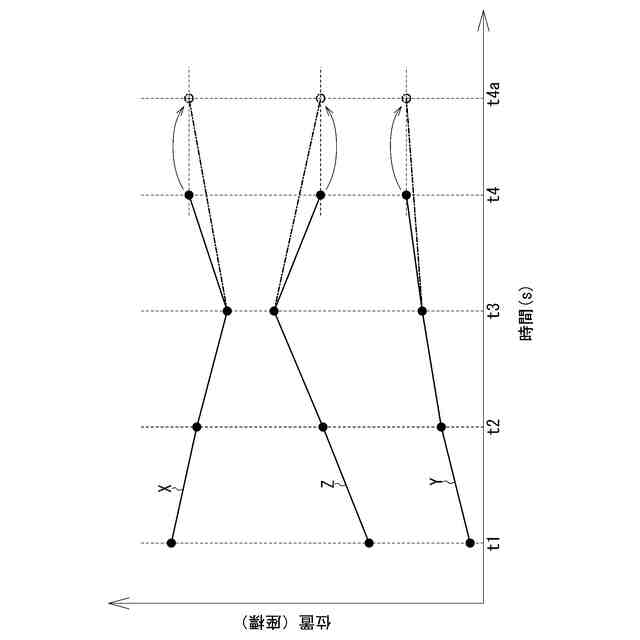
図2に示す作業計画設定部71bが設定した作業計画などの位置と時間との関係を示すグラフである。
図1に示すアクチュエータ30の特定能力範囲A1と要求能力A2との関係を示す図である。
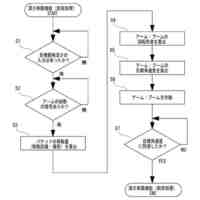
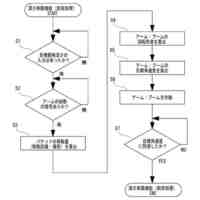
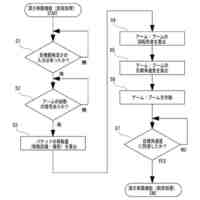
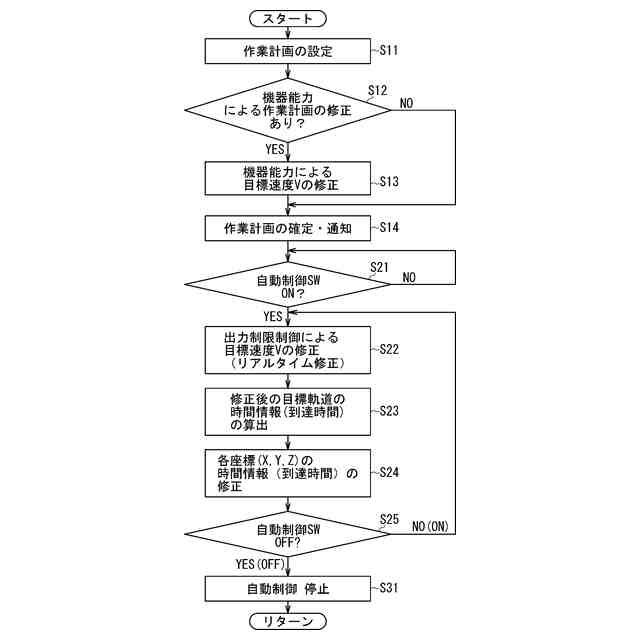
図2に示すコントローラ70の処理のフローチャートである。
【発明を実施するための形態】
【0009】
図1~図6を参照して、目標軌道設定システム1について説明する。
【0010】
目標軌道設定システム1は、図1に示す作業機械10(対象物OB)の目標軌道を設定するシステムである。目標軌道設定システム1はアクチュエータ30の速度特性を制御する。目標軌道設定システム1は、作業機械10と、検出部40(図2参照)と、入力部60と、コントローラ70と、出力部80と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
23日前
戸田建設株式会社
覆土材
7日前
戸田建設株式会社
緑化覆土材
7日前
株式会社大林組
作業機械
3日前
株式会社大林組
人工地盤構造
16日前
株式会社竹中工務店
建物の基礎構造
1日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
16日前
株式会社クボタ
作業機
1日前
株式会社クボタ
作業機
1日前
越後商事株式会社
ツース盤
25日前
株式会社プラント・ツリース
杭基礎構造
22日前
鹿島建設株式会社
設備架台の施工方法
23日前
株式会社大林組
山留め工事の支援方法
1日前
個人
狭小水域浚渫システムおよび方法
22日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
15日前
前田工繊株式会社
救助用ネット装置
7日前
鹿島建設株式会社
杭施工方法
23日前
強化土エンジニヤリング株式会社
地盤強化工法
8日前
コベルコ建機株式会社
作業機械
15日前
日立建機株式会社
作業機械
8日前
ヒロセ株式会社
支持杭と受桁の接合構造
7日前
ノザキ建工株式会社
鋼管杭
17日前
株式会社大林組
物体の設置方法
23日前
ノザキ建工株式会社
鋼管杭
17日前
株式会社アイガー産業
止水装置
22日前
大豊建設株式会社
ケーソン刃口下部の掘削除去装置
3日前
個人
建物基礎の立ち上がり基礎工事に使用されるパネル式捨て型枠
24日前
コベルコ建機株式会社
ブレーキ制御システム
1日前
コベルコ建機株式会社
目標軌道設定システム
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ