TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087071
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201447
出願日
2023-11-29
発明の名称
ロボット制御方法、ロボットシステムおよびロボットコントローラー
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250603BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】一動作中においても制御モードを切り替えることができ、利便性の高いロボット制御方法、ロボットシステムおよびロボットコントローラーを提供すること。
【解決手段】ロボット制御方法は、ロボットを動作させる制御モードとして、前記ロボットに接続されているロボットコントローラーが生成する内部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる内部制御モードと、前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる外部制御モードと、を有し、前記ロボットコントローラーは、前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替える。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットを動作させる制御モードとして、
前記ロボットに接続されているロボットコントローラーが生成する内部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる外部制御モードと、を有し、
前記ロボットコントローラーは、前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替えることを特徴とするロボット制御方法。
続きを表示(約 1,500 文字)
【請求項2】
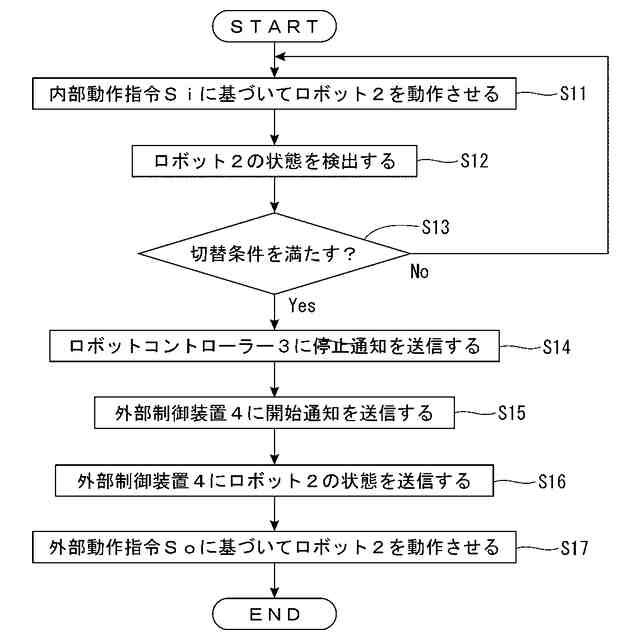
前記切替条件を満たし、前記内部制御モードから前記外部制御モードに切り替えるとき、
前記ロボットコントローラーに、前記内部制御モードに基づく前記ロボットの動作の停止通知を送信し、
前記外部制御装置に、前記切り替え時の前記ロボットの状態を送信する請求項1に記載のロボット制御方法。
【請求項3】
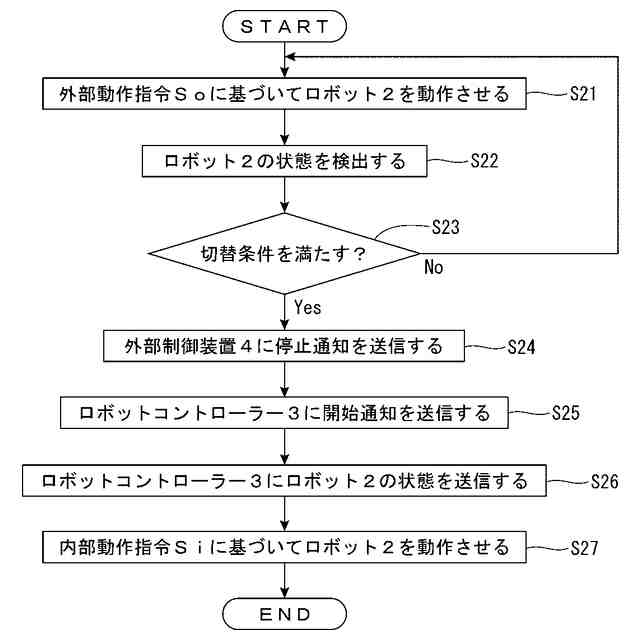
前記切替条件を満たし、前記外部制御モードから前記内部制御モードに切り替えるとき、
前記外部制御装置に、前記外部制御モードに基づく前記ロボットの動作の停止通知を送信し、
前記ロボットコントローラーに、前記切り替え時の前記ロボットの状態を送信する請求項1に記載のロボット制御方法。
【請求項4】
前記ロボットは、ロボットアームを有し、
前記ロボットアームの先端の位置が所定領域内に位置する場合に前記切替条件を満たす請求項1に記載のロボット制御方法。
【請求項5】
前記ロボットは、ロボットアームを有し、
前記ロボットアームの先端の速度または加速度が所定値の範囲内である場合に前記切替条件を満たす請求項1に記載のロボット制御方法。
【請求項6】
前記ロボットは、ロボットアームを有し、
前記ロボットアームが動作中に特異姿勢となることが推定される場合に前記切替条件を満たす請求項1に記載のロボット制御方法。
【請求項7】
前記ロボットは、ロボットアームを有し、
前記外部制御モードで前記ロボットを動作させている最中に、前記ロボットアームの先端の速度または加速度が許容値を超えた場合に前記切替条件を満たす請求項1に記載のロボット制御方法。
【請求項8】
前記内部制御モードに切り替えた後、前記ロボットを停止させるか、前記ロボットアームの先端の速度または加速度を低下させる請求項7に記載のロボット制御方法。
【請求項9】
ロボットと、
前記ロボットに接続されているロボットコントローラーと、を有し、
前記ロボットコントローラーは、前記ロボットの駆動を制御する制御モードとして、
前記ロボットコントローラーが生成する内部動作指令に基づいて前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットを動作させる外部制御モードと、を有し、
前記ロボットコントローラーは、前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替えることを特徴とするロボットシステム。
【請求項10】
ロボットに接続されるロボットコントローラーであって、
前記ロボットの駆動を制御する制御モードとして、
前記ロボットコントローラーが生成する内部動作指令に基づいて前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットを動作させる外部制御モードと、を有し、
前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替えることを特徴とするロボットコントローラー。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御方法、ロボットシステムおよびロボットコントローラーに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載されたロボットの制御装置では、内部制御プログラムに基づいてロボットを制御する内部モードと、外部制御プログラムに基づいてロボットを制御する外部モードと、を選択することができる。このような構成とすることにより、ロボットの制御形態をユーザーのニーズに応じて多様化させることを可能としている。
【先行技術文献】
【特許文献】
【0003】
特開2022-183820号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のロボットの制御装置では、ロボットの動作中に内部モードと外部モードとを切り替える場合について何ら考慮されていない。ユーザーの使い方によっては、ロボットの動作中に内部モードと外部モードとを切り替えたい場合もあり、このような場合は、特許文献1のロボットの制御装置で対応することができない。したがって、高い利便性を発揮することができないという問題がある。
【課題を解決するための手段】
【0005】
本発明のロボット制御方法は、ロボットを動作させる制御モードとして、
前記ロボットに接続されているロボットコントローラーが生成する内部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットコントローラーが前記ロボットを動作させる外部制御モードと、を有し、
前記ロボットコントローラーは、前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替える。
【0006】
本発明のロボットシステムは、ロボットと、
前記ロボットに接続されているロボットコントローラーと、を有し、
前記ロボットコントローラーは、前記ロボットの駆動を制御する制御モードとして、
前記ロボットコントローラーが生成する内部動作指令に基づいて前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットを動作させる外部制御モードと、を有し、
前記ロボットコントローラーは、前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替える。
【0007】
本発明のロボットコントローラーは、ロボットに接続されるロボットコントローラーであって、
前記ロボットの駆動を制御する制御モードとして、
前記ロボットコントローラーが生成する内部動作指令に基づいて前記ロボットを動作させる内部制御モードと、
前記ロボットコントローラーを介して前記ロボットに接続されている外部制御装置が生成する外部動作指令に基づいて前記ロボットを動作させる外部制御モードと、を有し、
前記内部制御モードおよび前記外部制御モードの一方の前記制御モードで前記ロボットを動作させている最中、切替条件を満たす場合に、他方の前記制御モードに切り替える。
【図面の簡単な説明】
【0008】
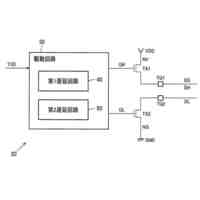
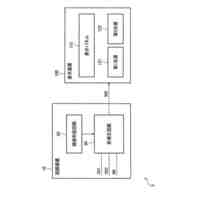
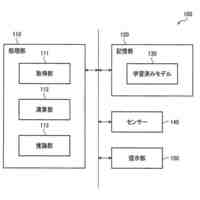
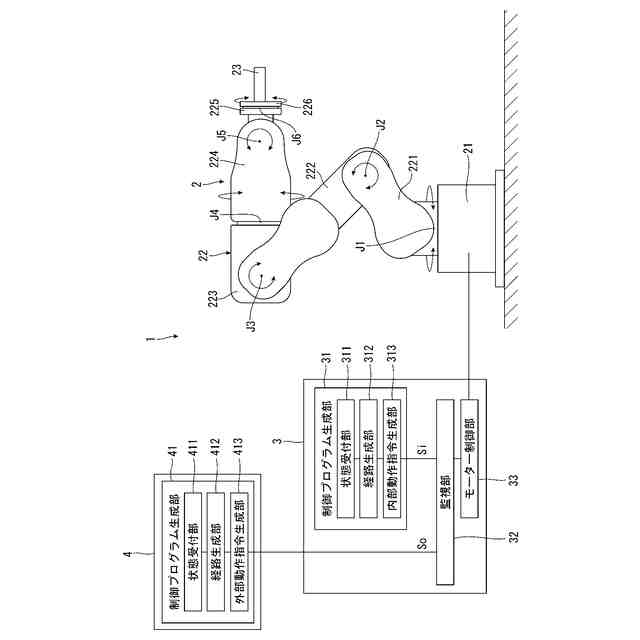
好適な実施形態に係るロボットシステムの全体図である。
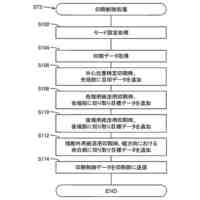
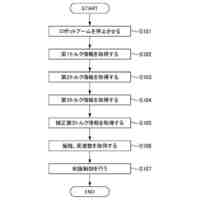
ロボットの制御方法を示すフローチャートである。
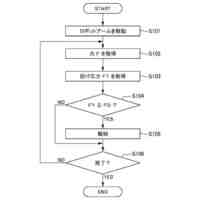
ロボットの制御方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明のロボット制御方法、ロボットシステムおよびロボットコントローラーを添付図面に示す実施形態に基づいて詳細に説明する。
【0010】
図1は、好適な実施形態に係るロボットシステムの全体図である。図2および図3は、それぞれ、ロボットの制御方法を示すフローチャートである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セイコーエプソン株式会社
回路装置
4日前
セイコーエプソン株式会社
虚像表示装置
4日前
セイコーエプソン株式会社
液体吐出装置
4日前
セイコーエプソン株式会社
液体吐出装置
4日前
セイコーエプソン株式会社
成形管理システム
4日前
セイコーエプソン株式会社
振動片及び振動デバイス
4日前
セイコーエプソン株式会社
印刷装置、及び、印刷方法
3日前
セイコーエプソン株式会社
回路装置及び表示システム
4日前
セイコーエプソン株式会社
インクセット及び記録方法
4日前
セイコーエプソン株式会社
二酸化炭素排出量の管理方法
3日前
セイコーエプソン株式会社
物理量センサー及び慣性計測装置
4日前
セイコーエプソン株式会社
巻取装置、及び印刷巻取システム
4日前
セイコーエプソン株式会社
位置決め方法、及び位置決めシステム
4日前
セイコーエプソン株式会社
処理システム、プログラム及び処理方法
5日前
セイコーエプソン株式会社
処理システム、プログラム及び処理方法
5日前
セイコーエプソン株式会社
触媒構造体および触媒構造体の製造方法
4日前
セイコーエプソン株式会社
触媒構造体および触媒構造体の製造方法
4日前
セイコーエプソン株式会社
圧電素子、液体吐出ヘッド、およびプリンター
4日前
セイコーエプソン株式会社
検出方法、ロボットシステムおよびプログラム
4日前
セイコーエプソン株式会社
検出方法、ロボットシステムおよびプログラム
4日前
セイコーエプソン株式会社
検出方法、ロボットシステムおよびプログラム
4日前
セイコーエプソン株式会社
シュレッダー、およびシュレッダーの制御方法
3日前
セイコーエプソン株式会社
古紙再生情報の管理方法、及び古紙再生システム
4日前
セイコーエプソン株式会社
古紙再生情報の管理方法、及び古紙再生システム
4日前
セイコーエプソン株式会社
データ取得方法、データ取得装置、および、プログラム
4日前
セイコーエプソン株式会社
圧電素子ユニット、圧電駆動装置、および圧電素子ユニットの製造方法
4日前
セイコーエプソン株式会社
集積回路装置、デバイス及び製造方法
5日前
セイコーエプソン株式会社
製品の要因分析に使用する説明変数を作成する方法、及び、コンピュータープログラム
3日前
日東精工株式会社
電動ドライバ
13日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
16日前
トヨタ自動車株式会社
関節機構
18日前
株式会社不二越
ロボット
1か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ