TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085435
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199311
出願日
2023-11-24
発明の名称
産業用ロボット及び産業用ロボットの制御方法
出願人
株式会社スター精機
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ダイレクトティーチングにおいて、作業者の意図した軌道で動作させることができる産業用ロボット及び産業用ロボットの制御方法を提供すること。
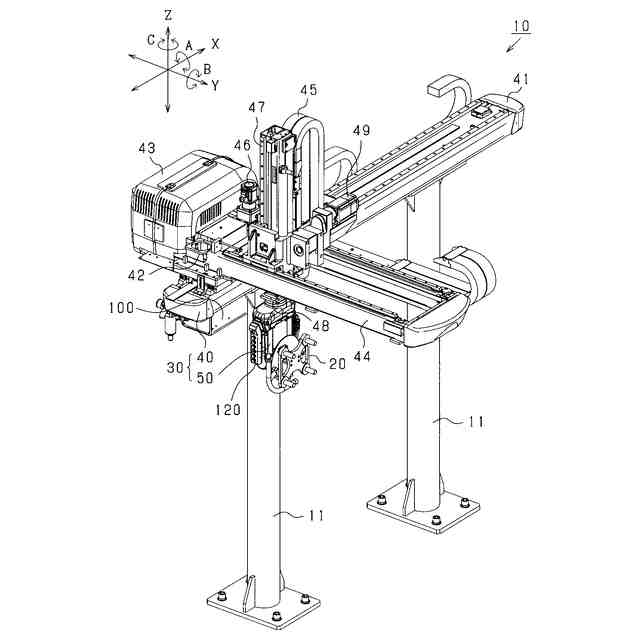
【解決手段】直交ロボット10は、ワークに対して予め決められた動作を実施するハンド部20が取り付けられるアーム先端部54と、アーム先端部54をスライド移動させるスライド駆動部40と、教示データに従って、アーム先端部54をスライド移動させるようにスライド駆動部40を制御する制御装置100と、を備える。制御装置100は、予め決められた教示期間中、アーム先端部54が動作した場合、その動作軌跡を教示データとして記憶するダイレクトティーチング処理を実行可能に構成されており、教示期間中、スライド軸毎に、アーム先端部54の移動許可及び移動規制のうちいずれかを設定する。
【選択図】 図5
特許請求の範囲
【請求項1】
2軸以上のスライド軸を有し、前記スライド軸同士が交差する産業用ロボットにおいて、
ワークに対して予め決められた動作を実施するロボットハンドが取り付けられるアーム先端部と、
それぞれの前記スライド軸に沿って前記アーム先端部をスライド移動させるスライド駆動部と、
予め記憶されている教示データに従って、前記アーム先端部をスライド移動させるように前記スライド駆動部を制御する制御部と、を備え、
前記制御部は、
予め決められた教示期間中、外部から加えられた力により前記アーム先端部が動作した場合、その動作軌跡を前記教示データとして記憶するダイレクトティーチング処理を実行可能に構成されており、
前記教示期間中、前記スライド軸毎に、前記アーム先端部の移動許可及び移動規制のうちいずれかを設定する、産業用ロボット。
続きを表示(約 2,000 文字)
【請求項2】
前記スライド軸毎に、前記アーム先端部の移動許可又は移動規制を選択し、前記制御部に指示する選択ボタンを有し、
前記選択ボタンは、前記スライド駆動部よりも前記アーム先端部の側に取り付けられ、前記アーム先端部とともに、前記スライド軸に沿ってスライド移動する、請求項1に記載の産業用ロボット。
【請求項3】
前記制御部は、
前記教示期間の設定前であって、前記アーム先端部が静止しているとき、前記スライド軸ごとに前記スライド駆動部において生じる保持トルクを測定し、
前記教示期間中、移動許可が設定された前記スライド軸において、前記スライド駆動部の発生トルクを、測定された保持トルクにより定められたトルク設定範囲内となるように前記スライド駆動部のトルク制御を行う、請求項1に記載の産業用ロボット。
【請求項4】
前記スライド駆動部と前記アーム先端部との間に設けられ、前記アーム先端部を回転させる回転駆動部を備え、
前記回転駆動部は、前記アーム先端部を回転させる回転軸を1又は複数有し、前記回転軸を中心として前記アーム先端部を1又は複数方向に回転させ、
前記制御部は、前記教示データに従って、前記アーム先端部を回転させるように前記回転駆動部を制御し、
前記制御部は、前記教示期間中、前記回転軸毎に、前記アーム先端部の回転許可及び回転規制のうちいずれかを設定する、請求項1に記載の産業用ロボット。
【請求項5】
前記回転軸毎に、回転許可又は回転規制を選択し、指示するための選択ボタンを有し、
前記選択ボタンは、前記スライド駆動部よりも前記アーム先端部の側に取り付けられ、前記アーム先端部とともに、前記スライド軸に沿ってスライド移動する、請求項4に記載の産業用ロボット。
【請求項6】
前記制御部は、
前記教示期間の設定前であって、前記アーム先端部が静止しているとき、前記回転軸ごとに前記回転駆動部において生じる保持トルクを測定し、
前記教示期間中、回転許可が設定された前記回転軸において、前記回転駆動部の発生トルクを、測定された保持トルクにより定められたトルク設定範囲内となるように前記回転駆動部のトルク制御を行う、請求項4に記載の産業用ロボット。
【請求項7】
ハンドルが前記アーム先端部又は前記ロボットハンドに取り付けられ、前記ハンドルを介して前記アーム先端部に外部からの力が加えられる、請求項1~6のうちいずれか1項に記載の産業用ロボット。
【請求項8】
前記ハンドルには、前記産業用ロボットの運転許可及び前記産業用ロボットの運転停止を指示するイネーブルスイッチが設けられている、請求項7に記載の産業用ロボット。
【請求項9】
前記ハンドルは、屈曲する棒状、又は円弧状に屈曲した棒状に形成され、
前記イネーブルスイッチは、前記ハンドルの先端に設けられており、
前記イネーブルスイッチの押込み方向は、前記ハンドルの先端が延びる方向と同じ方向である、請求項8に記載の産業用ロボット。
【請求項10】
スライド軸及び回転軸を有する産業用ロボットにおいて、
ワークに対して予め決められた動作を実施するロボットハンドが取り付けられるアーム先端部と、
前記スライド軸に沿って前記アーム先端部をスライド移動させるスライド駆動部と、
前記スライド駆動部と前記アーム先端部との間に設けられ、前記回転軸を中心にして前記アーム先端部を回転させる回転駆動部と、
予め記憶されている教示データに従って、前記アーム先端部をスライド移動させるように前記スライド駆動部を制御するとともに、前記アーム先端部を回転させるように前記回転駆動部を制御する制御部と、を備え、
前記スライド駆動部は、前記アーム先端部をスライド移動させるスライド軸を1又は複数有し、前記スライド軸に沿って前記アーム先端部を1又は複数方向に移動させるものであり、
前記回転駆動部は、前記アーム先端部を回転させる回転軸を1又は複数有し、前記回転軸を中心として前記アーム先端部を1又は複数方向に回転させるものであり、
前記制御部は、
予め決められた教示期間中、外部から加えられた力により前記アーム先端部が動作した場合、その動作軌跡を前記教示データとして記憶するダイレクトティーチング処理を実行可能に構成されており、
前記教示期間中、前記スライド軸毎に、前記アーム先端部の移動許可及び移動規制のうちいずれかを設定するとともに、前記回転軸毎に、前記アーム先端部の回転許可及び回転規制のうちいずれかを設定する、産業用ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット及び産業用ロボットの制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、多関節型ロボット等の産業用ロボットをティーチングする際には、ティーチングペンダント等の操作端末を用いて動作プログラムを作成する手法が採用されていた。しかしながら、このような手法ではロボットに対して直観的に指示を行うことができず、不慣れな作業者では所望の動きを実現するための時間が多大になるという問題があった。近年では、ティーチングの効率化等を実現すべく、ロボットを作業者が直接触って教示する手法(所謂ダイレクトティーチング)が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開平08-216074号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ダイレクトティーチングの問題点として、ロボットに動作の軌道を正確に覚えさせることが難しいというものがある。例えば、多関節ロボットなどにおいて、ワークを所定方向に真っすぐに移動させたい場合であっても、複数の関節を回転させる必要がある。このため、余計な力が加わってしまうと、作業者の思わぬ方向にアームやハンドが移動してしまい、真っすぐな軌道を覚えさせることが難しかった。特にアームやハンドが重い場合には、移動及び停止に力を要することから正確に移動させ、かつ、停止させることが困難であり、ダイレクトティーチングを難しくしていた。
【0005】
本発明は、上記事情に鑑みてなされたものであり、ダイレクトティーチングにおいて、作業者の意図した軌道で動作させることができる産業用ロボット及び産業用ロボットの制御方法を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、2軸以上のスライド軸を有し、前記スライド軸同士が交差する産業用ロボットにおいて、ワークに対して予め決められた動作を実施するロボットハンドが取り付けられるアーム先端部と、それぞれの前記スライド軸に沿って前記アーム先端部をスライド移動させるスライド駆動部と、予め記憶されている教示データに従って、前記アーム先端部をスライド移動させるように前記スライド駆動部を制御する制御部と、を備え、前記制御部は、予め決められた教示期間中、外部から加えられた力により前記アーム先端部が動作した場合、その動作軌跡を前記教示データとして記憶するダイレクトティーチング処理を実行可能に構成されており、前記教示期間中、前記スライド軸毎に、前記アーム先端部の移動許可及び移動規制のうちいずれかを設定する。
【0007】
スライド軸毎に移動許可及び移動規制を設定することができるため、任意のスライド軸に沿って真っすぐにアーム先端部をスライド移動させる軌道を容易に覚えさせることが可能となる。また、これに伴い、意図しない方向にアーム先端部が移動する可能性が少なくなり、安全性を向上することができる。
【0008】
上記課題を解決するための第2の手段は、スライド軸及び回転軸を有する産業用ロボットにおいて、ワークに対して予め決められた動作を実施するロボットハンドが取り付けられるアーム先端部と、前記スライド軸に沿って前記アーム先端部をスライド移動させるスライド駆動部と、前記スライド駆動部と前記アーム先端部との間に設けられ、前記回転軸を中心にして前記アーム先端部を回転させる回転駆動部と、予め記憶されている教示データに従って、前記アーム先端部をスライド移動させるように前記スライド駆動部を制御するとともに、前記アーム先端部を回転させるように前記回転駆動部を制御する制御部と、を備え、前記スライド駆動部は、前記アーム先端部をスライド移動させるスライド軸を1又は複数有し、前記スライド軸に沿って前記アーム先端部を1又は複数方向に移動させるものであり、前記回転駆動部は、前記アーム先端部を回転させる回転軸を1又は複数有し、前記回転軸を中心として前記アーム先端部を1又は複数方向に回転させるものであり、前記制御部は、予め決められた教示期間中、外部から加えられた力により前記アーム先端部が動作した場合、その動作軌跡を前記教示データとして記憶するダイレクトティーチング処理を実行可能に構成されており、前記教示期間中、前記スライド軸毎に、前記アーム先端部の移動許可及び移動規制のうちいずれかを設定するとともに、前記回転軸毎に、前記アーム先端部の回転許可及び回転規制のうちいずれかを設定する。
【0009】
スライド軸毎に移動許可及び移動規制を設定し、回転軸毎に回転許可及び回転規制を設定することができるため、任意のスライド軸に沿って真っすぐにアーム先端部をスライド移動させる軌道や、任意の回転軸を中心として回転させる軌道を容易に覚えさせることが可能となる。また、これに伴い、意図しない方向にアーム先端部が移動又は回転する可能性が少なくなり、安全性を向上することができる。
【0010】
上記課題を解決するための第3の手段は、2軸以上のスライド軸を有し、前記スライド軸同士が交差する産業用ロボットであって、ワークに対して予め決められた動作を実施するロボットハンドが取り付けられるアーム先端部と、それぞれの前記スライド軸に沿って前記アーム先端部をスライド移動させるスライド駆動部と、予め記憶されている教示データに従って、前記アーム先端部をスライド移動させるように前記スライド駆動部を制御する制御部と、を備える産業用ロボットの制御方法において、前記制御部は、予め決められた教示期間中、外部から加えられた力により前記アーム先端部が動いた場合、その動作軌跡を前記教示データとして記憶するダイレクトティーチング処理を実行し、前記教示期間中、前記スライド軸毎に、前記アーム先端部の移動許可及び移動規制のうちいずれかを設定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
23日前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
関節機構
2か月前
個人
ペグハンマおよびペグハンマ用部品
27日前
住友重機械工業株式会社
教示装置
20日前
株式会社ダイヘン
搬送装置
27日前
川崎重工業株式会社
ロボット
21日前
東京都公立大学法人
対象物把持装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
20日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
20日前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
住友重機械工業株式会社
支援装置
27日前
住友重機械工業株式会社
支援装置
27日前
庄内機械株式会社
釘打装置
2か月前
ホシデン株式会社
分解用治具
27日前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
29日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電気機器
21日前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社マキタ
電動作業機
2か月前
株式会社マキタ
電動作業機
2か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社リコー
多関節ロボット
27日前
工機ホールディングス株式会社
作業機
23日前
トヨタ自動車東日本株式会社
搬送治具
2か月前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































