TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085282
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199052
出願日
2023-11-24
発明の名称
シミュレーションシステム、シミュレーション方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
19/418 20060101AFI20250529BHJP(制御;調整)
要約
【課題】自律型の搬送機が導入される生産ラインの流れを精度良くシミュレート可能な技術を提供する。
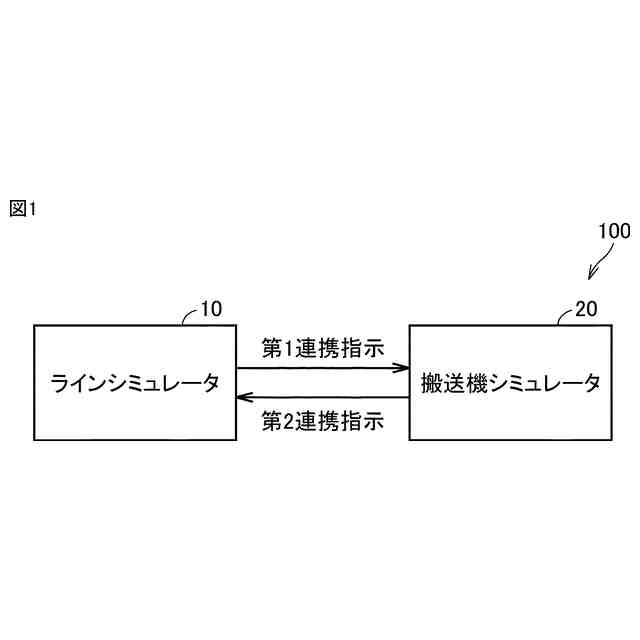
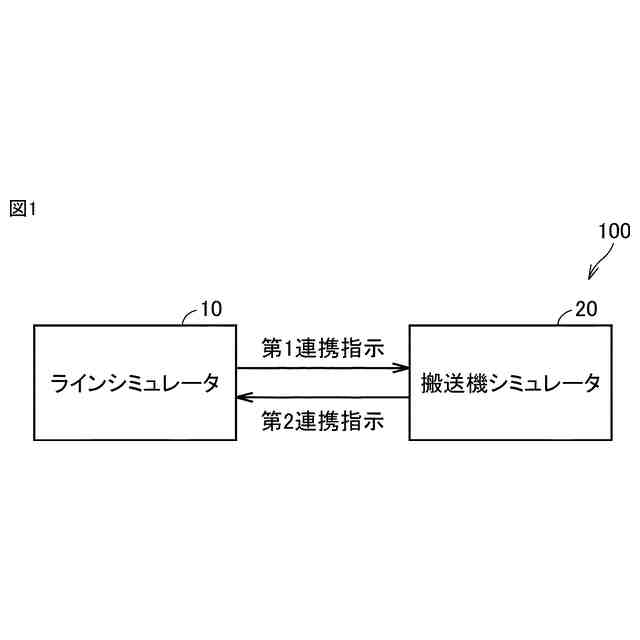
【解決手段】シミュレーションシステムは、仮想オブジェクトの流れをシミュレートするラインシミュレータと、自律型の仮想搬送機の動作をシミュレートする搬送機シミュレータとを備える。ラインシミュレータは、仮想オブジェクトが第1位置に到達してから所定時間経過したことに応じて、第1連携指示を出力する。搬送機シミュレータは、第1連携指示に応じて、第1位置に対応する第2位置から第3位置まで移動するように仮想搬送機の動作をシミュレートする。搬送機シミュレータは、仮想搬送機が第3位置に到達したことに応じて、第2連携指示を出力する。ラインシミュレータは、第2連携指示に応じて、第3位置に対応する第4位置からの仮想オブジェクトの流れのシミュレーションを再開する。
【選択図】図1
特許請求の範囲
【請求項1】
シミュレーションシステムであって、
第1仮想空間において、仮想生産ライン上の仮想オブジェクトの流れをシミュレートするラインシミュレータと、
第2仮想空間において、自律型の仮想搬送機の動作をシミュレートする搬送機シミュレータとを備え、
前記ラインシミュレータは、
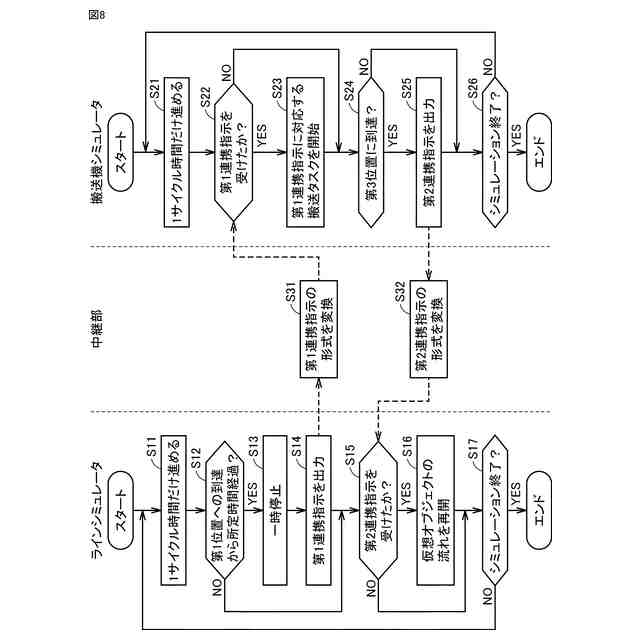
前記第1仮想空間において前記仮想オブジェクトが第1位置に到達してから第1所定時間経過したことに応じて、第1連携指示を出力し、
前記搬送機シミュレータは、
前記第1連携指示に応じて、前記第2仮想空間において、前記第1位置に対応する第2位置から第3位置まで移動するように前記仮想搬送機の動作をシミュレートし、
前記仮想搬送機が前記第3位置に到達したことに応じて、第2連携指示を出力し、
前記ラインシミュレータは、
前記第2連携指示に応じて、前記第1仮想空間において、前記第3位置に対応する第4位置からの前記仮想オブジェクトの流れのシミュレーションを再開する、シミュレーションシステム。
続きを表示(約 2,700 文字)
【請求項2】
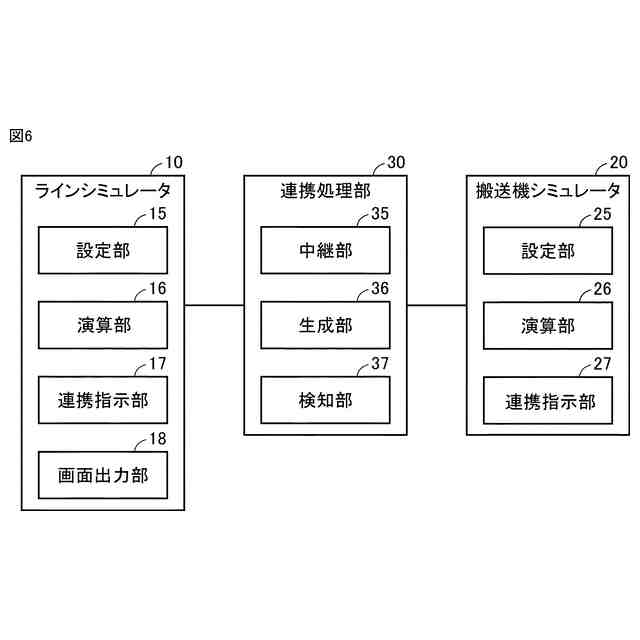
前記ラインシミュレータと前記搬送機シミュレータとの間で、前記第1連携指示および前記第2連携指示を中継する中継部をさらに備え、
前記中継部は、
前記搬送機シミュレータが認識可能な形式に前記第1連携指示を変換した後に、前記第1連携指示を前記搬送機シミュレータに出力し、
前記ラインシミュレータが認識可能な形式に前記第2連携指示を変換した後に、前記第2連携指示を前記ラインシミュレータに出力する、請求項1に記載のシミュレーションシステム。
【請求項3】
前記ラインシミュレータは、前記第1仮想空間を表す第1仮想画面を出力し、
前記シミュレーションシステムは、
前記搬送機シミュレータのシミュレーション結果に基づいて、前記第2仮想空間を表す第2仮想画面を生成する生成部をさらに備え、
前記第1仮想画面および前記第2仮想画面の一方は、透明の背景を有し、前記第1仮想画面および前記第2仮想画面の他方の上に重ねて表示される、請求項1に記載のシミュレーションシステム。
【請求項4】
前記第1仮想画面は、前記第1仮想空間の第5位置を表すマークを含み、
前記第2仮想画面は、前記第2仮想空間における前記第5位置に対応する第6位置が前記マークと重なるように表示される、請求項3に記載のシミュレーションシステム。
【請求項5】
前記第1仮想画面に基づいて、前記第2仮想空間における前記仮想搬送機の周囲の障害物を検知する検知部をさらに備え、
前記搬送機シミュレータは、前記障害物が検知されたことに応じて、前記障害物との干渉を回避するように前記仮想搬送機の動作をシミュレートし、
前記検知部は、
前記仮想搬送機の位置および姿勢に基づいて、前記第2仮想画面において、前記仮想搬送機の周囲の第1領域を特定し、
前記第1仮想画面と前記第2仮想画面とを重ねたときに、前記第1仮想画面において、前記第1領域と重なり合う第2領域を特定し、
前記第1仮想画面において、前記第2領域に特定色の画素が存在するか否かを判定し、
前記特定色の画素が存在することに応じて、前記第2仮想画面において、前記特定色の画素と重なり合う位置に前記障害物が存在すると決定する、請求項3に記載のシミュレーションシステム。
【請求項6】
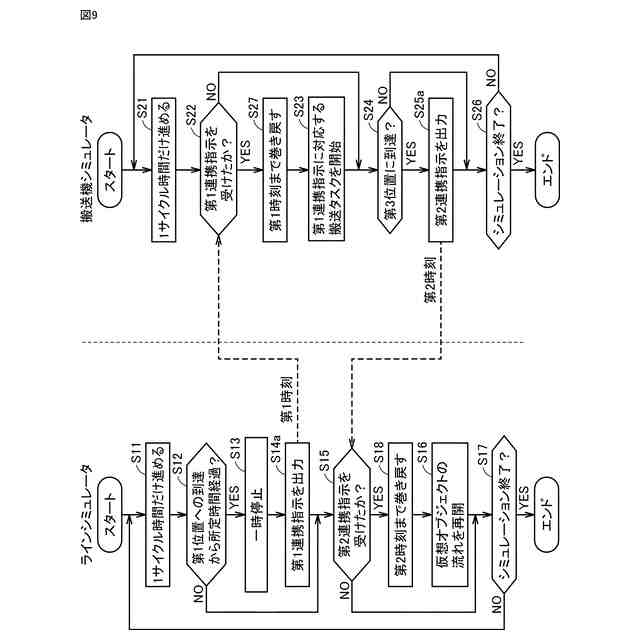
前記ラインシミュレータは、前記第1連携指示とともに、前記第1仮想空間において前記仮想オブジェクトが前記第1位置に到達してから前記第1所定時間経過した第1時刻を出力し、
前記搬送機シミュレータは、前記第2仮想空間の状態を前記第1時刻または前記第1時刻から第2所定時間経過した時刻まで巻き戻した後に、前記第2位置から前記第3位置まで移動するように前記仮想搬送機の動作をシミュレートする、請求項1から5のいずれか1項に記載のシミュレーションシステム。
【請求項7】
前記搬送機シミュレータは、前記第2連携指示とともに、前記第2仮想空間において前記仮想搬送機が前記第3位置に到達した第2時刻を出力し、
前記ラインシミュレータは、前記第1仮想空間の状態を前記第2時刻または前記第2時刻から第3所定時間経過した時刻まで巻き戻した後に、前記第4位置に前記仮想オブジェクトを配置する、請求項1から5のいずれか1項に記載のシミュレーションシステム。
【請求項8】
前記搬送機シミュレータは、前記仮想搬送機が前記第2位置に到達したことに応じて、第3連携指示を出力し、
前記ラインシミュレータは、
前記第1仮想空間を表す第1仮想画面を出力し、
前記第3連携指示に応じて、前記仮想オブジェクトが搬送中であることを表すように前記第1仮想画面を生成する、請求項1または2に記載のシミュレーションシステム。
【請求項9】
シミュレーション方法であって、
1以上のコンピュータが、第1仮想空間において、仮想生産ライン上の仮想オブジェクトの流れをシミュレートすることと、
前記1以上のコンピュータが、第2仮想空間において、自律型の仮想搬送機の動作をシミュレートすることとを備え、
前記仮想オブジェクトの流れをシミュレートすることは、
前記第1仮想空間において前記仮想オブジェクトが第1位置に到達してから所定時間経過したことに応じて、第1連携指示を出力することを含み、
前記仮想搬送機の動作をシミュレートすることは、
前記第1連携指示に応じて、前記第2仮想空間において、前記第1位置に対応する第2位置から第3位置まで移動するように前記仮想搬送機の動作をシミュレートすることと、
前記仮想搬送機が前記第3位置に到達したことに応じて、第2連携指示を出力することとを含み、
前記仮想オブジェクトの流れをシミュレートすることは、前記第2連携指示に応じて、前記第1仮想空間において、前記第3位置に対応する第4位置からの前記仮想オブジェクトの流れのシミュレーションを再開することを含む、シミュレーション方法。
【請求項10】
シミュレーション方法を1以上のコンピュータに実行させるプログラムであって、
前記シミュレーション方法は、
第1仮想空間において、仮想生産ライン上の仮想オブジェクトの流れをシミュレートすることと、
第2仮想空間において、自律型の仮想搬送機の動作をシミュレートすることとを含み、
前記仮想オブジェクトの流れをシミュレートすることは、
前記第1仮想空間において前記仮想オブジェクトが第1位置に到達してから所定時間経過したことに応じて、第1連携指示を出力することを含み、
前記仮想搬送機の動作をシミュレートすることは、
前記第1連携指示に応じて、前記第2仮想空間において、前記第1位置に対応する第2位置から第3位置まで移動するように前記仮想搬送機の動作をシミュレートすることと、
前記仮想搬送機が前記第3位置に到達したことに応じて、第2連携指示を出力することとを含み、
前記仮想オブジェクトの流れをシミュレートすることは、前記第2連携指示に応じて、前記第1仮想空間において、前記第3位置に対応する第4位置からの前記仮想オブジェクトの流れのシミュレーションを再開することを含む、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーションシステム、シミュレーション方法およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、生産ラインのモデルをコンピュータ上に構築してシミュレーションを実行する技術が開発されている。例えば、特開2010-282583号公報(特許文献1)は、生産管理データ、工程における装備の性能を定義する装備パラメータ、および素材を搬送する搬送設備の性能を定義する搬送設備パラメータに基づいて、各工程における素材の処理時間および工程間の搬送時間を計算する技術を開示している。搬送設備パラメータは、ユーザ入力に応じて予め設定され、搬送設備の移動速度および搬送可能な素材の個数を示す。
【0003】
特開2015-32120号公報(特許文献2)は、複数のシミュレータを連携する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
特開2010-282583号公報
特開2015-32120号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
近年、生産ラインに自律型の搬送機が導入されるケースが増えている。自律型の搬送機は、状況に応じて、搬送経路または搬送速度を適宜変化させながら、搬送対象物を搬送する。
【0006】
特許文献1に開示の技術では、予め設定された搬送設備パラメータに基づいて、素材の搬送時間が計算される。そのため、特許文献1に開示の技術は、自律型の搬送機の動作を精度よくシミュレートできない。
【0007】
したがって、ユーザは、自律型の搬送機が導入される生産ラインの動作をシミュレートするために、自律型の搬送機の動作をシミュレートするシミュレータで得られたパラメータを、生産ラインの動作をシミュレートするシミュレータに手動で入力する必要がある。
【0008】
特許文献2は、複数のシミュレータを連携させる技術を開示しているが、生産ラインのシミュレータと、自律型の搬送機のシミュレータとの連携について考慮していない。
【0009】
本開示は、上記の問題に鑑みてなされたものであり、その目的は、自律型の搬送機が導入される生産ラインの流れを精度良くシミュレート可能なシミュレーションシステム、シミュレーション方法およびプログラムを提供することである。
【課題を解決するための手段】
【0010】
本開示の一例によれば、シミュレーションシステムは、第1仮想空間において、仮想生産ライン上の仮想オブジェクトの流れをシミュレートするラインシミュレータと、第2仮想空間において、自律型の仮想搬送機の動作をシミュレートする搬送機シミュレータとを備える。ラインシミュレータは、第1仮想空間において仮想オブジェクトが第1位置に到達してから第1所定時間経過したことに応じて、第1連携指示を出力する。搬送機シミュレータは、第1連携指示に応じて、第2仮想空間において、第1位置に対応する第2位置から第3位置まで移動するように仮想搬送機の動作をシミュレートする。搬送機シミュレータは、仮想搬送機が第3位置に到達したことに応じて、第2連携指示を出力する。ラインシミュレータは、第2連携指示に応じて、第1仮想空間において、第3位置に対応する第4位置からの仮想オブジェクトの流れのシミュレーションを再開する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
安全装置
3日前
オムロン株式会社
電磁ロック装置
4日前
オムロン株式会社
車椅子用治具および車椅子
3日前
オムロン株式会社
車椅子用治具および車椅子
3日前
オムロン株式会社
制御装置、制御方法及び制御プログラム
5日前
オムロン株式会社
風計測装置およびこれを備えた気象センサ
10日前
オムロン株式会社
風計測装置、風計測方法および風計測プログラム
10日前
オムロン株式会社
打返し制御装置、打返し制御方法、打返し制御プログラム、及び打返し装置
6日前
オムロン株式会社
情報処理装置、学習済みモデル生成装置、情報処理方法、学習済みモデル生成方法、情報処理プログラム、及び学習済みモデル生成プログラム
12日前
株式会社FUJI
工作機械
5日前
株式会社ダイヘン
移動体
10日前
ローム株式会社
半導体集積回路
20日前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
23日前
株式会社ダイフク
搬送設備
5日前
株式会社ダイフク
搬送設備
1か月前
株式会社オプトン
制御プログラム生成装置
3日前
三菱電機株式会社
自己位置推定装置
1か月前
株式会社鷺宮製作所
制御装置
4日前
株式会社ダイフク
物品搬送設備
19日前
トヨタ自動車株式会社
移動体、及び制御方法
1か月前
株式会社ダイヘン
負荷時タップ切換器
10日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
3日前
株式会社戸張空調
アクセル・ブレーキ操作装置
16日前
WHILL株式会社
電動モビリティ
1か月前
オムロン株式会社
安全装置
3日前
シンフォニアテクノロジー株式会社
異常検知装置
3日前
株式会社計数技研
移動体、及びプログラム
1か月前
ローム株式会社
半導体装置
26日前
株式会社ダイヘン
搬送車
1か月前
日本信号株式会社
自走式装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社ダイヘン
移動体、及び誘導線検出装置
1か月前
株式会社日立製作所
製造工程管理システム
4日前
株式会社大林組
作業機械の自動運転制御システム
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ