TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093179
公報種別
公開特許公報(A)
公開日
2025-06-23
出願番号
2023208761
出願日
2023-12-11
発明の名称
打返し制御装置、打返し制御方法、打返し制御プログラム、及び打返し装置
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
A63F
9/00 20060101AFI20250616BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】速度を細かく制御せずに対象物を目標位置に打返すことができる。
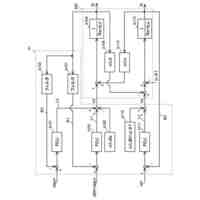
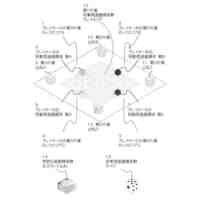
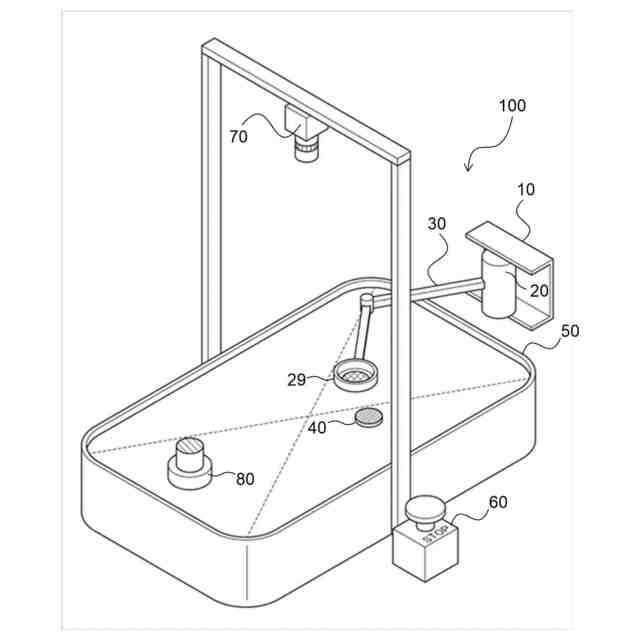
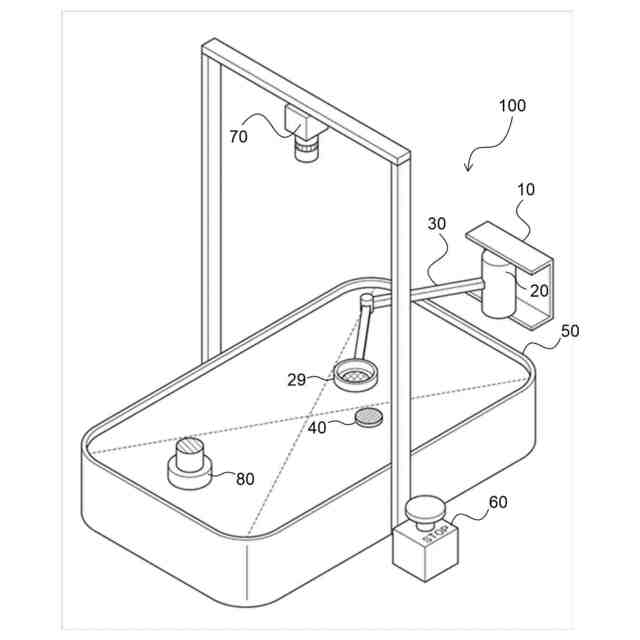
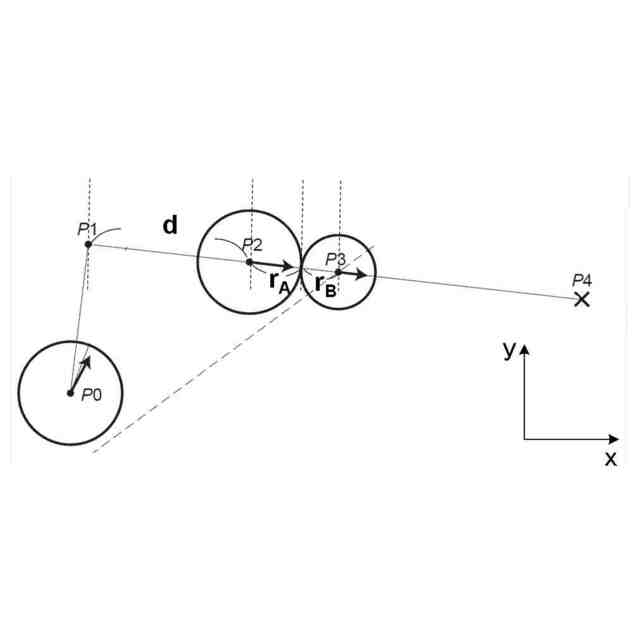
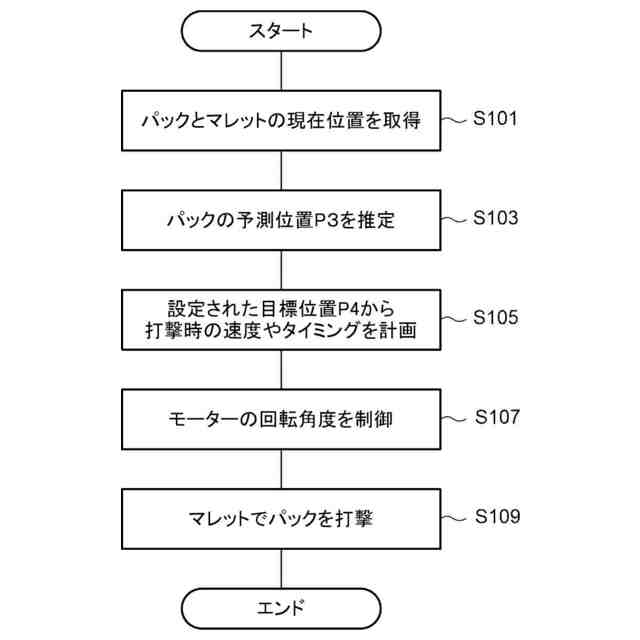
【解決手段】移動する対象物の各時刻における予測位置を予測し、対象物をロボットアームの手先で打返して到達させる位置として予め設定される目標位置と、予測位置とを通る直線上の位置であって、対象物を目標位置に向かって打返すための手先の打撃位置を、各時刻における予測位置のそれぞれに応じて算出し、直線上で打撃位置を挟んで予測位置と反対の位置であって、打撃位置から第1の距離にある位置を経由位置とする条件下で、各時刻における打撃位置のそれぞれに応じて設定される経由位置のうち、手先の動作開始前の開始位置と経由位置との第2の距離が最小となる経由位置を決定し、開始位置から決定された経由位置を経由して、経由位置に対応する打撃位置まで手先を移動させることにより、対象物を目標位置に向けて打返すように、手先の位置を制御する、打返し制御装置。
【選択図】図1
特許請求の範囲
【請求項1】
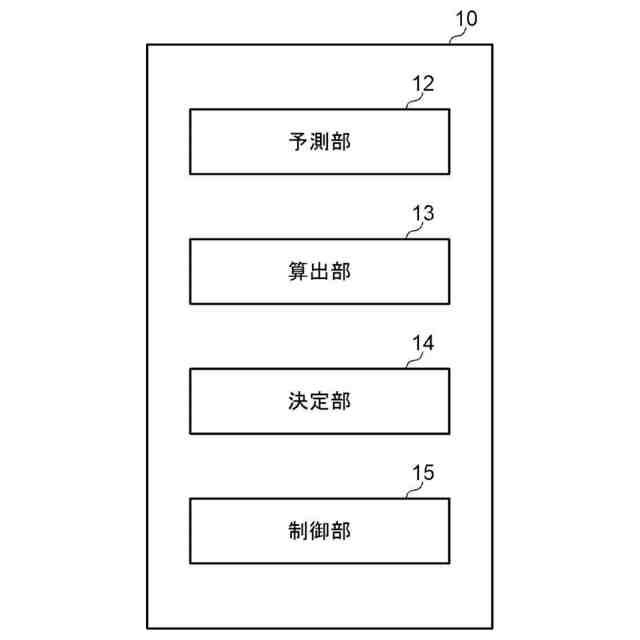
移動する対象物の各時刻における予測位置を予測する予測部と、
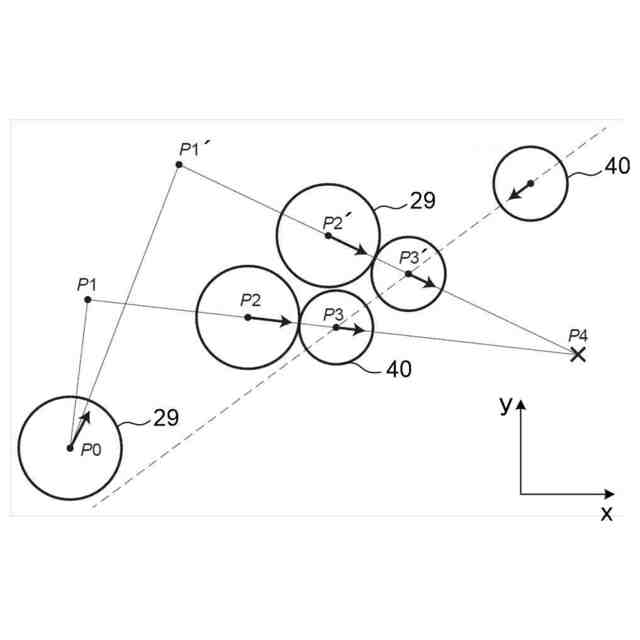
前記対象物をロボットアームの手先で打返して到達させる位置として予め設定される目標位置と、前記予測位置とを通る直線上の位置であって、前記対象物を前記目標位置に向かって打返すための前記手先の打撃位置を、前記各時刻における予測位置のそれぞれに応じて算出する算出部と、
前記直線上で前記打撃位置を挟んで前記予測位置と反対の位置であって、前記打撃位置から第1の距離にある位置を経由位置とする条件下で、前記各時刻における打撃位置のそれぞれに応じて設定される経由位置のうち、前記手先の動作開始前の開始位置と前記経由位置との第2の距離が最小となる前記経由位置を決定する決定部と、
前記開始位置から前記決定部で決定された前記経由位置を経由して、前記決定部で決定された前記経由位置に対応する前記打撃位置まで前記手先を移動させることにより、前記対象物を前記目標位置に向けて打返すように、前記手先の位置を制御する制御部と、
を含む打返し制御装置。
続きを表示(約 1,400 文字)
【請求項2】
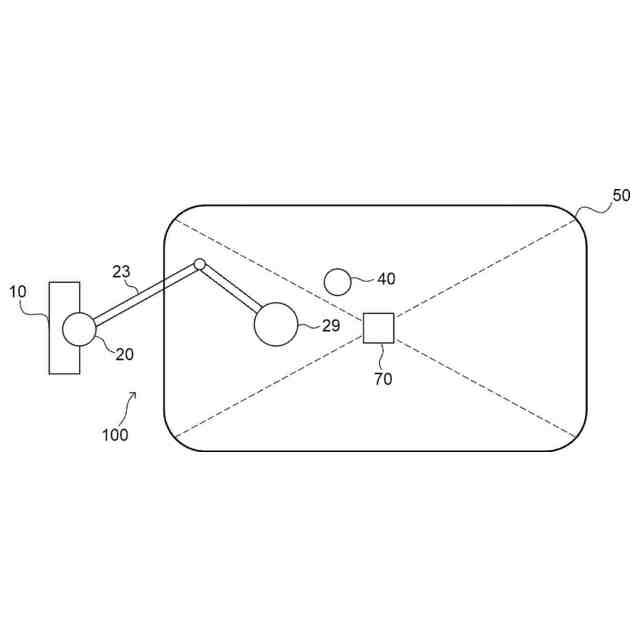
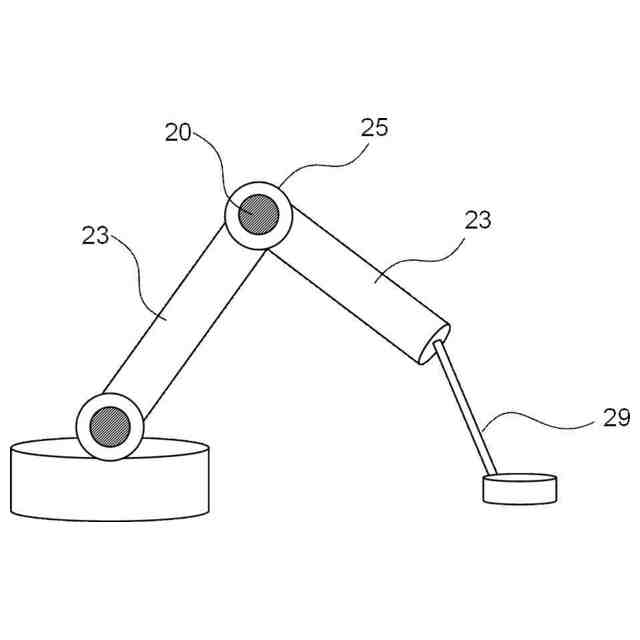
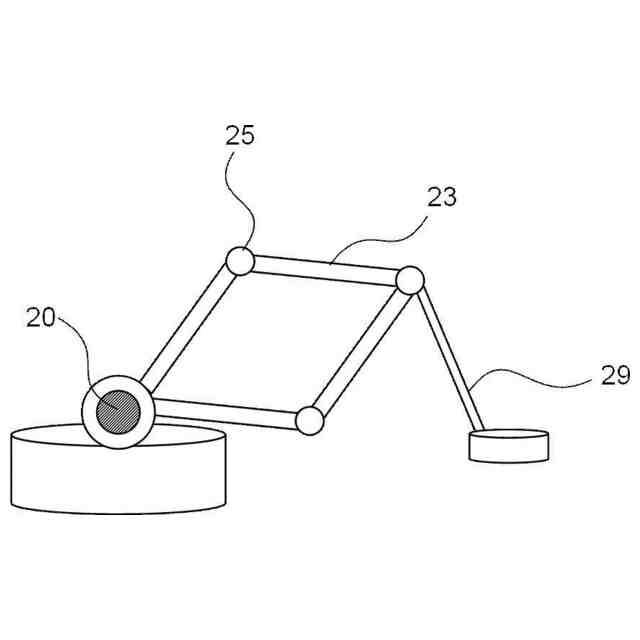
前記ロボットアームは、複数のリンクとリンク間を接合する関節とを含み、
前記制御部は、前記関節の角度を、モーターの回転角度に応じて制御することで、前記手先の位置を制御する、
請求項1に記載の打返し制御装置。
【請求項3】
前記制御部は、決定した前記経由位置に対応する前記予測位置に前記対象物が到達する到達時刻、前記第1の距離及び前記第2の距離、並びに前記モーターの回転速度に応じた前記手先の移動速度に基づいて、前記手先が前記到達時刻に前記打撃位置に到達するように、前記開始位置から前記手先の移動を開始する時刻を制御する、
請求項2に記載の打返し制御装置。
【請求項4】
前記算出部は、前記直線上で前記予測位置を挟んで前記目標位置と反対の位置であって、前記予測位置に配置される前記対象物の形状と前記手先の形状とが接する場合の前記手先の所定位置を、前記打撃位置として算出する、
請求項1に記載の打返し制御装置。
【請求項5】
前記対象物及び前記手先の各々の形状が円形の場合、前記予測位置を、前記対象物の中心位置とし、前記打撃位置、前記経由位置、及び前記開始位置の各々を、前記手先の中心位置とし、
前記算出部は、前記直線上で前記予測位置を挟んで前記目標位置と反対の位置であって、前記予測位置から、前記対象物の半径と前記手先の半径との和である第3の距離にある位置を、前記打撃位置として算出する、
請求項4に記載の打返し制御装置。
【請求項6】
前記第1の距離は、動的に変更可能である、
請求項1に記載の打返し制御装置。
【請求項7】
前記決定部は、前記打撃位置での前記手先の目標速度、前記対象物の移動速度、及び前記手先が移動可能な範囲の少なくとも1つに応じて、前記第1の距離を設定する、
請求項6に記載の打返し制御装置。
【請求項8】
前記モーターは、一定の回転速度の下で回転角度が制御されるモーターであり、
前記制御部は、前記モーターに回転角度の指令値を出力する、
請求項2に記載の打返し制御装置。
【請求項9】
前記モーターは、位置制御サーボモーターである、
請求項8に記載の打返し制御装置。
【請求項10】
移動する対象物の各時刻における予測位置を予測し、
前記対象物をロボットアームの手先で打返して到達させる位置として予め設定される目標位置と、前記予測位置とを通る直線上の位置であって、前記対象物を前記目標位置に向かって打返すための前記手先の打撃位置を、前記各時刻における予測位置のそれぞれに応じて算出し、
前記直線上で前記打撃位置を挟んで前記予測位置と反対の位置であって、前記打撃位置から第1の距離にある位置を経由位置とする条件下で、前記各時刻における打撃位置のそれぞれに応じて設定される経由位置のうち、前記手先の動作開始前の開始位置と前記経由位置との第2の距離が最小となる前記経由位置を決定し、
前記開始位置から前記決定された前記経由位置を経由して、前記決定された前記経由位置に対応する前記打撃位置まで前記手先を移動させることにより、前記対象物を前記目標位置に向けて打返すように、前記手先の位置を制御する処理を、
コンピュータが実行する打返し制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、打返し制御装置、打返し制御方法、打返し制御プログラム、及び打返し装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
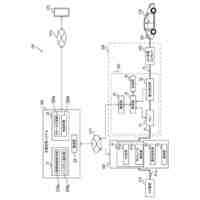
プレイフィールド盤上にある移動体を打ち合い、その移動体の打ち返しを所定のルールに基づいて競い合うゲームであって、移動体を打ち返すことができる機構との対戦形態であるゲーム装置が提案されている。このゲーム装置は、移動体を打ち返すことができるマニピュレーターと、当該プレイフィールド盤上の移動体の移動情報を取り込む移動体位置検出手段と、移動体位置検出手段から得た移動体の移動情報を基にマニピュレーターで移動体を打ち返す駆動制御情報を生成し、この駆動制御情報によってマニピュレーターを駆動制御する制御手段とを備える(特許文献1)。
【0003】
また、エアーホッケーをタスクの一例として、正確かつ高速な軌道を生成し、環境の変化に即座に反応するロボットエージェントを設計する技術が提案されている(非特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特開2000-300823号公報
【非特許文献】
【0005】
Liu, P., Tateo, D., Bou-Ammar, H., & Peters, J., "Efficient and reactive planning for high speed robot air hockey" IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 586-593, 2021
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の技術では、向かってきた移動体を打返すだけであり、移動体を特定の目標位置に向かって打返すことは行われていない。移動体を目標位置に打返すためには、例えば、非特許文献2に記載のロボットアームのように、制御周期を短くして、手先の移動速度を連続的に制御でき、かつ剛性が高いといった高性能なロボットアームが必要になるという課題があった。
【0007】
本開示は、上記の点に鑑みてなされたものであり、ロボットアームの性能に依存することなく、手先を目標に向かって細かく速度調整せずに目標位置への対象物の打返しを実現することができる打返し制御装置、打返し制御方法、打返し制御プログラム、打返し装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
第1の態様の打返し制御装置は、移動する対象物の各時刻における予測位置を予測する予測部と、前記対象物をロボットアームの手先で打返して到達させる位置として予め設定される目標位置と、前記予測位置とを通る直線上の位置であって、前記対象物を前記目標位置に向かって打返すための前記手先の打撃位置を、前記各時刻における予測位置のそれぞれに応じて算出する算出部と、前記直線上で前記打撃位置を挟んで前記予測位置と反対の位置であって、前記打撃位置から第1の距離にある位置を経由位置とする条件下で、前記各時刻における打撃位置のそれぞれに応じて設定される経由位置のうち、前記手先の動作開始前の開始位置と前記経由位置との第2の距離が最小となる前記経由位置を決定する決定部と、前記開始位置から前記決定部で決定された前記経由位置を経由して、前記決定部で決定された前記経由位置に対応する前記打撃位置まで前記手先を移動させることにより、前記対象物を前記目標位置に向けて打返すように、前記手先の位置を制御する制御部と、を含んで構成されている。
【0009】
第1の態様の打返し制御装置によれば、ロボットアームの性能に依存することなく、手先を目標に向かって細かく速度調整せずに目標位置への対象物の打返しを実現することができる。
【0010】
第2の態様の打返し制御装置は、第1の態様の打返し制御装置であって、前記ロボットアームは、複数のリンクとリンク間を接合する関節とを含み、前記制御部は、前記関節の角度を、モーターの回転角度に応じて制御することで、前記手先の位置を制御する。第2の態様の打返し制御装置によれば、モーターの回転角度に応じて手先の位置を制御できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
ドライバ
11日前
オムロン株式会社
電磁継電器
13日前
オムロン株式会社
スイッチ装置
10日前
オムロン株式会社
シート検査装置
11日前
オムロン株式会社
処理方法、及び処理装置
11日前
オムロン株式会社
充電システム及びモジュール
10日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
11日前
オムロン株式会社
情報処理装置、情報処理方法およびプログラム
10日前
オムロン株式会社
設定確認端末、駅務機器、および設定確認方法
5日前
個人
玩具
25日前
個人
玩具
5か月前
個人
ゲーム玩具
2か月前
個人
盤上遊戯具
5か月前
個人
フィギュア
6か月前
株式会社三共
遊技機
25日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
株式会社三共
遊技機
23日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ