TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084395
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198266
出願日
2023-11-22
発明の名称
自動運転情報処理装置、自動運転システム、自動運転方法および自動運転プログラム
出願人
コベルコ建機株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20250527BHJP(水工;基礎;土砂の移送)
要約
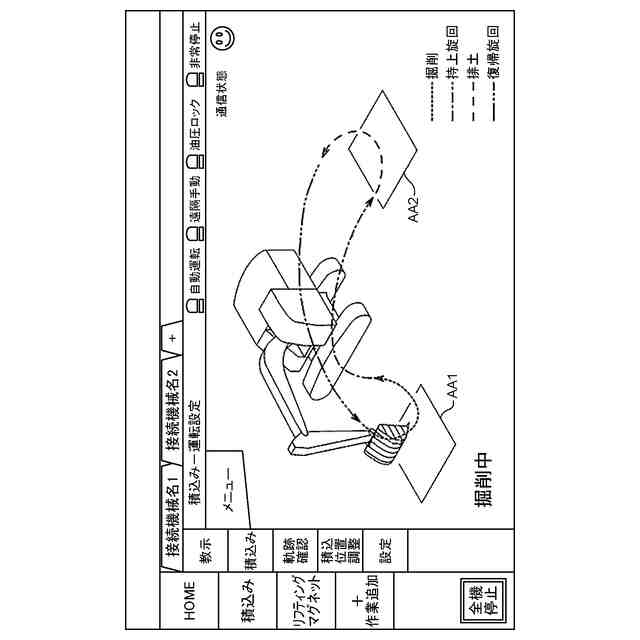
【課題】作業機械の自動運転により行われる作業が複数の動作ステップを含む場合において、作業現場画像を見る作業関係者が煩雑な入力操作を行わなくても、自動運転中に動作ステップに応じて作業現場画像の視点を変えることができる自動運転情報処理装置を提供する。
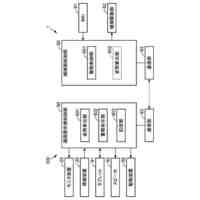
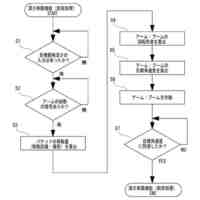
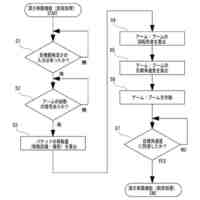
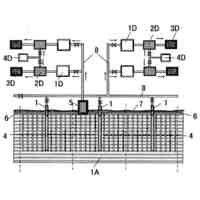
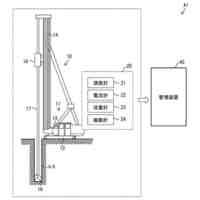
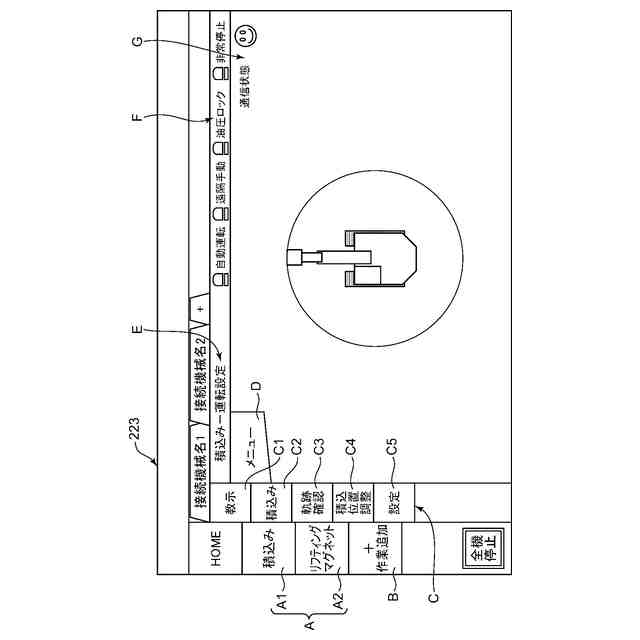
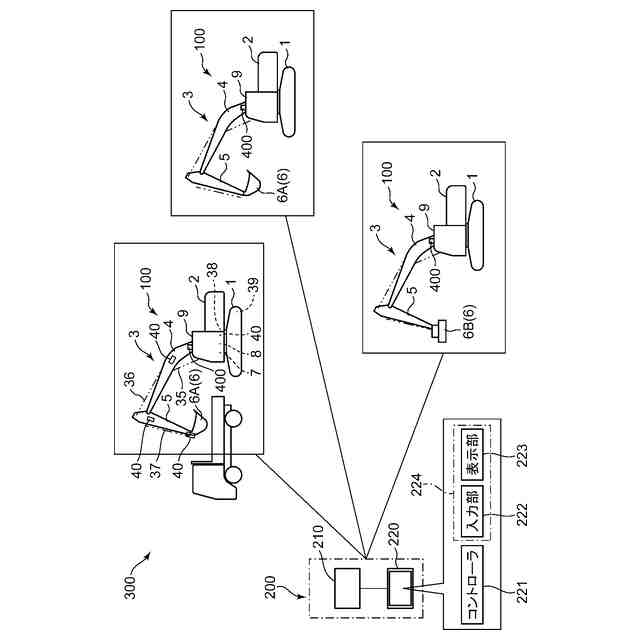
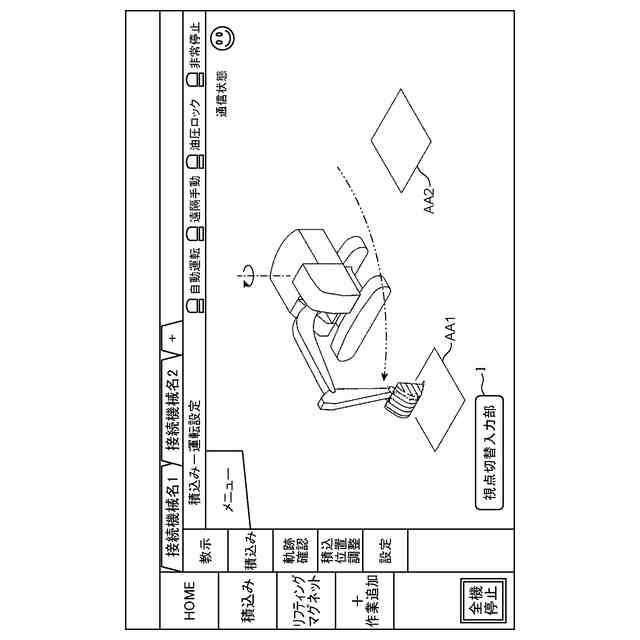
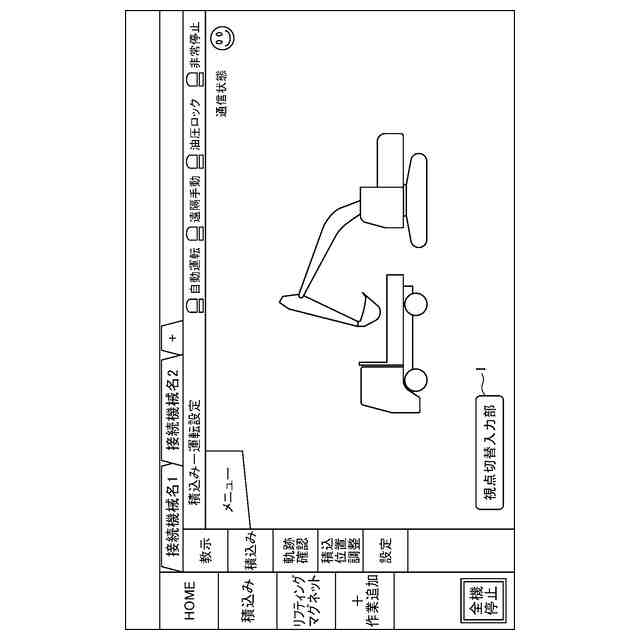
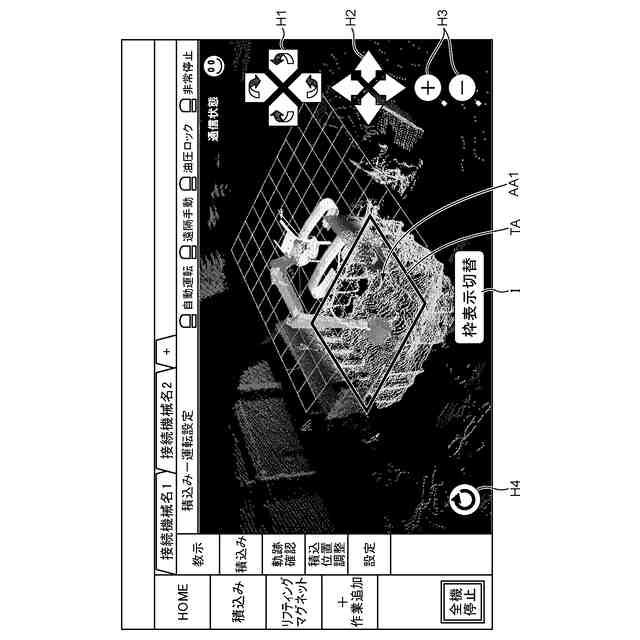
【解決手段】自動運転情報処理装置(200)は、作業機械(100)の自動運転のための情報処理装置である。自動運転情報処理装置(200)は、作業現場の画像である作業現場画像を表示するための表示部(223)と、表示部(223)を制御するコントローラ(222)と、を備える。コントローラ(222)は、前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じて前記作業現場画像の視点を変える処理を実行する。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械の自動運転のための自動運転情報処理装置であって、
作業現場の画像である作業現場画像を表示するための表示部と、
前記表示部を制御するコントローラと、を備え、
前記コントローラは、前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じて前記作業現場画像の視点を変える処理を実行する、自動運転情報処理装置。
続きを表示(約 1,100 文字)
【請求項2】
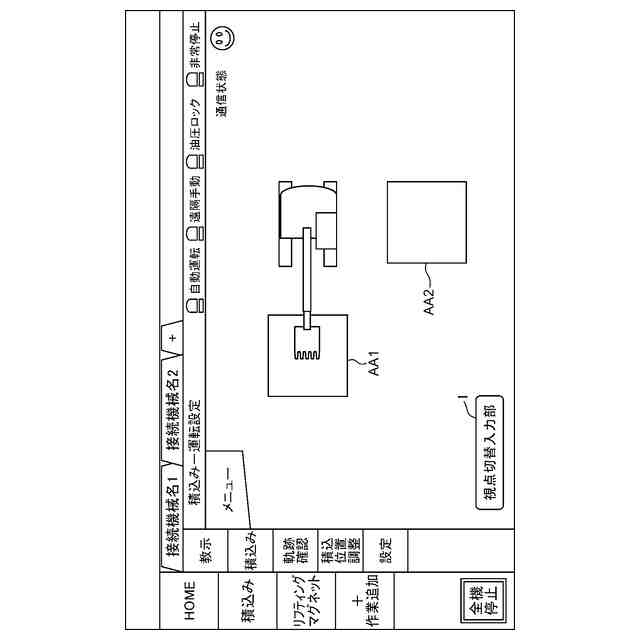
前記コントローラは、予め設定された視点である特定視点からの前記作業現場画像に切り替えるための作業関係者による入力操作を受ける視点切替入力部を前記表示部に表示させる、請求項1に記載の自動運転情報処理装置。
【請求項3】
前記入力操作は、前記作業関係者による単一の操作である、請求項2に記載の自動運転情報処理装置。
【請求項4】
前記コントローラは、前記自動運転の開始前に、前記作業現場における作業目標のずれを確認するために予め設定された特定視点からの画像に前記作業現場画像が切り替わるように前記表示部を制御する、請求項1に記載の自動運転情報処理装置。
【請求項5】
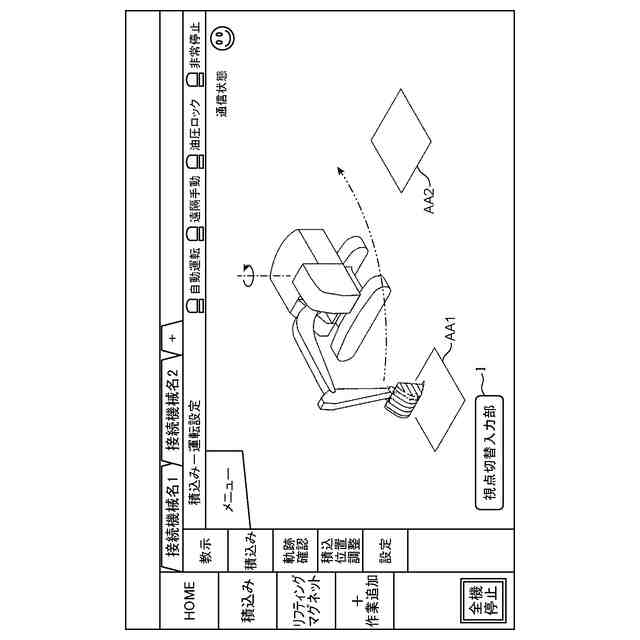
前記コントローラは、前記作業現場において予め設定された特定動作が行われるように前記作業機械を制御するように構成され、
前記コントローラは、前記自動運転の開始前に、前記特定動作に比べて簡易的な非常停止確認動作が行われるように前記作業機械を制御する、請求項1に記載の自動運転情報処理装置。
【請求項6】
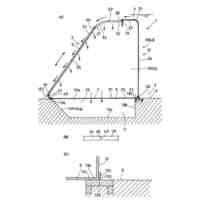
前記作業機械は、機体と、前記機体に起伏可能に支持される起伏部材と、前記起伏部材の先端部に回動可能に支持される先端アタッチメントと、を備え、
前記非常停止確認動作は、前記先端アタッチメントの回動動作である、請求項5に記載の自動運転情報処理装置。
【請求項7】
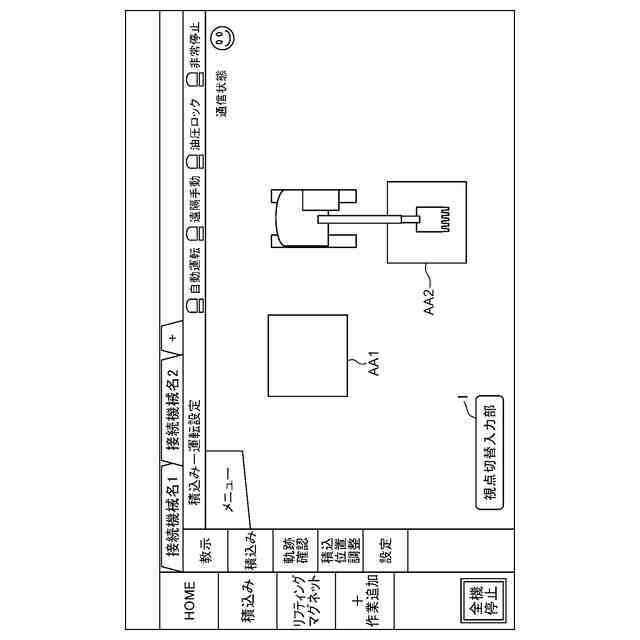
前記作業機械は、機体と、前記機体に支持される作業装置と、を備え、
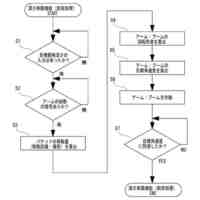
前記複数の動作ステップは、第1動作ステップと、前記第1動作ステップの次に行われる第2動作ステップと、を含み、
前記コントローラは、前記作業装置における予め設定された特定部位が前記第1動作ステップに対応する作業エリアの境界から外に出た場合、前記第1動作ステップから前記第2動作ステップに移行したと判定する、請求項1に記載の自動運転情報処理装置。
【請求項8】
請求項1~7の何れか1項に記載の自動運転情報処理装置と、
前記作業機械と、を備える自動運転システム。
【請求項9】
作業機械の自動運転における作業現場の画像である作業現場画像の視点を前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じてコントローラが変えることを含む自動運転方法。
【請求項10】
作業機械の自動運転における作業現場の画像である作業現場画像の視点を前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じて変える処理をコンピュータに実行させる自動運転プログラム。
発明の詳細な説明
【技術分野】
【0001】
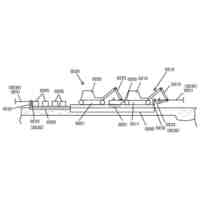
本開示は、油圧ショベルなどの作業機械に関連する技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1は、ショベルとこのショベルに設けられる自動運転コントローラとから構成される自動運転ショベルを開示する。自動運転コントローラは、ショベルが自動運転時に取るべき教示された少なくとも掘削位置と放土位置に基づいて、ショベルに一連の繰り返し動作を行わせる。特許文献2は、作業機械に関する位置情報を設定する位置情報設定システムを開示する。特許文献3は、作業対象物を任意のアングルから見た場合でも作業対象物までの距離感が正確につかめるような画像を表示する遠隔操作システムを開示する。
【先行技術文献】
【特許文献】
【0003】
特開2001-182091号公報
特開2023-68408号公報
国際公開第2017/042873号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示における第1の課題は次のとおりである。すなわち、作業機械の自動運転により行われる作業が複数の動作ステップを含む場合、複数の動作ステップのそれぞれには作業関係者にとって見やすい視点があるので、作業関係者は、自動運転中に動作ステップに応じて作業現場画像の視点を変えるための煩雑な入力操作を行う必要がある。
【課題を解決するための手段】
【0005】
本開示における第1の目的は、作業機械の自動運転により行われる作業が複数の動作ステップを含む場合において、作業現場画像を見る作業関係者が煩雑な入力操作を行わなくても、自動運転中に動作ステップに応じて作業現場画像の視点を変えることができる技術を提供することである。
【0006】
前記第1の課題を解決するための第1の発明は、自動運転情報処理装置、自動運転システム、自動運転方法および自動運転プログラムを含む。
【0007】
前記第1の発明の一態様に係る自動運転情報処理装置は、作業機械の自動運転のための情報処理装置であって、作業現場の画像である作業現場画像を表示するための表示部と、前記表示部を制御するコントローラと、を備え、前記コントローラは、前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じて前記作業現場画像の視点を変える処理を実行する。
【0008】
前記第1の発明の他の態様に係る自動運転システムは、前記自動運転情報処理装置と、前記作業機械と、を備える。
【0009】
前記第1の発明のさらに他の態様に係る自動運転方法は、作業機械の自動運転における作業現場の画像である作業現場画像の視点を前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じてコントローラが変えることを含む。
【0010】
前記第1の発明のさらに他の態様に係る自動運転プログラムは、作業機械の自動運転における作業現場の画像である作業現場画像の視点を前記作業現場の作業に含まれる予め設定された複数の動作ステップに応じて変える処理をコンピュータに実行させる。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
15日前
株式会社竹中工務店
壁接合工法
22日前
住友建機株式会社
ショベル
21日前
株式会社大林組
人工地盤構造
8日前
株式会社エコ・プランナー
取水装置
21日前
コベルコ建機株式会社
操作装置
22日前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
8日前
株式会社奥村組
建物の基礎構造
28日前
中部美化企業株式会社
水門装置
28日前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
8日前
株式会社ダイトー
護岸コンクリートの補修構造
21日前
住友重機械工業株式会社
作業機械
21日前
越後商事株式会社
ツース盤
17日前
株式会社プラント・ツリース
杭基礎構造
14日前
鹿島建設株式会社
設備架台の施工方法
15日前
個人
狭小水域浚渫システムおよび方法
14日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
21日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
7日前
鹿島建設株式会社
杭施工方法
15日前
株式会社小松製作所
作業機械
23日前
株式会社小松製作所
作業車両
23日前
株式会社竹内製作所
土砂侵入防止構造
28日前
キヤノン株式会社
移動体および撮像装置
23日前
強化土エンジニヤリング株式会社
地盤強化工法
今日
コベルコ建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
今日
コベルコ建機株式会社
操作装置及び操作システム
22日前
株式会社大林組
施工管理システム及び施工管理方法
21日前
株式会社アイガー産業
止水装置
14日前
株式会社大林組
物体の設置方法
15日前
ノザキ建工株式会社
鋼管杭
9日前
株式会社荒谷建設コンサルタント
水力駆動除塵装置
23日前
株式会社みつば電気
水力発電設備
24日前
コベルコ建機株式会社
建設機械
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ