TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084277
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198059
出願日
2023-11-22
発明の名称
異常検知装置、モータシステム及び異常検知方法
出願人
ミネベアミツミ株式会社
代理人
個人
,
個人
主分類
H02P
29/024 20160101AFI20250527BHJP(電力の発電,変換,配電)
要約
【課題】本開示は、モータの異常判定における誤検知を抑制する異常検知装置を提供する。
【解決手段】モータの異常を検知する異常検知装置であって、前記モータに関する特性値をサンプル周期ごとに取得する取得部と、前記取得部が取得した特性値を処理する処理部と、を備え、前記処理部は、(a)前記モータに関する特性値を検査データとして取得する手順と、(b)前記検査データの平均値を更新する手順と、(c)前記検査データの標準偏差を更新する手順と、(d)前記検査データと前記平均値との差の2乗を、前記標準偏差の2乗で割って異常度を更新する手順と、(e)閾値に基づいて、前記異常度の累積和を算出する手順と、を実行する異常検知装置。
【選択図】図1
特許請求の範囲
【請求項1】
モータの異常を検知する異常検知装置であって、
前記モータに関する特性値をサンプル周期ごとに取得する取得部と、
前記取得部が取得した特性値を処理する処理部と、を備え、
前記処理部は、
(a)前記モータに関する特性値を検査データとして取得する手順と、
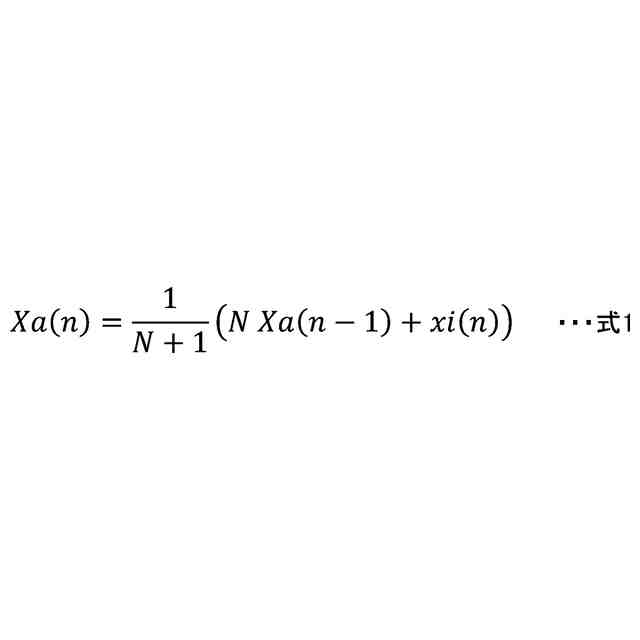
(b)前記検査データの平均値を更新する手順と、
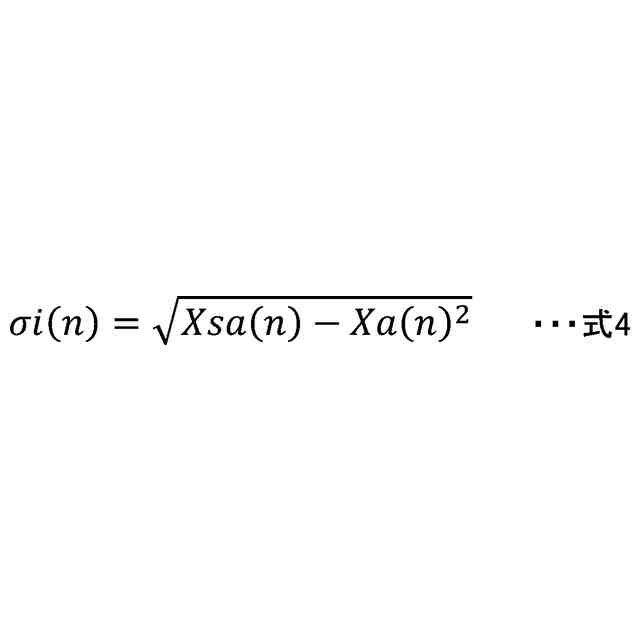
(c)前記検査データの標準偏差を更新する手順と、
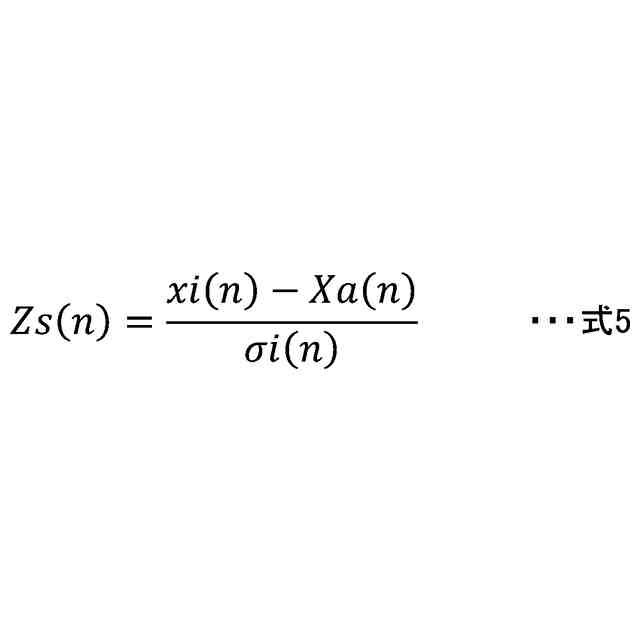
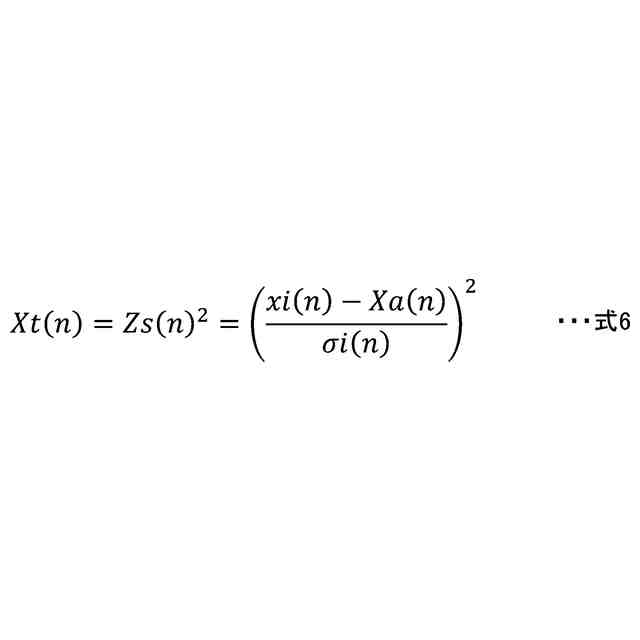
(d)前記検査データと前記平均値との差の2乗を、前記標準偏差の2乗で割って異常度を更新する手順と、
(e)閾値に基づいて、前記異常度の累積和を算出する手順と、
を実行する、
異常検知装置。
続きを表示(約 940 文字)
【請求項2】
前記特性値は、前記モータに供給される電力の電流値、電圧値、前記モータの回転数及びデューティ比のいずれかである、
請求項1に記載の異常検知装置。
【請求項3】
前記(e)手順において、
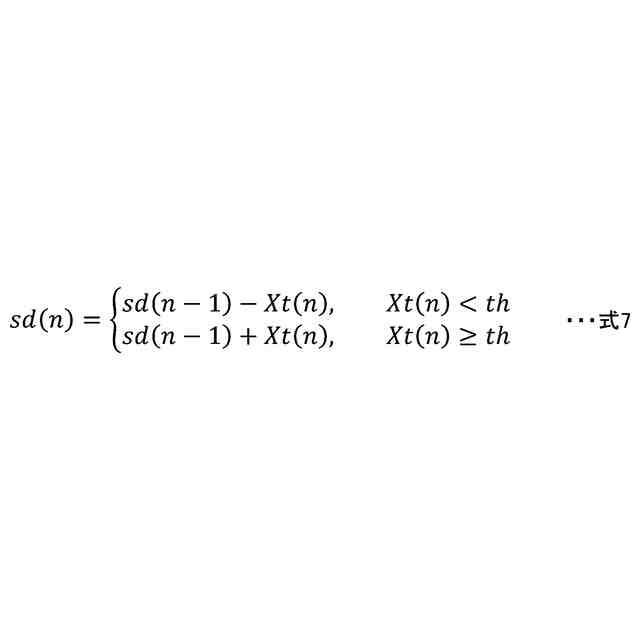
前記異常度が前記閾値以上の場合は、前記異常度の累積和に前記異常度を加えた値を前記異常度の累積和として更新し、
前記異常度が前記閾値未満の場合は、前記異常度の累積和から前記異常度を引いた値を前記異常度の累積和として更新する、
請求項1又は請求項2のいずれかに記載の異常検知装置。
【請求項4】
前記(e)手順において、
有意水準とカイ2乗分布に基づいて前記閾値を算出する、
請求項3に記載の異常検知装置。
【請求項5】
モータと、
前記モータの異常を検知する異常検知装置と、
を備え、
前記異常検知装置は、
前記モータに関する特性値をサンプル周期ごとに取得する取得部と、
前記取得部が取得した特性値を処理する処理部と、を備え、
前記処理部は、
(a)前記モータに関する特性値を検査データとして取得する手順と、
(b)前記検査データの平均値を更新する手順と、
(c)前記検査データの標準偏差を更新する手順と、
(d)前記検査データと前記平均値との差の2乗を、前記標準偏差の2乗で割って異常度を更新する手順と、
(e)閾値に基づいて、前記異常度の累積和を算出する手順と、
を実行する、
モータシステム。
【請求項6】
モータの異常を検知する異常検知方法であって、
(a)前記モータに関する特性値を検査データとして取得する工程と、
(b)前記検査データの平均値を更新する工程と、
(c)前記検査データの標準偏差を更新する工程と、
(d)前記検査データと前記平均値との差の2乗を、前記標準偏差の2乗で割って異常度を更新する工程と、
(e)閾値に基づいて、前記異常度の累積和を算出する工程と、
を含む、
異常検知方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常検知装置、モータシステム及び異常検知方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、モータ駆動機構の機械異常を判定する異常判定装置が開示されている。特許文献1には、異常判定装置が、時系列データのデータ異常を判定するデータ異常判定部と、データ異常と判定された時系列データの取得態様に基づいて、モータ駆動機構の機械異常を判定する機械異常判定部と、を備えることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-151598号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
異常検知アルゴリズムにおいて、データが正規分布に従うと仮定している場合がある。データが正規分布に従うと仮定している場合、データが正規分布から外れると、異常を誤検知する場合がある。
【0005】
本開示は、モータの異常判定における誤検知を抑制する異常検知装置を提供する。
【課題を解決するための手段】
【0006】
本開示の一態様では、モータの異常を検知する異常検知装置であって、前記モータに関する特性値をサンプル周期ごとに取得する取得部と、前記取得部が取得した特性値を処理する処理部と、を備え、前記処理部は、(a)前記モータに関する特性値を検査データとして取得する手順と、(b)前記検査データの平均値を更新する手順と、(c)前記検査データの標準偏差を更新する手順と、(d)前記検査データと前記平均値との差の2乗を、前記標準偏差の2乗で割って異常度を更新する手順と、(e)閾値に基づいて、前記異常度の累積和を算出する手順と、を実行する異常検知装置が提供される。
【発明の効果】
【0007】
本開示のモータの異常検知装置によれば、モータの異常判定における誤検知を抑制できる。
【図面の簡単な説明】
【0008】
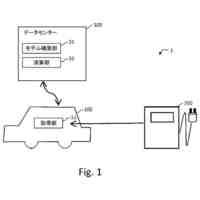
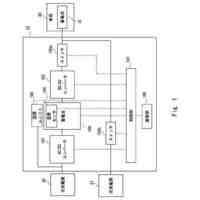
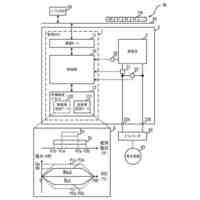
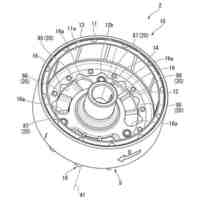
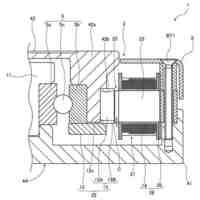
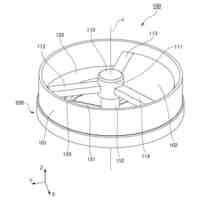
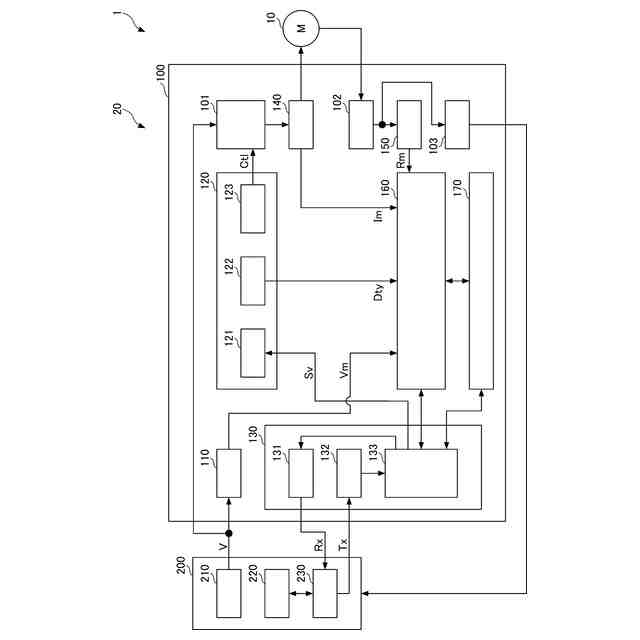
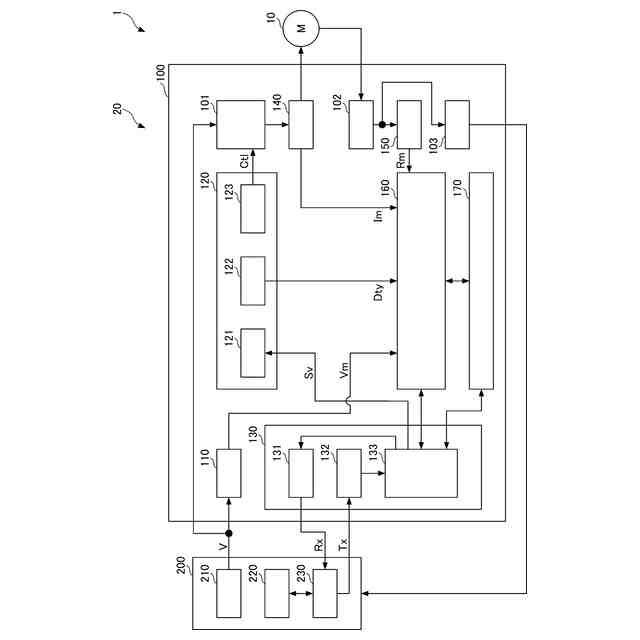
図1は、本実施形態に係るモータ制御装置が用いられるモータシステムの概略を示す図である。
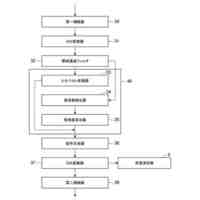
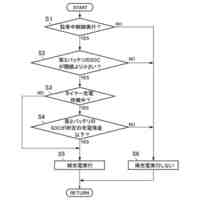
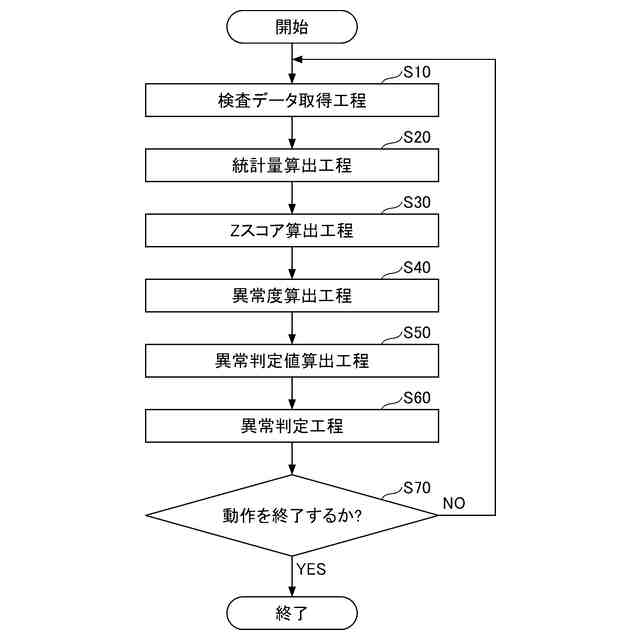
図2は、本実施形態に係るモータ制御装置における処理を説明するフロー図である。
図3は、本実施形態に係るモータ制御装置における異常度について説明する図である。
図4は、本実施形態に係るモータ制御装置における異常度について説明する図である。
図5は、本実施形態に係るモータ制御装置の動作結果について説明する図である。
図6は、本実施形態に係るモータ制御装置の動作結果について説明する図である。
図7は、本実施形態に係るモータ制御装置における特性値の変動について説明する図である。
図8は、本実施形態に係るモータ制御装置における特性値の変動について説明する図である。
【発明を実施するための形態】
【0009】
≪モータシステム≫
以下に、図面を参照して、本実施形態に係るモータ制御装置が用いられるモータシステムについて説明する。
【0010】
図1は、本実施形態に係るモータ制御装置の一例であるモータ制御装置100が用いられるモータシステム1の概略を示す図である。なお、モータ制御装置100は、モータの異常を検知する異常検知装置の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発電システム
21日前
マグネデザイン株式会社
ロータ
14日前
トヨタ自動車株式会社
予測方法
8日前
株式会社豊田自動織機
モータ冷却装置
14日前
株式会社ダイヘン
充電装置
16日前
日産自動車株式会社
発電機
20日前
トヨタ自動車株式会社
充電システム
23日前
住友電装株式会社
電気接続箱
21日前
住友電装株式会社
電気接続箱
21日前
マツダ株式会社
電力変換装置
21日前
トヨタ自動車株式会社
電池制御装置
3日前
住友電装株式会社
電気接続箱
9日前
住友電装株式会社
電気接続箱
9日前
ダイハツ工業株式会社
曲げ加工装置
10日前
株式会社ダイヘン
電圧調整装置
16日前
株式会社ミツバ
回転電機
21日前
トヨタ自動車株式会社
ステータ
21日前
ミネベアミツミ株式会社
モータ
23日前
新光電子株式会社
発振器
23日前
ミネベアミツミ株式会社
発電装置
23日前
ミネベアミツミ株式会社
発電装置
23日前
株式会社デンソー
電気機器
23日前
トヨタ自動車株式会社
電磁鋼板の成形方法
15日前
日本精工株式会社
モータ
22日前
ナブテスコ株式会社
駆動装置
3日前
トヨタ自動車株式会社
駆動ユニット
6日前
株式会社デンソー
携帯機
14日前
株式会社ゲットクリーンエナジー
モーター
21日前
株式会社力電
配線スペース低減型の切替盤
13日前
トヨタ紡織株式会社
電機子の製造装置
17日前
サンデン株式会社
電力変換装置
2日前
矢崎総業株式会社
電線保護構造
16日前
株式会社明電舎
ドローン
16日前
愛知電機株式会社
固定子コア、固定子および電動機
17日前
神崎産業株式会社
漏電検出装置
今日
トヨタ自動車株式会社
車両の制御装置
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ