TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084187
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023197872
出願日
2023-11-22
発明の名称
作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械
出願人
ヤンマーホールディングス株式会社
代理人
個人
,
個人
,
個人
主分類
E02F
9/26 20060101AFI20250527BHJP(水工;基礎;土砂の移送)
要約
【課題】検知装置の作動状態をオペレータが直感的に把握しやすい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供する。
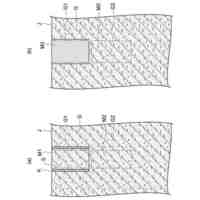
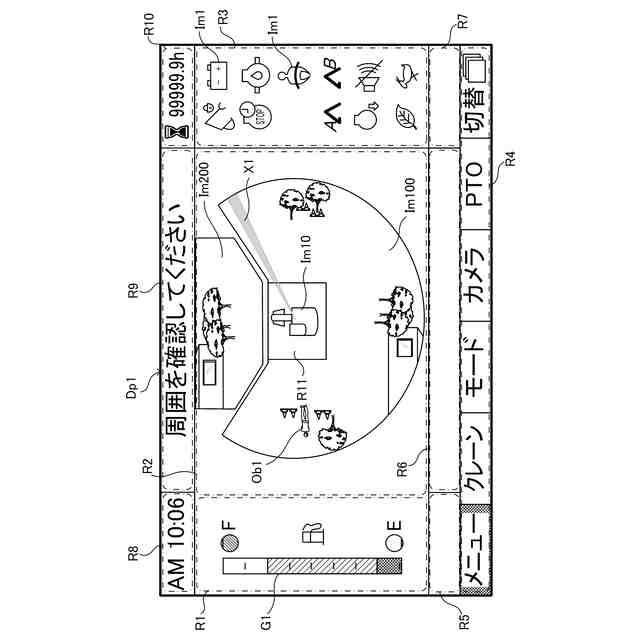
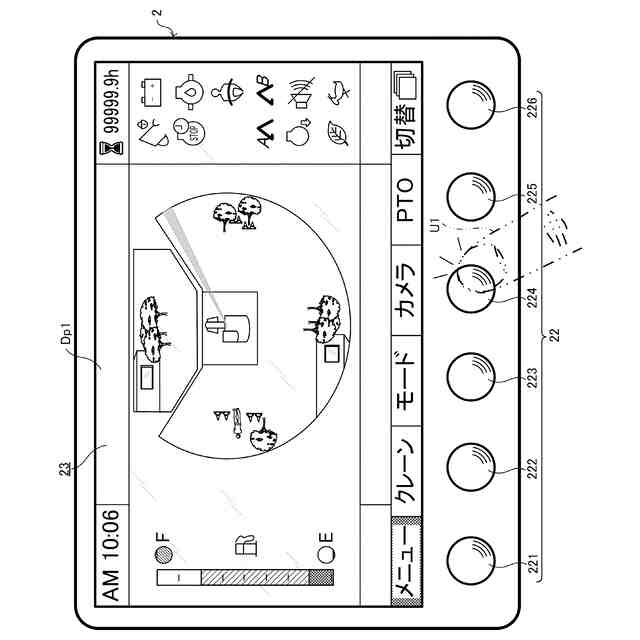
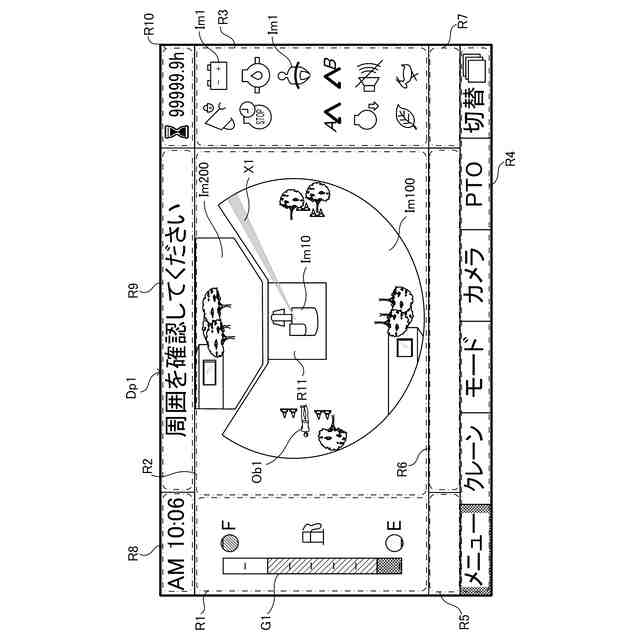
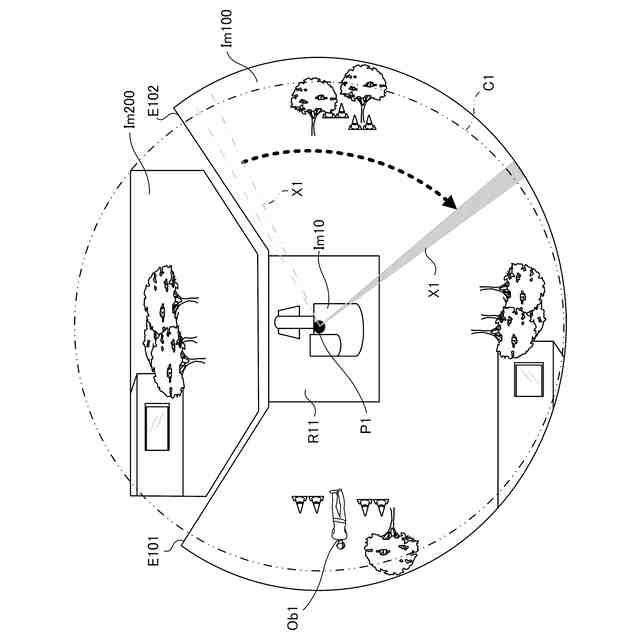
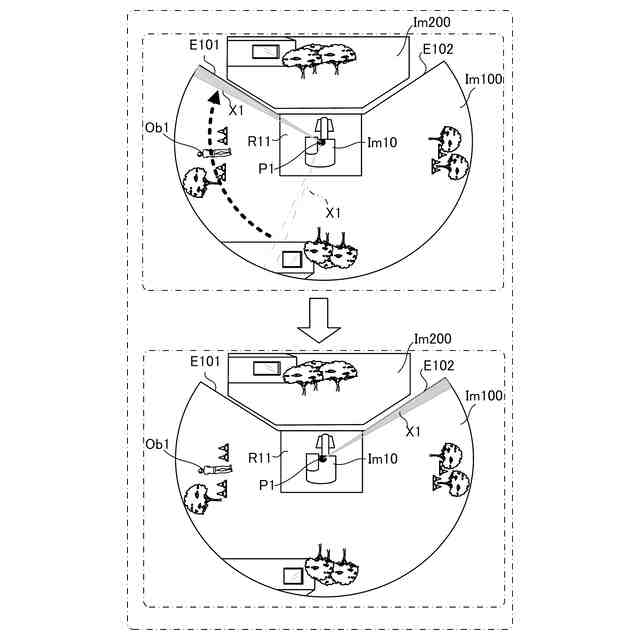
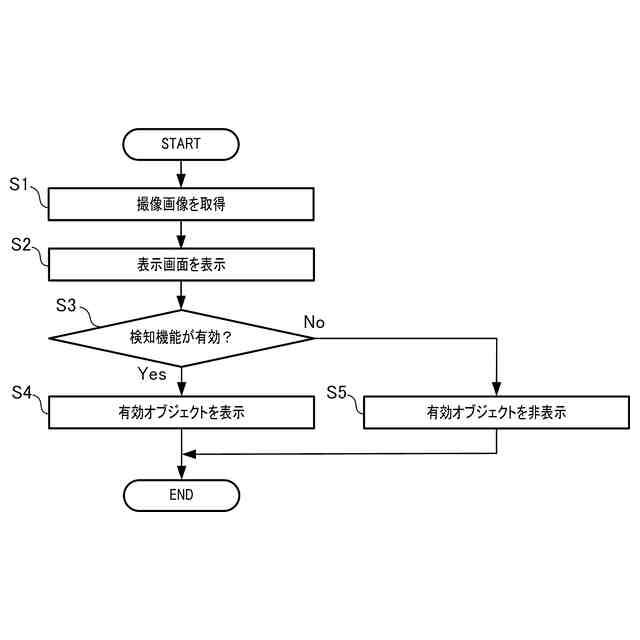
【解決手段】作業機械の制御方法は、作業機械の周囲の監視エリアの撮像画像Im100を取得することと、撮像画像Im100を含む表示画面Dp1を表示装置に表示させることと、を有する。作業機械の制御方法は、監視エリアにおける検知対象物Ob1を検知する検知処理部が有効である場合、撮像画像Im100に対して設定される基準点を中心とする仮想円の周方向と径方向との少なくとも一方に移動する有効オブジェクトX1を、表示画面Dp1における撮像画像Im100に重ねて表示すること、を更に有する。
【選択図】図5
特許請求の範囲
【請求項1】
作業機械の周囲の監視エリアの撮像画像を取得することと、
前記撮像画像を含む表示画面を表示装置に表示させることと、
前記監視エリアにおける検知対象物を検知する検知処理部が有効である場合、前記撮像画像に対して設定される基準点を中心とする仮想円の周方向と径方向との少なくとも一方に移動する有効オブジェクトを、前記表示画面における前記撮像画像に重ねて表示することと、を有する、
作業機械の制御方法。
続きを表示(約 760 文字)
【請求項2】
前記表示画面における前記基準点に機体オブジェクトを表示することを更に有する、
請求項1に記載の作業機械の制御方法。
【請求項3】
前記検知処理部の検知結果に応じて、前記有効オブジェクトの表示態様を変化させる、
請求項1又は2に記載の作業機械の制御方法。
【請求項4】
前記有効オブジェクトは、透過性を有する、
請求項1又は2に記載の作業機械の制御方法。
【請求項5】
前記撮像画像は、俯瞰画像である、
請求項1又は2に記載の作業機械の制御方法。
【請求項6】
前記有効オブジェクトは、前記仮想円の半径に沿って長さを有し、前記仮想円の周方向に移動する、
請求項1又は2に記載の作業機械の制御方法。
【請求項7】
前記撮像画像は、前記仮想円の周方向の一部である第1端から第2端までの除外範囲を欠いた形状を有し、
前記有効オブジェクトは、前記除外範囲をスキップして前記第1端から前記第2端に移動する、
請求項6に記載の作業機械の制御方法。
【請求項8】
前記有効オブジェクトは、前記基準点側から前記仮想円の外周側に向けて、前記仮想円の径方向に移動する、
請求項1又は2に記載の作業機械の制御方法。
【請求項9】
前記有効オブジェクトは、可動範囲の最外端まで移動すると、前記可動範囲の最内端に移動する、
請求項8に記載の作業機械の制御方法。
【請求項10】
請求項1又は2に記載の作業機械の制御方法を、
1以上のプロセッサに実行させるための作業機械用制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、周囲の監視エリアにおける検知対象物を検知する機能を有する作業機械に用いられる、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
関連技術として、周囲に存在する物体を検知可能な作業機械(ショベル)が知られている(例えば、特許文献1参照)。関連技術に係る作業機械は、上部旋回体に取り付けられたカメラと、表示装置と、物体検知装置と、を備える。物体検知装置は、ショベルの周囲に設定された所定の検知範囲内で所定の物体を検知する。この作業機械では、表示装置に表示される画像に、カメラ画像を表示する第1領域と、物体検知機能の作動状態を表示する第2領域と、を含む。
【先行技術文献】
【特許文献】
【0003】
国際公開2018/008542
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記関連技術では、表示装置に表示される情報量が多く、オペレータにおいては、検知処理部(物体検知機能)の作動状態を見落とす可能性があり、あるいは、検知装置の作動状態を見落とさないように表示装置を注視する必要がある。
【0005】
本発明の目的は、検知処理部の作動状態をオペレータが直感的に把握しやすい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械の制御方法は、作業機械の周囲の監視エリアの撮像画像を取得することと、前記撮像画像を含む表示画面を表示装置に表示させることと、前記監視エリアにおける検知対象物を検知する検知処理部が有効である場合、前記撮像画像に対して設定される基準点を中心とする仮想円の周方向と径方向との少なくとも一方に移動する有効オブジェクトを、前記表示画面における前記撮像画像に重ねて表示することと、を有する。
【0007】
本発明の一態様に係る作業機械用制御プログラムは、前記作業機械の制御方法を、1以上のプロセッサに実行させるためのプログラムである。
【0008】
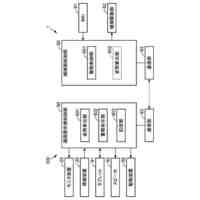
本発明の一態様に係る作業機械用制御システムは、画像取得部と、表示処理部と、を備える。前記画像取得部は、作業機械の周囲の監視エリアの撮像画像を取得する。前記表示処理部は、前記撮像画像を含む表示画面を表示装置に表示させる。前記表示処理部は、前記監視エリアにおける検知対象物を検知する検知処理部が有効である場合、前記撮像画像に対して設定される基準点を中心とする仮想円の周方向と径方向との少なくとも一方に移動する有効オブジェクトを、前記表示画面における前記撮像画像に重ねて表示する。
【0009】
本発明の一態様に係る作業機械は、前記作業機械用制御システムと、前記表示装置が搭載される機体と、を備える。
【発明の効果】
【0010】
本発明によれば、検知処理部の作動状態をオペレータが直感的に把握しやすい、作業機械の制御方法、作業機械用制御プログラム、作業機械用制御システム及び作業機械を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
インプラント杭
15日前
株式会社竹中工務店
壁接合工法
22日前
住友建機株式会社
ショベル
21日前
株式会社大林組
人工地盤構造
8日前
株式会社エコ・プランナー
取水装置
21日前
中部美化企業株式会社
水門装置
28日前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
8日前
株式会社クボタ
作業機
8日前
コベルコ建機株式会社
操作装置
22日前
株式会社プラント・ツリース
杭基礎構造
14日前
住友重機械工業株式会社
作業機械
21日前
株式会社ダイトー
護岸コンクリートの補修構造
21日前
越後商事株式会社
ツース盤
17日前
個人
狭小水域浚渫システムおよび方法
14日前
鹿島建設株式会社
設備架台の施工方法
15日前
個人
大規模真空沸騰圧密工法と大深度気水分離タンク
21日前
日鉄建材株式会社
鋼板製貯水構造物の止水構造
7日前
鹿島建設株式会社
杭施工方法
15日前
株式会社竹内製作所
土砂侵入防止構造
28日前
株式会社小松製作所
作業車両
23日前
株式会社小松製作所
作業機械
23日前
キヤノン株式会社
移動体および撮像装置
23日前
コベルコ建機株式会社
作業機械
7日前
日立建機株式会社
作業機械
今日
強化土エンジニヤリング株式会社
地盤強化工法
今日
コベルコ建機株式会社
操作装置及び操作システム
22日前
ノザキ建工株式会社
鋼管杭
9日前
株式会社大林組
施工管理システム及び施工管理方法
21日前
株式会社大林組
物体の設置方法
15日前
株式会社アイガー産業
止水装置
14日前
株式会社みつば電気
水力発電設備
24日前
株式会社荒谷建設コンサルタント
水力駆動除塵装置
23日前
ノザキ建工株式会社
鋼管杭
9日前
イワフジ工業株式会社
掘削グラップル装置及び油圧ショベル
14日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ