TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084124
公報種別
公開特許公報(A)
公開日
2025-06-02
出願番号
2024202717
出願日
2024-11-20
発明の名称
ツール用の改良型ラチェット機構
出願人
ゴーティエ バイオメディカル インコーポレイテッド
,
GAUTHIER BIOMEDICAL,INC.
代理人
個人
,
個人
,
個人
主分類
B25G
1/00 20060101AFI20250526BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
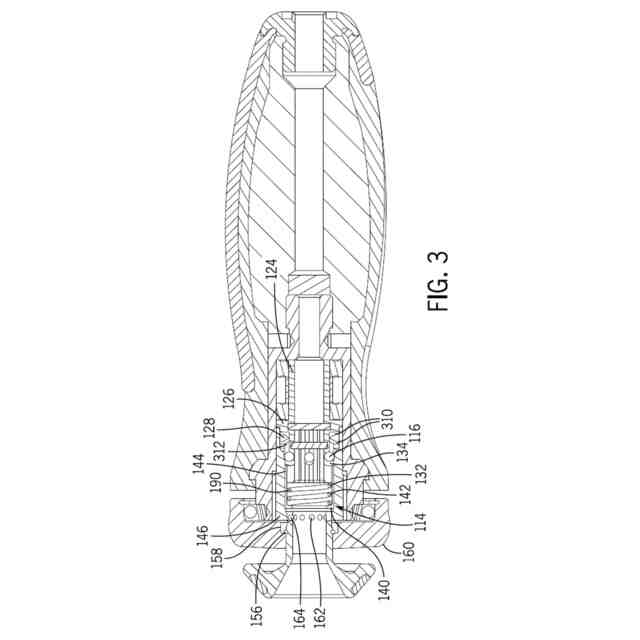
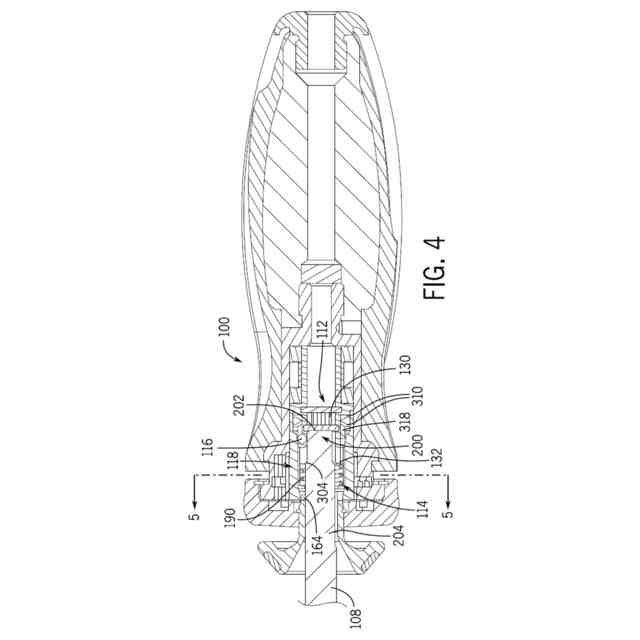
【課題】様々な器具の軸のツールへの取り付けおよびツールからの解除、ならびに軸の回転方向の制御を可能にする、ツール用ラチェット機構が提供される。
【解決手段】本開示のツール用ラチェット機構は、ラチェット機構のためのハウジングに係合してリバースキャップまたは端部キャップを保持するための外部固定要素または係合要素を排除する。本開示の構造では、ラチェット機構の内部の構成要素のみを使用してラチェット機構の動作を制御する際に使用するために、リバースキャップをハウジング上に保持することができ、リバースキャップは、ラチェット機構の外部要素への露出を制限するとともに、ラチェット機構の構造を簡素化する。
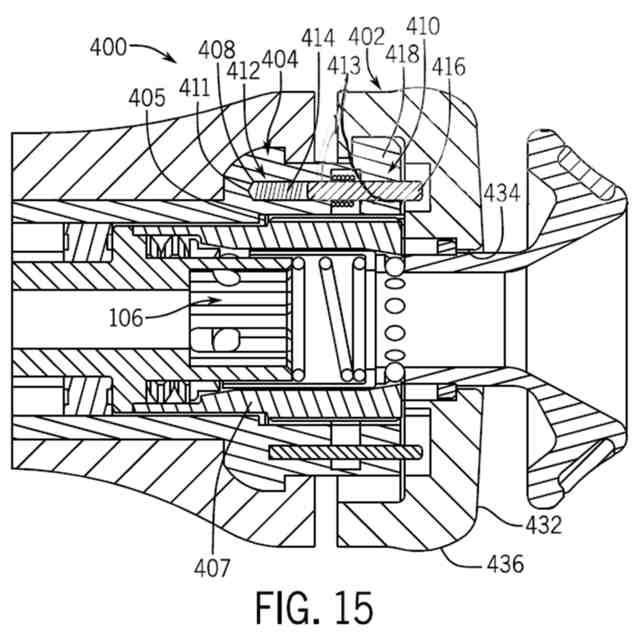
【選択図】図15
特許請求の範囲
【請求項1】
ツール用のラチェット機構であって、
a)中央通路と、前記中央通路に隣接してハウジング内に移動可能に配置される1つ以上の爪部と、前記ハウジングの周囲に沿って形成される複数のロック凹部と、前記中央通路から離間され、その中に配置される、付勢されたロックピンを含むボアと、を含むハウジングと、
b)前記中央通路内に配置され、前記1つ以上の爪部と選択的に係合可能なギアと、
c)前記ギア上で前記ハウジングと係合するリバースキャップであって、1つ以上の爪部係合ポケットが形成された内面を含む上壁と、前記上壁から外向きに延在する周囲側壁と、前記側壁の周囲に沿って形成された複数のロックタブと、を含むリバースキャップと、を備え、
前記複数のロックタブは、前記複数のロック凹部と位置合わせ可能であり、前記複数のロック凹部に挿入可能であり、前記ハウジングに対して回転可能であり、
前記ロックピンは、前記ハウジングからの前記リバースキャップの係合解除を防止するために、前記ハウジングに対する前記リバースキャップの回転止めとして機能するように、前記1つ以上のポケットのうちの1つの中に配置可能である、ラチェット機構。
続きを表示(約 870 文字)
【請求項2】
前記付勢されたロックピンは、前記ボアと前記ロックピンとの間で前記ボア内に配置されるばねを含む、請求項1に記載のラチェット機構。
【請求項3】
前記1つ以上のポケットのうちの前記1つは、前記ハウジングに対する前記リバースキャップの回転止めとして機能するように、前記ロックピンと係合可能な縁部を含む、請求項1に記載のラチェット機構。
【請求項4】
前記ラチェット機構は、前記リバースキャップを前記ハウジングと係合させる外部保持リングを含まない、請求項1に記載のラチェット機構。
【請求項5】
前記ロックピンによって前記ハウジング内に固定され、前記1つ以上の爪部のうちの1つと係合される爪付勢部をさらに備える、請求項1に記載のラチェット機構。
【請求項6】
前記ハウジングの周囲に沿って形成される少なくとも2つのロック凹部と、前記側壁の周囲に沿って形成される少なくとも2つのロックタブと、をさらに備える、請求項1に記載のラチェット機構。
【請求項7】
前記少なくとも2つのロック凹部および前記少なくとも2つのロックタブは、前記ロックピンが前記1つ以上のポケットのうちの前記1つの中に配置されていないときに位置合わせ可能である、請求項6に記載のラチェット機構。
【請求項8】
前記少なくとも2つのロック凹部および前記少なくとも2つのロックタブは、前記ロックピンが前記1つ以上のポケットのうちの前記1つの中に配置されていないとき、位置合わせ可能ではない、請求項6に記載のラチェット機構。
【請求項9】
a)ハンドルと、
b)前記ハンドル内に配置される、請求項1に記載のラチェット機構と、を備える、ツール。
【請求項10】
前記ラチェット機構と位置合わせして前記ハウジング内に少なくとも部分的に配置される軸固定機構をさらに備える、請求項9に記載のツール。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ハンドツールに関し、より具体的には、ハンドツールに解放可能に固定された様々な器具および軸の動きを制御するためのラチェット機構に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ハンドツールは、個人が様々な作業を行うことを可能にする様々な用途のために設計されている。これらのツールは、ツールをより確実に操作するために個人が把持することができるハンドルを含む。
【0003】
このタイプの多くのツールは、ツールに取り外し可能に取り付けられた取り付け軸を有する、多くの異なる器具をツールが有することを可能にする、様々な機構を含む。これらの機構は、器具の軸がツールに取り付けられるとともに交換可能な方法でツールと共に利用されることを可能にすることで、複数の取り外し可能なアタッチメントを有する単一のツールがツールのための様々な機能を提供することを可能にする。
【0004】
しかしながら、このタイプの機構によく見られる欠点の1つは、機構が、ツールおよび器具の使用中に器具がツールに対して位置ずれすることまたは位置ずれするようになることを防止するように器具軸を器具に取り付けることができず、その結果、器具をツールと適切に位置合わせして再配置するために、器具をツールから取り外して再び取り付けることがしばしば必要であることである。
【0005】
加えて、このタイプの機構によく見られる別の欠点は、器具の軸とツールとの間の接続が完全に厳密ではなく、ハンドルと器具との間の移動、トグル、または遊びの量がユーザに知覚されることである。これは、使用中の不具合、またはツールの性能における品質または信頼性の低下につながる可能性がある。
【0006】
このタイプの機構に対する改良は、「ツール用の軸固定機構(Shaft Securing Mechanism For A Tool)」と題された特許文献1、および「ツール用の改良型軸固定機構(Improved Shaft Securing Mechanism For A Tool)」と題された特許文献2に見出され、その全体は、それぞれ、あらゆる目的のために参照することによって本明細書に明示的に組み込まれる。しかしながら、従来技術の機構の特定の欠点に対処する一方で、様々なタイプのツールに存在する軸固定機構および他の機構に対して、依然として改善が可能である。
【0007】
特に、ツール用の軸固定機構および/またはラチェット制御機構の構造に関して、機構は、機構の適切な動作を可能にする軸固定機構/ラチェット制御機構の構造内に多くの構成要素を含む。構成要素の各々は、軸固定機構および/またはラチェット制御機構が所望に応じて動作することを可能にする一方で、1つまたは複数の機構の組み立てに必要とされる構成要素の数およびタイプは各々、故障の可能性および結果として生じる1つまたは複数の機構の動作不能をもたらす。
【0008】
したがって、器具が機構を利用してツールに固定されるとともに使用されるときに、ツールに対する器具の軸のアラインメントを維持しながら、ツールに係合する様々な交換可能な器具を固定し、解放し、および/またはその回転を制御するように容易に操作することができる、ツール用の軸固定機構および/またはラチェット制御機構を開発することが望ましい。
【0009】
さらに、器具の軸とツールとの間に完全に厳密な接続部を有することで、器具とハンドルとの間の実際のまたは知覚されるトグルまたは遊びを排除する、ツール用の固定機構および/またはラチェット制御機構を開発することが望ましい。
【0010】
加えて、固定機構および/またはラチェット機構の潜在的な故障箇所を限定するために、簡略化された構造を有する固定機構および/またはラチェット制御機構を開発することが望ましい。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
3日前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
6日前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
8日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
17日前
株式会社スター精機
吸着パッド
2日前
学校法人五島育英会
アーム機構
8日前
株式会社スター精機
吸着パッド
2日前
株式会社PILLAR
チューブ保持治具
13日前
株式会社イノウ
給油口キャップ用開閉具
1か月前
川崎重工業株式会社
制動システム
1か月前
住友重機械工業株式会社
ロボット
28日前
株式会社アイエイアイ
グリッパー
23日前
庄内機械株式会社
釘打装置
21日前
オークラ輸送機株式会社
ハンド装置
16日前
株式会社スター精機
産業用ロボット
今日
株式会社不二越
垂直多関節ロボット
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
21日前
株式会社マキタ
電動作業機
9日前
株式会社マキタ
電動作業機
9日前
株式会社リコー
多関節ロボット
7日前
芝浦機械株式会社
双腕ロボット
27日前
株式会社安川電機
ロボット
今日
株式会社安川電機
ロボット
今日
株式会社ダイヘン
ロボット制御システム
6日前
トヨタ自動車株式会社
荷姿影響緩和方法
24日前
株式会社安川電機
ロボット
今日
セイコーエプソン株式会社
ロボット
2日前
株式会社デンソーウェーブ
ロボット制御システム
1か月前
パナソニック株式会社
工具
1か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
2日前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ