TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025082342
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023195594
出願日
2023-11-17
発明の名称
死角領域推定装置、走行環境作成装置、車両制御装置及び車両
出願人
株式会社日立製作所
代理人
ポレール弁理士法人
主分類
G08G
1/16 20060101AFI20250522BHJP(信号)
要約
【課題】車両の観測領域における死角領域を推定する。
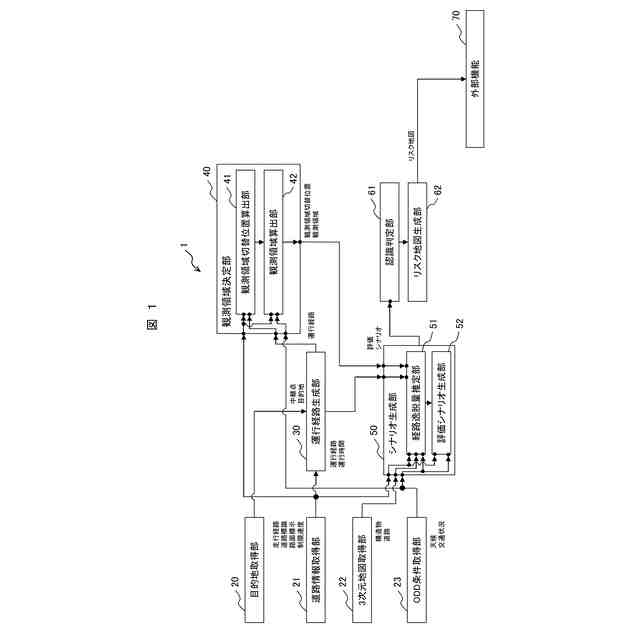
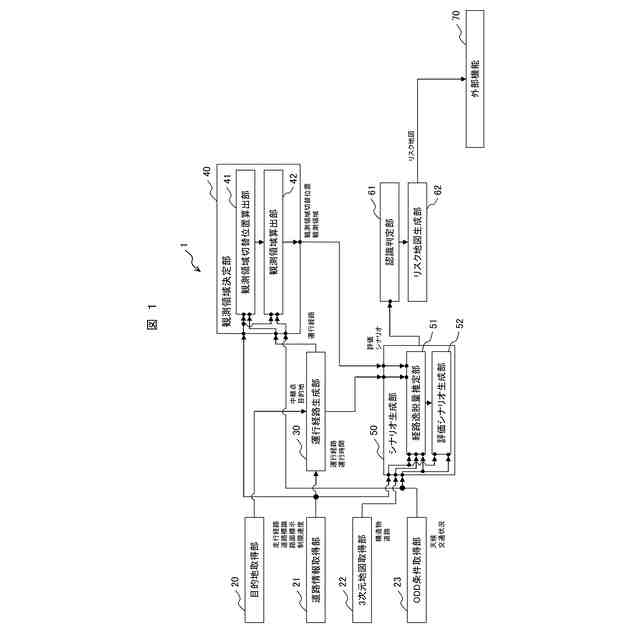
【解決手段】観測領域をセンシングして取得したデータに基づき自動運転を行う車両の観測領域における死角領域の推定装置であって、車両の運行経路を算出する運行経路生成部と、運行経路が他の移動体の移動経路と交差する場合に、観測領域を第1の観測領域から第2の観測領域に切り替える観測領域切替位置を算出する観測領域切替位置算出部と、第2の観測領域を算出する観測領域算出部と、運行経路についての環境条件が異なる複数の評価シナリオを生成するシナリオ生成部と、各評価シナリオに沿って、車載センサによる第2の観測領域のセンシングをシミュレートし、第2の観測領域内の他の移動体の認識成否を判定する認識判定部と、複数の評価シナリオについての認識成否結果を統合して第2の観測領域における死角領域を第2の観測領域に重畳して示すリスク地図を生成するリスク地図生成部と、を有する。
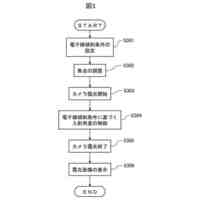
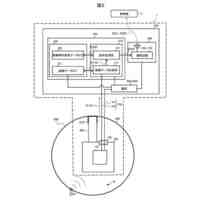
【選択図】図1
特許請求の範囲
【請求項1】
観測領域を設定し、センサにより前記観測領域をセンシングして取得したデータに基づき自動運転を行う車両における前記観測領域における死角領域を推定する死角領域推定装置であって、
前記車両の目的地までの運行経路を算出する運行経路生成部と、
前記運行経路が他の移動体の移動経路と交差する場合に、前記観測領域を第1の観測領域から第2の観測領域に切り替える観測領域切替位置を算出する観測領域切替位置算出部と、
前記観測領域切替位置に対応して、前記第2の観測領域を算出する観測領域算出部と、
前記運行経路についての所定の環境条件が異なる複数の評価シナリオを生成するシナリオ生成部と、
前記評価シナリオのそれぞれについて、当該環境条件における前記車両に搭載されたセンサによる前記第2の観測領域のセンシングをシミュレートし、前記第2の観測領域内に位置する前記他の移動体の認識成否を判定する認識判定部と、
複数の前記評価シナリオについての前記第2の観測領域における前記他の移動体の認識成否結果を統合して前記第2の観測領域における死角領域を前記第2の観測領域に重畳して示すリスク地図を生成するリスク地図生成部と、
を有する死角領域推定装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の死角領域推定装置であって、
前記観測領域切替位置算出部は、前記運行経路と前記移動経路との交点の位置から所定距離分だけ前記運行経路を遡った位置を前記観測領域切替位置として算出する死角領域推定装置。
【請求項3】
請求項1に記載の死角領域推定装置であって、
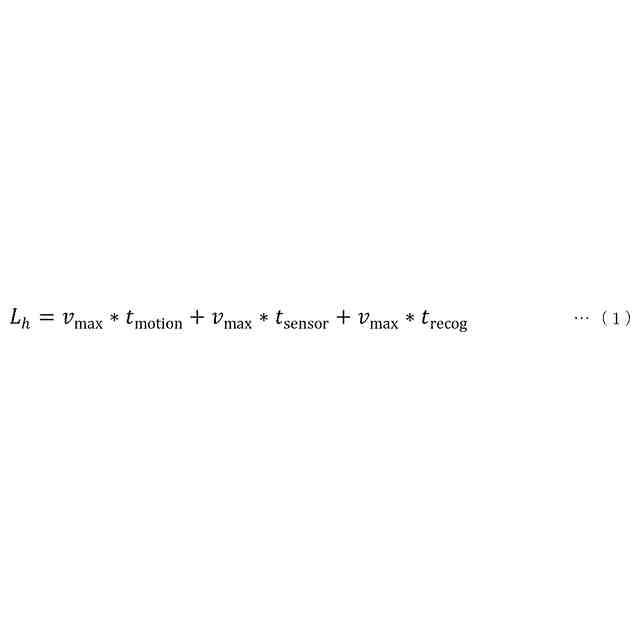
前記観測領域算出部は、前記移動経路に平行な方向を第1方向とした場合に、前記運行経路と前記移動経路との交点の位置に基づき、前記第1方向についての前記第2の観測領域の位置を算出し、前記他の移動体の移動速度と、前記観測領域切替位置を通過したときから前記第2の観測領域を通過するまでの時間と、前記センサのセンサデータの取得周期と、物体認識の処理時間とに基づき、前記第1方向についての前記第2の観測領域の幅を算出する死角領域推定装置。
【請求項4】
請求項1に記載の死角領域推定装置であって、
前記観測領域切替位置算出部は、前記運行経路が複数の前記移動経路のそれぞれと交差し、前記運行経路と前記移動経路との交点が複数ある場合に、複数の前記交点をグループに分け、前記グループごとに前記観測領域切替位置を算出する死角領域推定装置。
【請求項5】
請求項4に記載の死角領域推定装置であって、
前記移動経路は、車両の移動経路または歩行者の移動経路の少なくとも2種別あり、
前記観測領域切替位置算出部は、前記運行経路と交差する前記移動経路の種別によって複数の前記交点を前記グループに分ける死角領域推定装置。
【請求項6】
請求項4に記載の死角領域推定装置であって、
前記観測領域切替位置算出部は、前記グループ内の前記交点のうち、前記車両が最初に通過すると想定される前記交点の位置から所定距離分だけ前記運行経路を遡った位置を前記観測領域切替位置として算出する死角領域推定装置。
【請求項7】
請求項1に記載の死角領域推定装置であって、
前記運行経路に対する前記車両の位置誤差及び方位誤差を算出する経路逸脱量推定部をさらに有し、
前記認識判定部は、前記位置誤差及び前記方位誤差が付与された位置及び向きにある前記車両に搭載された前記センサによる前記第2の観測領域のセンシングをシミュレートする死角領域推定装置。
【請求項8】
請求項1に記載の死角領域推定装置であって、
前記リスク地図生成部は、前記リスク地図において、前記第2の観測領域を複数のグリッドで表し、前記複数のグリッドのそれぞれの領域種別を、可視領域、死角領域または条件付き死角領域に分類する死角領域推定装置。
【請求項9】
請求項8に記載の死角領域推定装置であって、
前記可視領域は、前記認識判定部が複数の前記評価シナリオの全てにおいて認識成功と判定した領域を表し、
前記死角領域は、前記認識判定部が複数の前記評価シナリオの全てにおいて認識失敗と判定した領域を表し、
前記条件付き死角領域は、前記認識判定部が複数の前記評価シナリオの一部において認識成功と判定した領域を表す死角領域推定装置。
【請求項10】
請求項1に記載の死角領域推定装置であって、
前記環境条件は、天候又は走行時間帯である死角領域推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、死角領域推定装置、走行環境作成装置、車両制御装置及び車両に関するものである。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
自動運転では、他車両等の存在を確認するために車両から見る必要がある観測領域を、車両に搭載されたセンサがセンシングし、センサの取得するデータに基づいて車両の制御が行われる。そのため、車両に搭載されたセンサが車両の観測領域を適切にセンシングするように、センサの検知する領域を適切に設定する必要がある。
【0003】
車両に搭載されたセンサの検知領域を設定する技術として、特許文献1が知られている。特許文献1では、段落0031に「レーダー装置11は、ECU13の指示に応じて動作のモードを視野角優先モード、または距離優先モードの何れかのモードに切り替えて動作する。視野角優先モードは、例えば、図2のように、最大検出距離が比較的短く、水平方向の視野角が比較的広い検知領域SA1で物体を検出するモードである。」と記載され、段落0032に「距離優先モードは、例えば、図3のように、最大検出距離が比較的長く、水平方向の視野角が比較的狭い検知領域SA2で物体を検出するモードである。」と記載されている。
【0004】
そして、レーダー装置11を制御するECU13が実行する処理について、段落0041に「ECU13は、自車両100の進行先に交差点またはカーブが存在していると判定した場合、処理をステップS3へ進める。一方、ECU13は、自車両100の進行先に交差点またはカーブが存在していないと判定した場合、処理をステップS5へ進める。」と記載され、段落0042に「ステップS3において、ECU13は、他車両位置を取得したか否か判定する。・・・ECU13は、他車両位置を取得したと判定した場合、処理をステップS4へ進める。一方、ECU13は、他車両位置を取得していないと判定した場合、処理をステップS5へ進める。」と記載されている。また、段落0043に「ステップS4において、ECU13は、レーダー装置11を距離優先モードに設定する。」と記載され、段落0044に「ステップS5において、ECU13は、レーダー装置11を視野角優先モードに設定する。」と記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2011-253241号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のようにセンサの検知領域が設定された場合であっても、天候や時間帯によっては、センサの検知領域内に死角領域ができることがある。そして、センサの検知領域における死角領域が車両の観測領域と重なる場合、車両の観測領域にも死角領域ができることになる。このような死角領域を推定することができれば、死角領域をセンシングできるように環境中にインフラセンサを設置する等により、死角領域を補完することができ、自動運転の安全性の向上につながる。
【0007】
そこで、本発明では、車両の観測領域における死角領域を推定する死角領域推定装置、走行環境作成装置、車両制御装置及び車両を提供することを目的とする。
【課題を解決するための手段】
【0008】
本開示の死角領域推定装置は、例えば、観測領域を設定し、センサにより前記観測領域をセンシングして取得したデータに基づき自動運転を行う車両における前記観測領域における死角領域を推定する死角領域推定装置であって、前記車両の目的地までの運行経路を算出する運行経路生成部と、前記運行経路が他の移動体の移動経路と交差する場合に、前記観測領域を第1の観測領域から第2の観測領域に切り替える観測領域切替位置を算出する観測領域切替位置算出部と、前記観測領域切替位置に対応して、前記第2の観測領域を算出する観測領域算出部と、前記運行経路についての所定の環境条件が異なる複数の評価シナリオを生成するシナリオ生成部と、前記評価シナリオのそれぞれについて、当該環境条件における前記車両に搭載されたセンサによる前記第2の観測領域のセンシングをシミュレートし、前記第2の観測領域内に位置する前記他の移動体の認識成否を判定する認識判定部と、複数の前記評価シナリオについての前記第2の観測領域における前記他の移動体の認識成否結果を統合して前記第2の観測領域における死角領域を前記第2の観測領域に重畳して示すリスク地図を生成するリスク地図生成部と、を有する。
【0009】
また、本開示の走行環境作成装置は、例えば、観測領域を設定し、センサにより前記観測領域をセンシングして取得したデータに基づき自動運転を行う車両における前記観測領域における死角領域を推定する走行環境作成装置であって、前記車両の目的地までの運行経路を算出する運行経路生成部と、前記運行経路が他の移動体の移動経路と交差する場合に、前記観測領域を第1の観測領域から第2の観測領域に切り替える観測領域切替位置を算出する観測領域切替位置算出部と、前記観測領域切替位置に対応して、前記第2の観測領域を算出する観測領域算出部と、前記車両に搭載されたセンサによるセンシングデータから前記車両による周辺環境の観測状態を示すリスク地図を生成するリスク地図生成部と、前記リスク地図と前記第2の観測領域とを重畳して表示する死角領域描画部と、を有する。
【0010】
また、本開示の車両制御装置は、例えば、前記死角領域推定装置により算出された前記運行経路、前記観測領域切替位置、及び前記観測領域に従って前記車両を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
軌条車両
19日前
株式会社日立製作所
回転電機
18日前
株式会社日立製作所
気体圧縮装置
15日前
株式会社日立製作所
電力変換装置
29日前
株式会社日立製作所
乗客コンベア
29日前
株式会社日立製作所
乗客コンベア
29日前
株式会社日立製作所
エレベーター
29日前
株式会社日立製作所
設計支援装置
9日前
株式会社日立製作所
エレベーター
29日前
株式会社日立製作所
エレベーター
29日前
株式会社日立製作所
電力変換装置
23日前
株式会社日立製作所
電力変換装置
29日前
株式会社日立製作所
電力変換装置
29日前
株式会社日立製作所
鉄道車両用台車
10日前
株式会社日立製作所
荷電粒子線装置
4日前
株式会社日立製作所
水電解システム
22日前
株式会社日立製作所
軌道計画システム
18日前
株式会社日立製作所
回路設計支援装置
11日前
株式会社日立製作所
電力調整システム
3日前
株式会社日立製作所
漏水検出システム
29日前
株式会社日立製作所
エレベーター装置
29日前
株式会社日立製作所
エレベーター装置
29日前
株式会社日立製作所
作業支援システム
16日前
株式会社日立製作所
融通取引提案システム
1日前
株式会社日立製作所
設計支援装置及び方法
12日前
株式会社日立製作所
再生品販売支援システム
18日前
株式会社日立製作所
電力変換装置の冷却構造
29日前
株式会社日立製作所
巻上機及びエレベーター
29日前
株式会社日立製作所
診断装置および診断方法
15日前
株式会社日立製作所
乗りかご及びエレベーター
18日前
株式会社日立製作所
外転型回転電機及び巻上機
12日前
株式会社日立製作所
乗り場ドア及びエレベーター
19日前
株式会社日立製作所
電池診断装置、電池診断方法
3日前
株式会社日立製作所
設計支援システムおよび方法
19日前
株式会社日立製作所
ガイドレールの高さ調整装置
29日前
株式会社日立製作所
制御装置、及び情報提示方法
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ