TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025074640
公報種別
公開特許公報(A)
公開日
2025-05-14
出願番号
2023185597
出願日
2023-10-30
発明の名称
制御装置、及び情報提示方法
出願人
株式会社日立製作所
代理人
藤央弁理士法人
主分類
G06T
19/00 20110101AFI20250507BHJP(計算;計数)
要約
【課題】作業者の作業情報を取得し理想的な動作・状態との乖離を検出して、コンテンツを動的に制御することにより、作業者の作業効率を向上する。
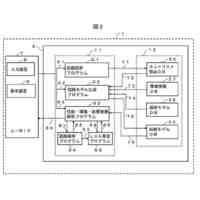
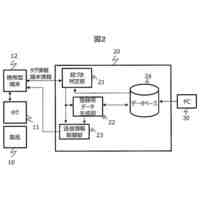
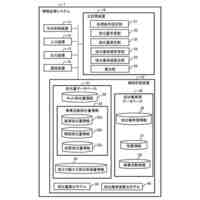
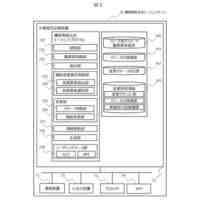
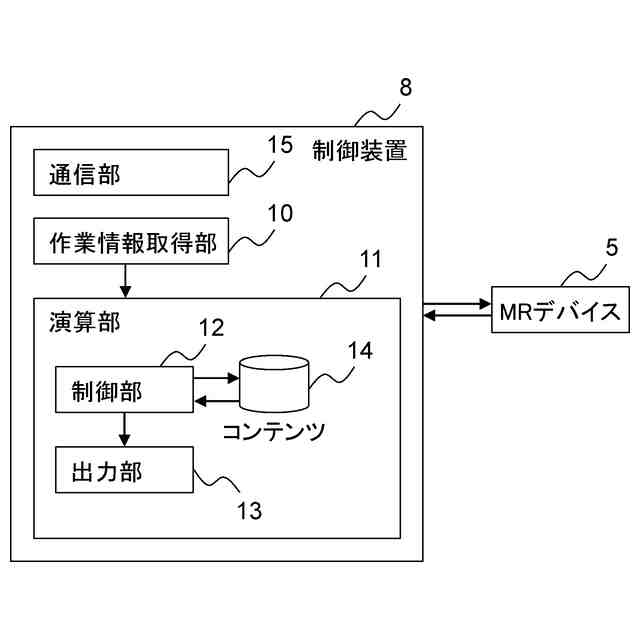
【解決手段】クロスリアリティを利用して三次元の動作を作業者に提示する制御装置8であって、作業情報取得部10、演算部11及び通信部15を有する。演算部は、制御部12、出力部13及びコンテンツデータベース14を有する。作業情報取得部は、作業員の作業情報を撮像装置やMRデバイス5から取得する。作業情報は、作業員の動作に関する情報である。制御部は、作業者の作業情報を解析し、模範的な動作及び状態を表す連続的教示コンテンツに含まれる模範作業と実際の作業との空間的乖離度を算出し、算出結果に基づいて連続的教示コンテンツの表示方法を動的に制御する。コンテンツデータベースは、作業者に提示する連続的教示コンテンツを格納する。通信部は、他の装置との通信を制御する。
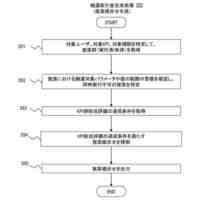
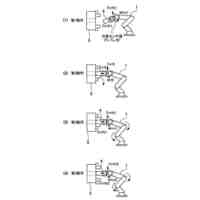
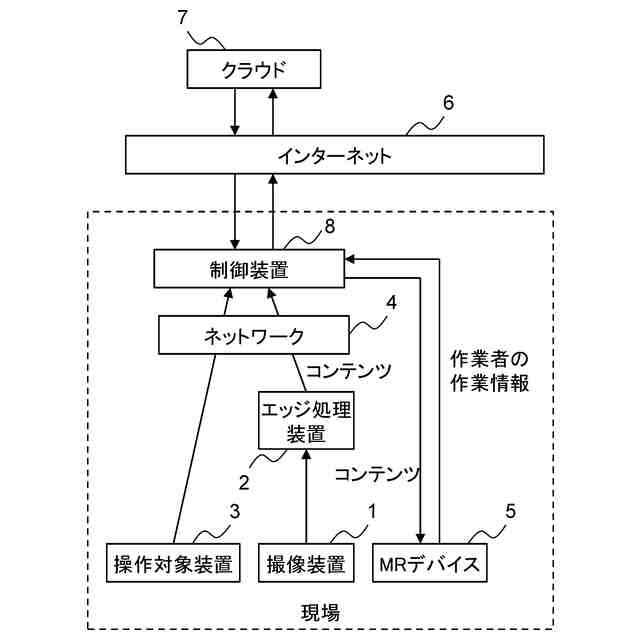
【選択図】図3
特許請求の範囲
【請求項1】
クロスリアリティを利用して三次元の動作を作業者に提示する制御装置であって、
所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを有する計算機によって構成され、
前記演算装置が、前記作業者が行っている作業の作業情報を取得する取得部と、
前記演算装置が、当該作業者が行っている作業に対応する連続的教示コンテンツを前記作業者に提示するための演算を実行する演算部と、
前記演算装置が、コンテンツを出力する出力部とを備え、
前記演算部は、前記取得部が取得した作業情報と前記連続的教示コンテンツとの空間的乖離度に応じて、前記連続的教示コンテンツの表示方法を動的に制御する制御部を有することを特徴とする制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記制御部は、前記作業情報と前記連続的教示コンテンツとの空間的乖離度に応じて、前記連続的教示コンテンツの提示速度を変更することを特徴とする制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記制御部は、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が所定の閾値より大きい場合、前記連続的教示コンテンツの再生速度を低下する又は前記連続的教示コンテンツの再生を停止することを特徴とする制御装置。
【請求項4】
請求項2に記載の制御装置であって、
前記制御部は、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が所定の閾値より大きい場合、前記連続的教示コンテンツを逆再生することを特徴とする制御装置。
【請求項5】
請求項2に記載の制御装置であって、
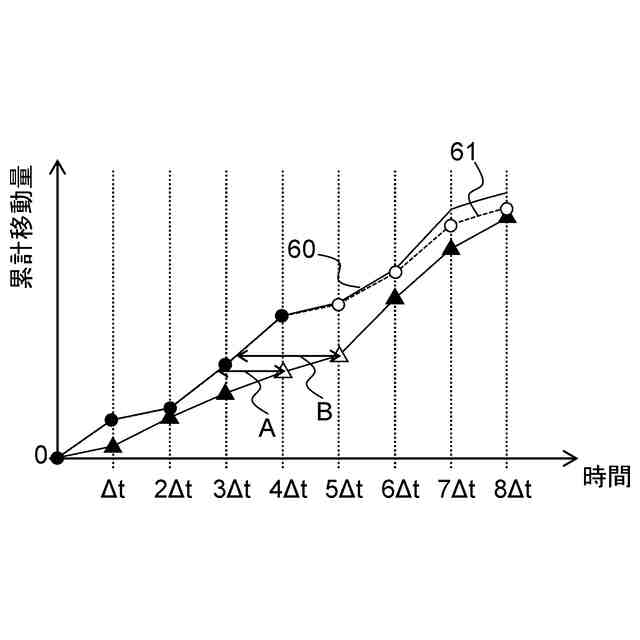
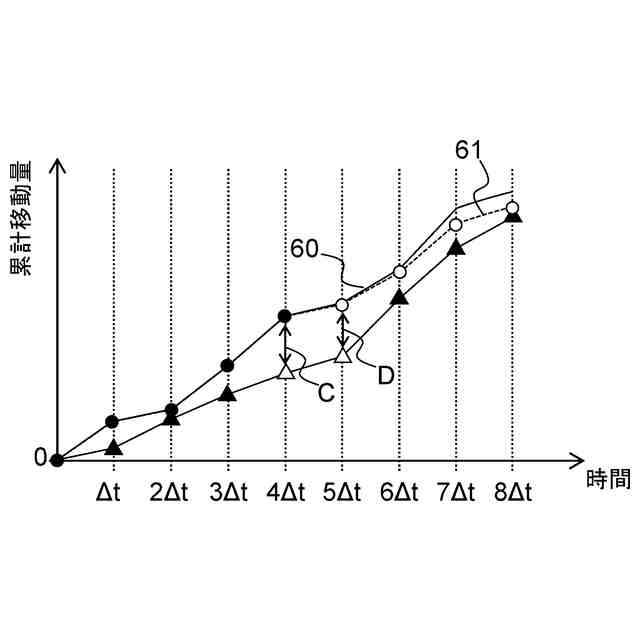
前記制御部は、前記作業情報に含まれる特徴点のうち、所定時間内における位置変化が最も大きい第1特徴点と、前記第1特徴点に対応する前記連続的教示コンテンツに含まれる第2特徴点とが同一の空間移動量となる時刻が所定の閾値以上離れている場合、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が大きいと判定することを特徴とする制御装置。
【請求項6】
請求項2に記載の制御装置であって、
前記制御部は、前記作業情報に含まれる特徴点のうち、所定時間内における位置変化が最も大きい第1特徴点の空間移動量と、前記第1特徴点に対応する前記連続的教示コンテンツに含まれる第2特徴点の空間移動量との同一時刻における距離が所定の閾値以上離れている場合、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が大きいと判定することを特徴とする制御装置。
【請求項7】
請求項2に記載の制御装置であって、
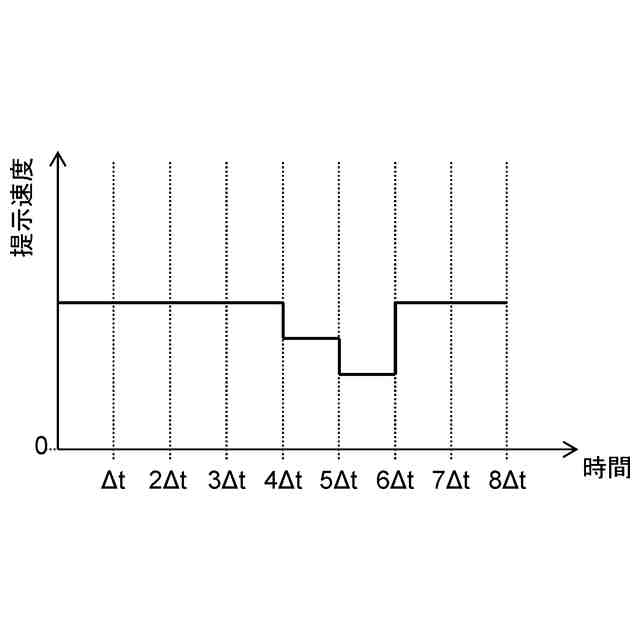
前記制御部は、前記空間的乖離度によって、前記連続的教示コンテンツの提示速度を複数の段階に制御することを特徴とする制御装置。
【請求項8】
請求項2に記載の制御装置であって、
前記制御部は、前記作業情報に含まれる前記作業者の身体の第1特徴点と、前記第1特徴点に対応する前記連続的教示コンテンツに含まれるアバターの身体の第2特徴点との距離が所定の閾値以上離れている場合、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が大きいと判定することを特徴とする制御装置。
【請求項9】
請求項2に記載の制御装置であって、
前記制御部は、前記作業者が前記連続的教示コンテンツを視聴していない場合、前記作業情報と前記連続的教示コンテンツとの空間的乖離度が大きいと判定することを特徴とする制御装置。
【請求項10】
請求項1に記載の制御装置であって、
前記制御部は、前記取得部が取得した作業情報に応じて作成された付加情報を前記連続的教示コンテンツに付加することを特徴とする制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業者へ情報を提示する制御装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
現場作業員へ作業内容を指示する方法として、従来では紙媒体によるマニュアル又はタブレット端末に表示されるマニュアルが広く使用されている。最近では、ヘッドマウントディスプレイとXR(クロスリアリティ)技術を用いて、現実空間に重畳された作業手順画像を確認することで、作業内容を指示する取り組みがある。
【0003】
拡張現実空間を用いて作業内容を指示するシステムとして、以下の先行技術がある。特許文献1(特開2023-16589号公報)には、点検者の顔の前方を撮像するカメラと、画像を表示するための点検者用表示装置と、画像を表示するための表示装置と、データベースアクセス手段により取り出された点検作業順情報に基づき点検作業の順番を示す順番符号画像を作成し、この順番符号画像を、前記点検対象作業箇所特定手段が特定した点検対象装置現時点画像における点検対象作業箇所の該当点検対象作業箇所に付した如くなるように位置変更して表示用順番符号画像を作成する点検作業支援システムが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-16589公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような作業システムでは、作業内容を指示するコンテンツを作業者が見逃すことがある。このようなコンテンツの見逃しは、コンテンツがMRデバイスの視野角の外に表示される要因と、作業者がコンテンツと異なる作業をした際に、視野がコンテンツから離れた位置に移動する要因がある。また、コンテンツが動的に動く場合には、作業者がコンテンツの移動速度に追従できないことによっても発生する。このような場合に、コンテンツを視野内に戻すための補助を提供することが求められる。
【0006】
前述した特許文献1に記載された点検作業支援システムは、点検対象作業箇所から所定距離を超えて点検者の目による視点が外れていることが検出された場合に表示用順番符号画像の表示を停止させる。しかしながら、点検者に対して点検対象作業箇所を明示しておらず、点検対象作業箇所を見失う課題がある。また、三次元的なコンテンツを扱わないことから、複雑な形状や動作に対する作業指示が困難である課題がある。
【0007】
本発明は、作業者の作業情報を取得し、模範的な動作や状態との乖離を検出して、コンテンツの再生を動的に制御することによって、作業者の作業効率の向上を目的とする。
【課題を解決するための手段】
【0008】
本願において開示される発明の代表的な一例を示せば以下の通りである。すなわち、クロスリアリティを利用して三次元の動作を作業者に提示する制御装置であって、所定の演算処理を実行する演算装置と、前記演算装置がアクセス可能な記憶装置とを備える計算機によって構成され、前記演算装置が、前記作業者が行っている作業の作業情報を取得する取得部と、前記演算装置が、当該作業者が行っている作業に対応する連続的教示コンテンツを前記作業者に提示するための演算を実行する演算部と、前記演算装置が、コンテンツを出力する出力部とを有し、前記演算部は、前記取得部が取得した作業情報と前記連続的教示コンテンツとの空間的乖離度に応じて、前記連続的教示コンテンツの表示方法を動的に制御する制御部を有することを特徴とする。
【発明の効果】
【0009】
本発明の一態様によれば、作業者の作業情報を取得し理想的な動作・状態との乖離を検出して、コンテンツを動的に制御することにより、作業者の作業効率を向上できる。前述した以外の課題、構成及び効果は、以下の実施例の説明によって明らかにされる。
【図面の簡単な説明】
【0010】
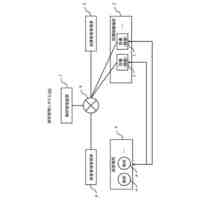
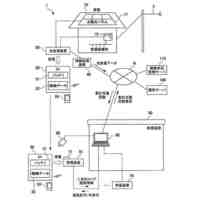
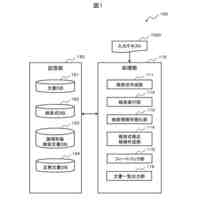
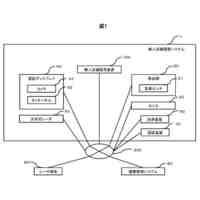
実施例1の作業支援システムの構成を示す図である。
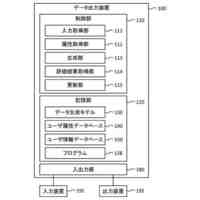
実施例1の作業支援システムに設けられるコンピュータの物理的な構成を示すブロック図である。
実施例1の制御装置の論理ブロック図である。
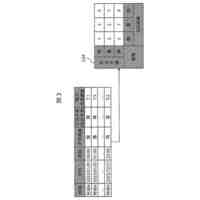
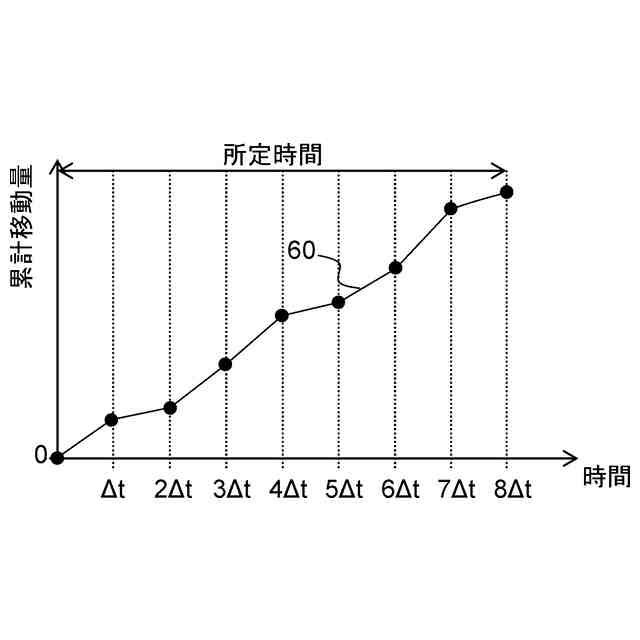
実施例1の作業情報の一例を示す図である。
実施例1の作業情報の一例を示す図である。
実施例1の連続的教示コンテンツとの空間的乖離度を算出する例を示す図である。
実施例1の連続的教示コンテンツとの空間的乖離度を算出する例を示す図である。
実施例1の連続的教示コンテンツとの空間的乖離度を算出する例を示す図である。
実施例1の連続的教示コンテンツとの空間的乖離度を算出する別の例を示す図である。
実施例1の作業者と連続的教示コンテンツとの空間的乖離度を算出する一例を示す図である。
実施例1の作業者と連続的教示コンテンツとの空間的乖離度を算出する一例を示す図である。
実施例1の作業者と連続的教示コンテンツとの空間的乖離度を算出する一例を示す図である。
実施例1の連続的教示コンテンツの特徴点が作業者の視野内にあるかを説明するための図である。
実施例1の連続的教示コンテンツの特徴点と視野の関係の例を説明するための図である。
実施例1の連続的教示コンテンツの特徴点と視野の関係の例を説明するための図である。
実施例1の連続的教示コンテンツの特徴点と視野の関係の例を説明するための図である。
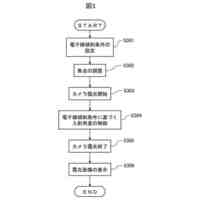
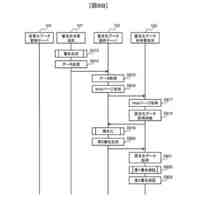
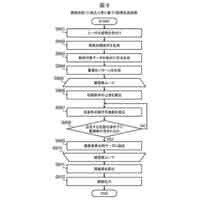
実施例1の制御装置が実行する処理のフローチャートである。
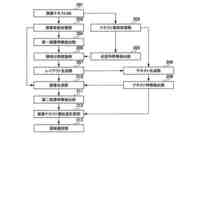
実施例2の制御装置が実行する処理のフローチャートである。
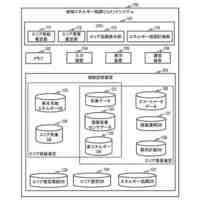
実施例3の制御装置の論理ブロック図である。
実施例3の制御装置が実行する処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社日立製作所
電力変換装置
1日前
株式会社日立製作所
設計支援装置
16日前
株式会社日立製作所
撮像システム
5日前
株式会社日立製作所
電力変換装置
1日前
株式会社日立製作所
情報処理装置
2日前
株式会社日立製作所
気体圧縮装置
22日前
株式会社日立製作所
荷電粒子線装置
11日前
株式会社日立製作所
鉄道車両用台車
17日前
株式会社日立製作所
回路設計支援装置
18日前
株式会社日立製作所
作業支援システム
23日前
株式会社日立製作所
電力調整システム
10日前
株式会社日立製作所
設計支援装置及び方法
19日前
株式会社日立製作所
融通取引提案システム
8日前
株式会社日立製作所
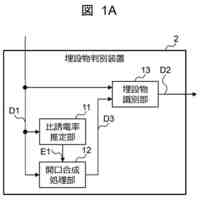
埋設物判別装置及び方法
2日前
株式会社日立製作所
診断装置および診断方法
22日前
株式会社日立製作所
塗装装置、及び塗装方法
5日前
株式会社日立製作所
外転型回転電機及び巻上機
19日前
株式会社日立製作所
電池診断装置、電池診断方法
10日前
株式会社日立製作所
匿名化システムおよび匿名化方法
8日前
株式会社日立製作所
設計支援装置および設計支援方法
4日前
株式会社日立製作所
部材管理装置、及び部材管理方法
10日前
株式会社日立製作所
ネットワーク可視化装置及び方法
9日前
株式会社日立製作所
物体検出方法及び物体検出システム
11日前
株式会社日立製作所
電力授受システム及び電力授受方法
15日前
株式会社日立製作所
情報処理システム及び情報処理方法
17日前
株式会社日立製作所
情報処理システム及び情報処理方法
11日前
株式会社日立製作所
通信中継システム及び通信中継装置
2日前
株式会社日立製作所
開発支援システム及び開発支援方法
4日前
株式会社日立製作所
計画分析方法及び計画分析システム
2日前
株式会社日立製作所
データ出力装置およびデータ出力方法
5日前
株式会社日立製作所
検索式作成装置および検索式作成方法
17日前
株式会社日立製作所
電力取引システム及び電力取引方法。
23日前
株式会社日立製作所
障害検知システム、及び障害検知方法
23日前
株式会社日立製作所
ロボット制御装置及びロボット制御方法
12日前
株式会社日立製作所
スパイク予測装置およびスパイク予測方法
1日前
株式会社日立製作所
無人店舗販売装置および無人店舗システム
19日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ