TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082181
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195479
出願日
2023-11-16
発明の名称
マニピュレータ遠隔操作システム
出願人
日本精工株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250521BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】マニピュレータを遠隔操作でき、かつ、操作者が必要に応じて手作業によりマニピュレータを直接操作できる遠隔操作システムを提供する。
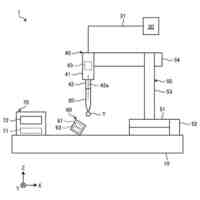
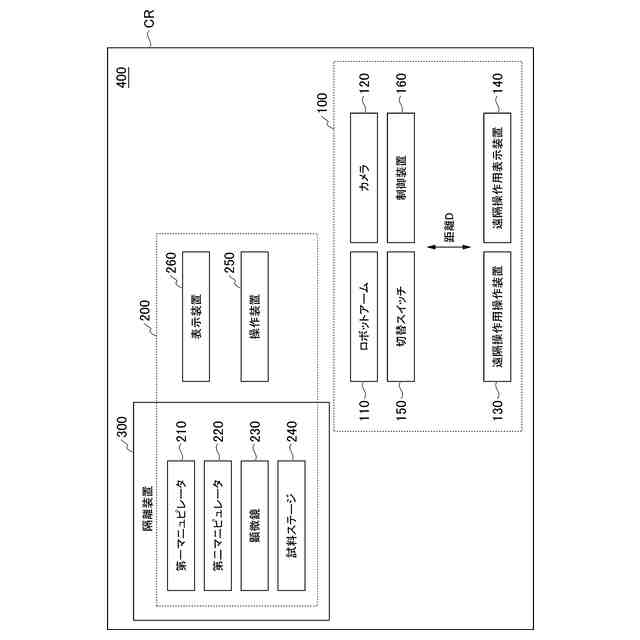
【解決手段】マニピュレータ遠隔操作システムは、操作者が直接操作できるマニピュレータを遠隔操作するシステムであって、マニピュレータを操作するマニピュレータ操作装置と、操作者の操作が入力される遠隔操作用操作装置と、前記遠隔操作用操作装置からの入力に基づいて、前記マニピュレータ操作装置を駆動する制御装置と、を備え、前記遠隔操作用操作装置は、前記マニピュレータ操作装置から離れた位置に配置される。
【選択図】図1
特許請求の範囲
【請求項1】
操作者が直接操作できるマニピュレータを遠隔操作するシステムであって、
マニピュレータを操作するマニピュレータ操作装置と、
操作者の操作が入力される遠隔操作用操作装置と、
前記遠隔操作用操作装置からの入力に基づいて、前記マニピュレータ操作装置を駆動する制御装置と、
を備え、
前記遠隔操作用操作装置は、前記マニピュレータ操作装置から離れた位置に配置される、
マニピュレータ遠隔操作システム。
続きを表示(約 1,000 文字)
【請求項2】
前記マニピュレータは、前記操作者が直接操作を入力可能な操作装置を有し、
前記マニピュレータ操作装置は、前記マニピュレータを動作させる前記操作装置を操作する、
請求項1に記載のマニピュレータ遠隔操作システム。
【請求項3】
前記マニピュレータ操作装置は、ロボットアームである、
請求項2に記載のマニピュレータ遠隔操作システム。
【請求項4】
前記遠隔操作用操作装置は、前記マニピュレータ操作装置から数メートルだけ離れた位置に配置される、
請求項1に記載のマニピュレータ遠隔操作システム。
【請求項5】
前記マニピュレータ操作装置を撮像する撮像装置と、
前記撮像装置が撮像した撮像画像を表示する遠隔操作用表示装置と、
を備える、
請求項1に記載のマニピュレータ遠隔操作システム。
【請求項6】
前記マニピュレータ操作装置による前記マニピュレータに対する操作を有効化または無効化する切替スイッチをさらに備え、
前記制御装置は、前記遠隔操作用操作装置および前記切替スイッチからの入力に基づいて、前記マニピュレータ操作装置を駆動する、
請求項1に記載のマニピュレータ遠隔操作システム。
【請求項7】
前記制御装置は、前記撮像画像に映る前記操作者の位置に基づいて、前記マニピュレータ操作装置による前記マニピュレータに対する操作を有効化または無効化する、
請求項5に記載のマニピュレータ遠隔操作システム。
【請求項8】
隔離装置をさらに備え、
前記マニピュレータは、前記隔離装置の作業領域に設けられている、
請求項1に記載のマニピュレータ遠隔操作システム。
【請求項9】
前記マニピュレータ操作装置は、ロボットアームであり、
前記ロボットアームは、前記隔離装置の外に設けられており、前記隔離装置の前記作業領域に設けられた前記マニピュレータを操作する、
請求項8に記載のマニピュレータ遠隔操作システム。
【請求項10】
前記マニピュレータは、動作軸が電動で駆動される電動マニピュレータであり、
前記マニピュレータ操作装置は、前記マニピュレータの前記動作軸を電動で駆動する操作が入力される操作入力部を操作する、
請求項2に記載のマニピュレータ遠隔操作システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、マニピュレータ遠隔操作システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、バイオテクノロジ等の分野において、顕微鏡観察下で細胞に対する微細な操作を行うマニピュレータを備えたマニピュレータシステムが知られている。例えば、特許文献1に記載のマニピュレーションシステムは、卵等の微小な細胞に対して微細な操作を実施する。
【0003】
細胞に対する操作には扱う細胞が操作者にとって危険である場合があるため、操作者に対する安全性を確保する必要がある。そのため、細胞に対する操作を行うマニピュレータからある程度離れた位置からマニピュレータを遠隔操作できるマニピュレータ遠隔操作システムが望ましい。
【先行技術文献】
【特許文献】
【0004】
特許第3888429号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、マニピュレータからある程度離れた位置からマニピュレータを遠隔操作して細胞に対するあらゆる操作を行うことは難しい。そのため、操作者が必要に応じて手作業によりマニピュレータを直接操作できる柔軟なマニピュレータ遠隔操作システムが望まれている。
【0006】
特に動作軸の駆動が電動化された電動マニピュレータは、例えばモータやギアにより動作軸が駆動されるため、細胞に対して微細な操作を実施できるが、手動でマニピュレータを操作する場合と同様の操作感を得ることは難しい。そのため、電動マニピュレータを遠隔操作する場合においても、操作者が必要に応じて手作業により電動マニピュレータを直接操作できることが望まれている。
【0007】
上記事情を踏まえ、本発明はマニピュレータを遠隔操作でき、かつ、操作者が必要に応じて手作業によりマニピュレータを直接操作できる柔軟なマニピュレータ遠隔操作システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、この発明は以下の手段を提案している。
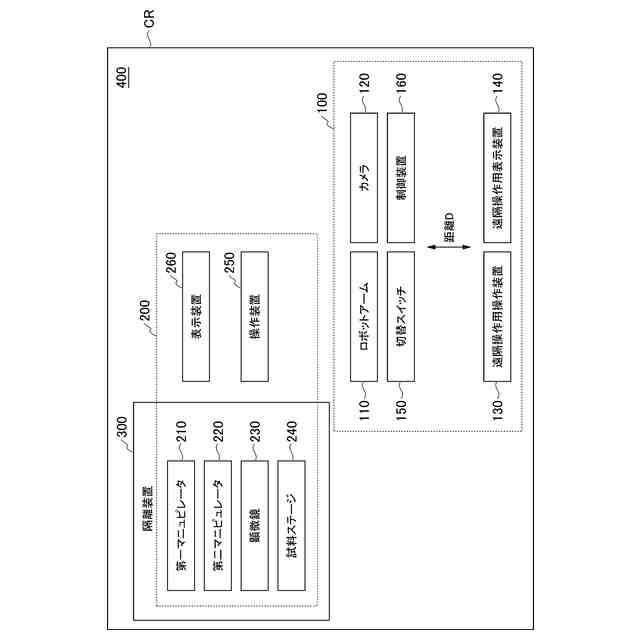
本発明の第一の態様に係るマニピュレータ遠隔操作システムは、操作者が直接操作できるマニピュレータを遠隔操作するシステムであって、マニピュレータを操作するマニピュレータ操作装置と、操作者の操作が入力される遠隔操作用操作装置と、前記遠隔操作用操作装置からの入力に基づいて、前記マニピュレータ操作装置を駆動する制御装置と、を備え、前記遠隔操作用操作装置は、前記マニピュレータ操作装置から離れた位置に配置される。
【発明の効果】
【0009】
本発明のマニピュレータ遠隔操作システムによれば、マニピュレータを遠隔操作でき、かつ、操作者が必要に応じて手作業によりマニピュレータを直接操作できる。
【図面の簡単な説明】
【0010】
一実施形態に係る細胞培養システムのブロック図である。
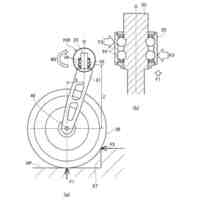
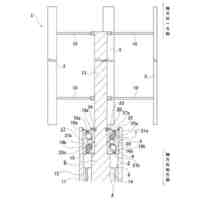
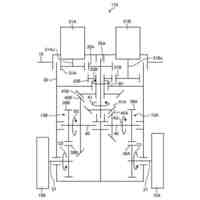
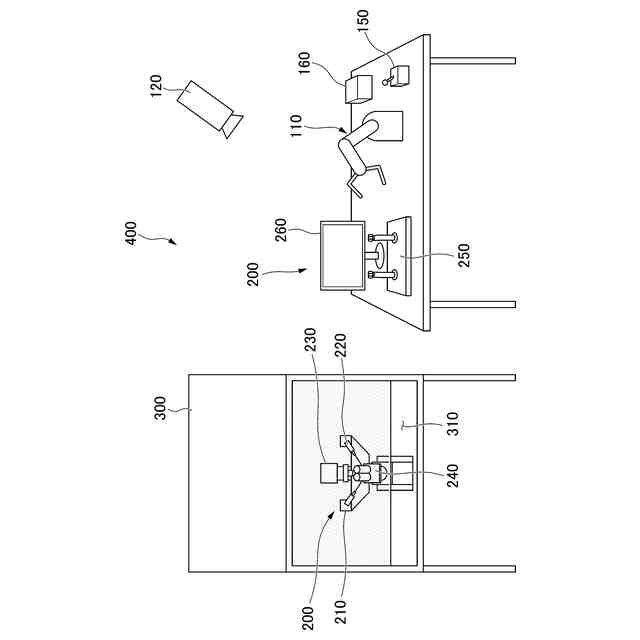
同細胞培養システムの隔離装置とマニピュレータシステムを示す図である。
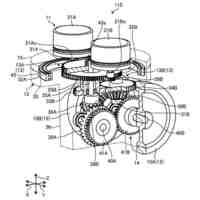
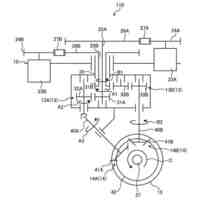
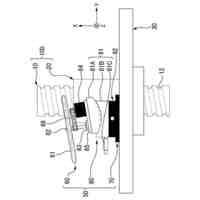
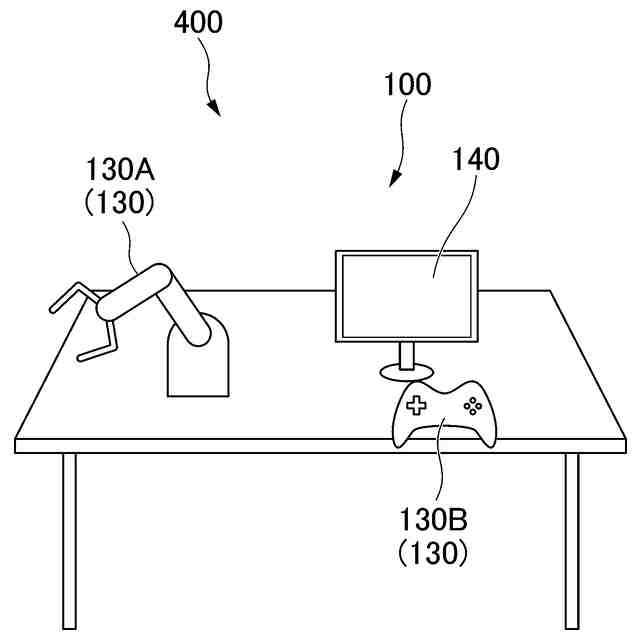
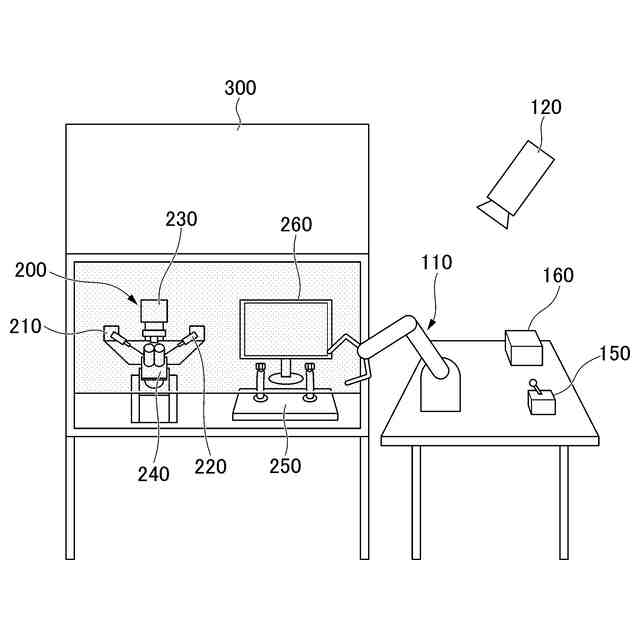
同細胞培養システムのマニピュレータ遠隔操作システムの一部を示す図である。
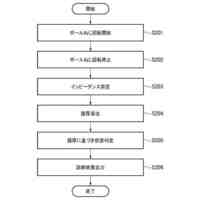
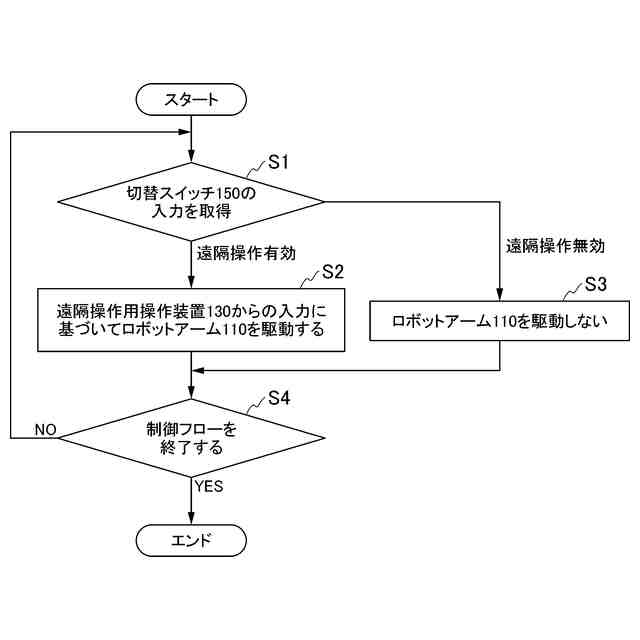
同マニピュレータ遠隔操作システムの制御装置の制御フローを示すフローチャートである。
同マニピュレータ遠隔操作システムの変形例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精工株式会社
差動装置
1か月前
日本精工株式会社
観察装置
1か月前
日本精工株式会社
ボールねじ
1か月前
日本精工株式会社
ボールねじ
5日前
日本精工株式会社
キャスター
14日前
日本精工株式会社
風力発電装置
8日前
日本精工株式会社
風力発電装置
28日前
日本精工株式会社
駆動輪及び台車
29日前
日本精工株式会社
駆動輪及び台車
20日前
日本精工株式会社
駆動輪及び台車
1か月前
日本精工株式会社
電動油圧発生装置
1か月前
日本精工株式会社
ボールジョイント
5日前
日本精工株式会社
樹脂巻き転がり軸受
1か月前
日本精工株式会社
トルク制御クラッチ
2日前
日本精工株式会社
非循環式リニアガイド
1日前
日本精工株式会社
回転センサ一体型軸受
1か月前
日本精工株式会社
トロイダル型無段変速機
1か月前
日本精工株式会社
差動装置およびその製造方法
1か月前
日本精工株式会社
直動案内装置及びその製造方法
27日前
日本精工株式会社
ブラシユニット、及び接続装置
28日前
日本精工株式会社
直動案内装置及びその製造方法
27日前
日本精工株式会社
直動案内装置及びその製造方法
5日前
日本精工株式会社
ボールねじの補修装置及び補修方法
1日前
日本精工株式会社
玉軸受用保持器、及びそれを備える玉軸受
14日前
日本精工株式会社
軸受損傷検出システム及び軸受損傷検出方法
28日前
日本精工株式会社
潤滑状態の診断装置、診断方法、およびプログラム
27日前
日本精工株式会社
ラジアルころ軸受用保持器、及びラジアルころ軸受
9日前
日本精工株式会社
細胞塊負荷変位量測定装置および細胞塊負荷変位量測定方法
21日前
日本精工株式会社
マイクロマニピュレータシステムおよびマイクロマニピュレータシステムの制御方法
5日前
日本精工株式会社
ラジアル転がり軸受の軌道輪の修復方法および製造方法、並びに、スラスト転がり軸受の軌道輪の修復方法および製造方法
今日
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
27日前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
28日前
工機ホールディングス株式会社
作業機
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ